PW6001_user_manual_chi_20191018H.pdf - 第95页
89 查看马达测量值 (带马达 &D/A 型号) 检测马达的旋转方向 在旋转信号输入 CH B 与 CH C 输入端子中输入增量式旋转编码器的 A 相脉冲与 B 相脉冲时,可检测 轴的旋转方向并在转速上附加极性符号。 如果在测量项目的设置中选择模式 1 或模式 2 ,则会检测旋转方向。 按照 A 相脉冲与 B 相脉冲的上升 / 下降检测时序,根据另一方的电平 (High/Low) 判定旋转方向。 A 相 B 相 正转 转速的极性…
88
查看马达测量值(带马达 &D/A型号)
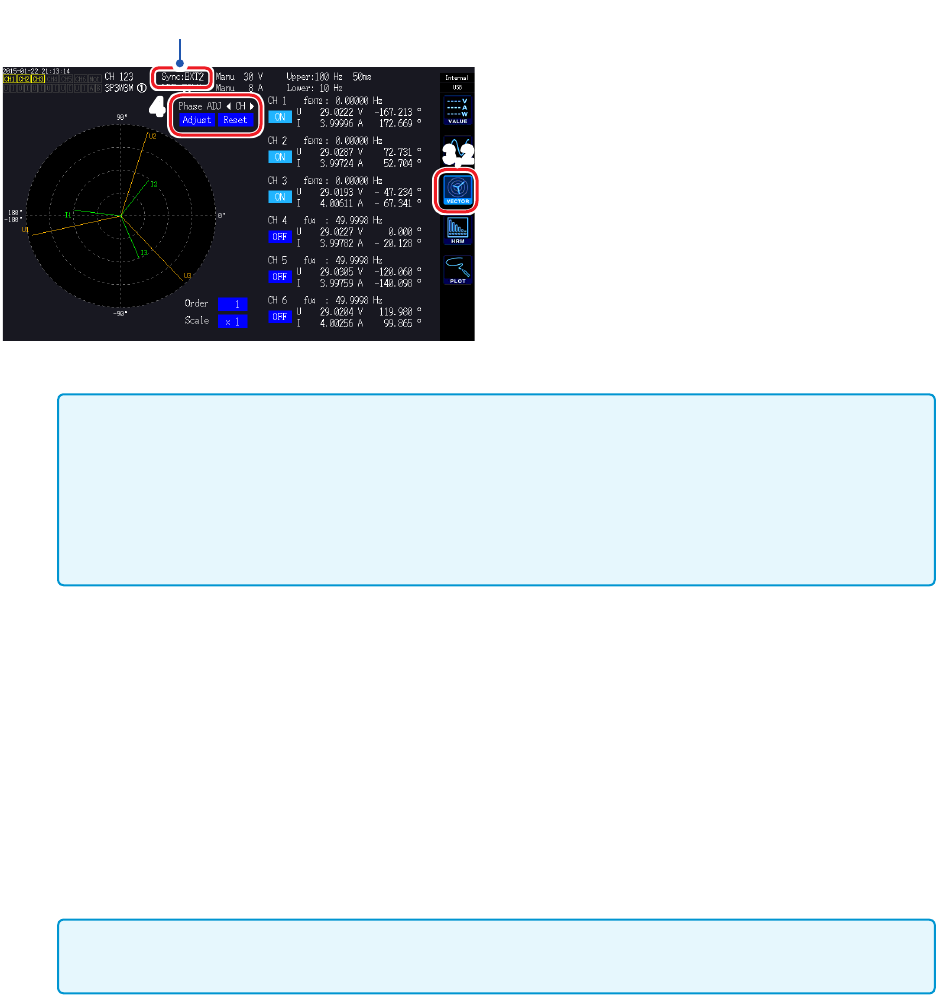
相位调零 (PHASE ADJ)
对同步源的脉冲与已接线开头通道的电压基波成分的相位差进行零点补偿。
3,2
显示通道的同步源
4
1
按下 [MEAS] 键
2
触摸 VECTOR
3
选择矢量画面 (VECTOR1)
4
利用 [CH] 键选择执行相位角调零的通道,
然后触摸 Phase ADJ 的 Adjust
•
相位调零仅在同步源设置为
Ext1 或 Ext2 时有效。除此之外的设置时,即使进行按键操作也不
进行操作。
•
为同步解锁状态时,该键操作不起作用。
•
即使进行本仪器电源的
ON/OFF操作,也保持补偿值。
•
如果触摸
Reset,补偿值则会被清除,并返回到显示与基准脉冲的相位差的操作。
•
即使进行了系统复位,补偿值也会被清除。
电相角测量示例
1
在马达不通电的状态下,从负载侧旋转马达,测量马达输入端子上产生的感应电压
2
进行相位调零
将输入到
U1中的感应电压波形的基波成分与脉冲信号的相位差设为零。
3
接通马达电源,使马达旋转
在本仪器中测量的电压与电流相位角是以感应电压为基准的电相角。
由于相位差包括旋转输入信号脉冲波形的影响或本仪器内部电路的延迟等因素,因此,测量与已
进行相位调零的频率相差较大的频率时,这部分就会发生测量误差。
89
查看马达测量值(带马达 &D/A型号)
检测马达的旋转方向
在旋转信号输入 CH B 与 CH C输入端子中输入增量式旋转编码器的 A 相脉冲与 B相脉冲时,可检测
轴的旋转方向并在转速上附加极性符号。
如果在测量项目的设置中选择模式 1 或模式 2,则会检测旋转方向。
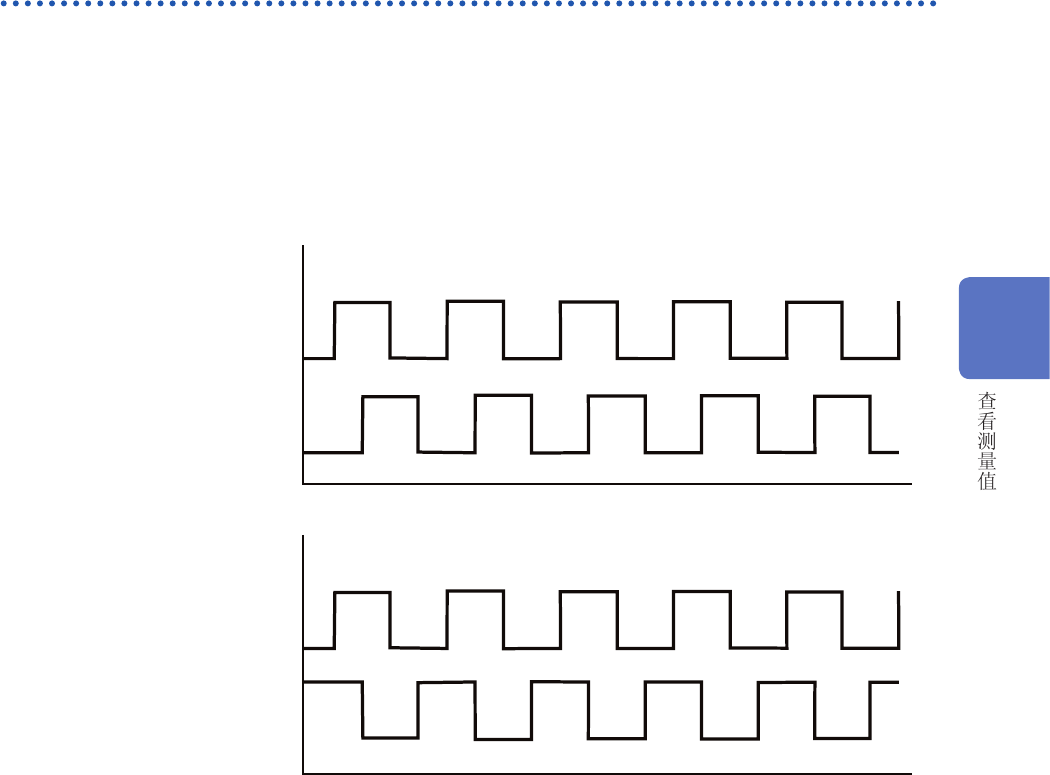
按照 A 相脉冲与 B相脉冲的上升 / 下降检测时序,根据另一方的电平 (High/Low) 判定旋转方向。
A相
B相
正转
转速的极性符号为 +
A相
B相
反转
转速的极性符号为 -
已检测的旋转方向作为极性符号附加在转速测量值上,并且也会反映到马达功率 (Pm) 的测量值中。
3
90
查看马达测量值(带马达 &D/A型号)
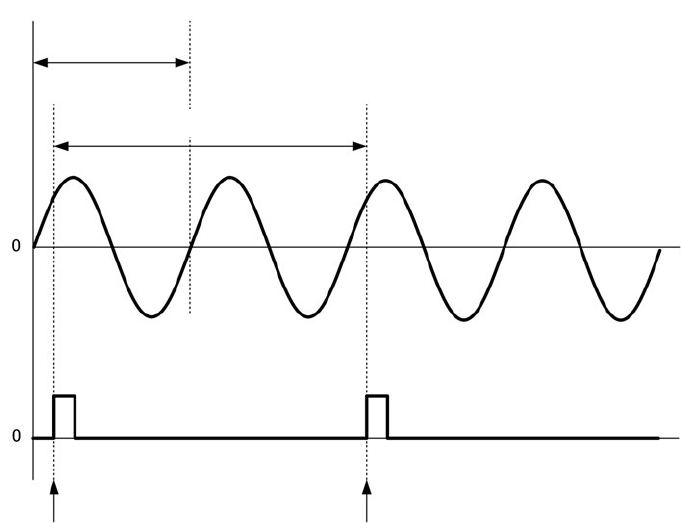
如果旋转信号输入中输入了脉冲,并且在
CH D中输入原点信号 (Origin) 时将输入通道 1 ~ 6的同步源设
为 Zph.,则可查看以马达旋转 1 圈(机械角 1周期)为基准的电压 /电流测量值。
基波频率 (U1)
外部同步信号(Z 相)
基准
运算范围
基准
4极马达示例
•
由于可始终将马达旋转
1圈作为运算范围进行处理(与马达极数无关),因此,可对因马达机械特性而导
致的各极偏差进行平均化测量。
•
作为“马达极数
/2”的次数,电压/ 电流的谐波测量值会以基波测量值的形式出现。在这之后,“马达极数
/2 × n”会以电压 /电流的 n 次谐波的形式出现。
•
电压
/电流的频率测量值用于测量电压 / 电流的基波频率。
•
可在马达分析的动作模式(第
80页)为 Single时使用。
•
请进行与
CH A ~ CH D测量项目(第 82 页)相应的输入。不仅要向 CH D(Z 相脉冲)中输入原点信号,
而且还要向 CH B(A 相脉冲)、CH C(使用Direction时的 B 相脉冲)中正确地输入旋转信号。
•
要将任意脉冲(而非旋转编码器输出的脉冲)用作运算范围的基准时,建议采取将马达分析的动作模式设
为
Indiv.,将输入通道1 ~ 6的同步源设为 CH C 或 CH D的方法。请在选择的同步源中输入基准脉冲。