AIM 系统手册 QD049-04.pdf - 第86页
4. 生产 QD049-04 72 AIM 系统手册 4.11 补充说明 4.11.1 模组故障时的轨道搬运应用功能 当模组内的单元或者伺服马达发 生故障时, 就无法进行 AIM 全部机器的生产 。 但是, 尽管有 故障的模组,通过只应用搬运轨 道的搬运,也能够继续生产线的生 产。 首先,请确定故障部位。根据故 障的部位,也可能不能应用搬运轨 道的搬运。 可以应用时,请通过以下的步骤 进行准备 , 然后重新开始生 产。 1. 请查看模组…

QD049-04 4. 生产
AIM 系统手册 71
4.10 发生错误的处理
当发生了某种异常后,就会显示出错误画面。
发生错误时,请参考下述的示意图委托维修保养人员或者技术员排除错误原因。
1. 必要时,请按 READY ON 恢复通常的生产。
6<6D
⇣Ᏹේ࿃
Seek Number
6HHN1XPEHU
ᓖᐌॳ
ᓖᐌ㾷䰸ℹ偸
⬏䴶ᰃᓖᐌᇐⱘϔϾ՟ᄤDŽ
ֵᙃ
ֵᙃ
ҹ⼎ᛣᰒ⼎ᓖᐌⱘॳᓖᐌⱘऩܗDŽ
䖭䞠ˈ㸼⼎থ⫳њⓣ⇨DŽ
ᓖᐌⱘॳDŽ䰘ࡴ䕃ӊЁ㛑ᰒ⼎ࡴ䆺㒚ⱘݙᆍDŽ
ᰒ⼎ᓖᐌԡ㕂ⱘ,2䕧ߎ䕧ܹ⢊ᗕˈᓖᐌⱘऩܗৡㄝ
䖯㸠ᓖᐌ㾷䰸ᯊ᠔䳔ⱘֵᙃDŽ
ENABLE LOCK
AIMOPE046a
READY ON
4. 生产 QD049-04
72 AIM 系统手册
4.11 补充说明
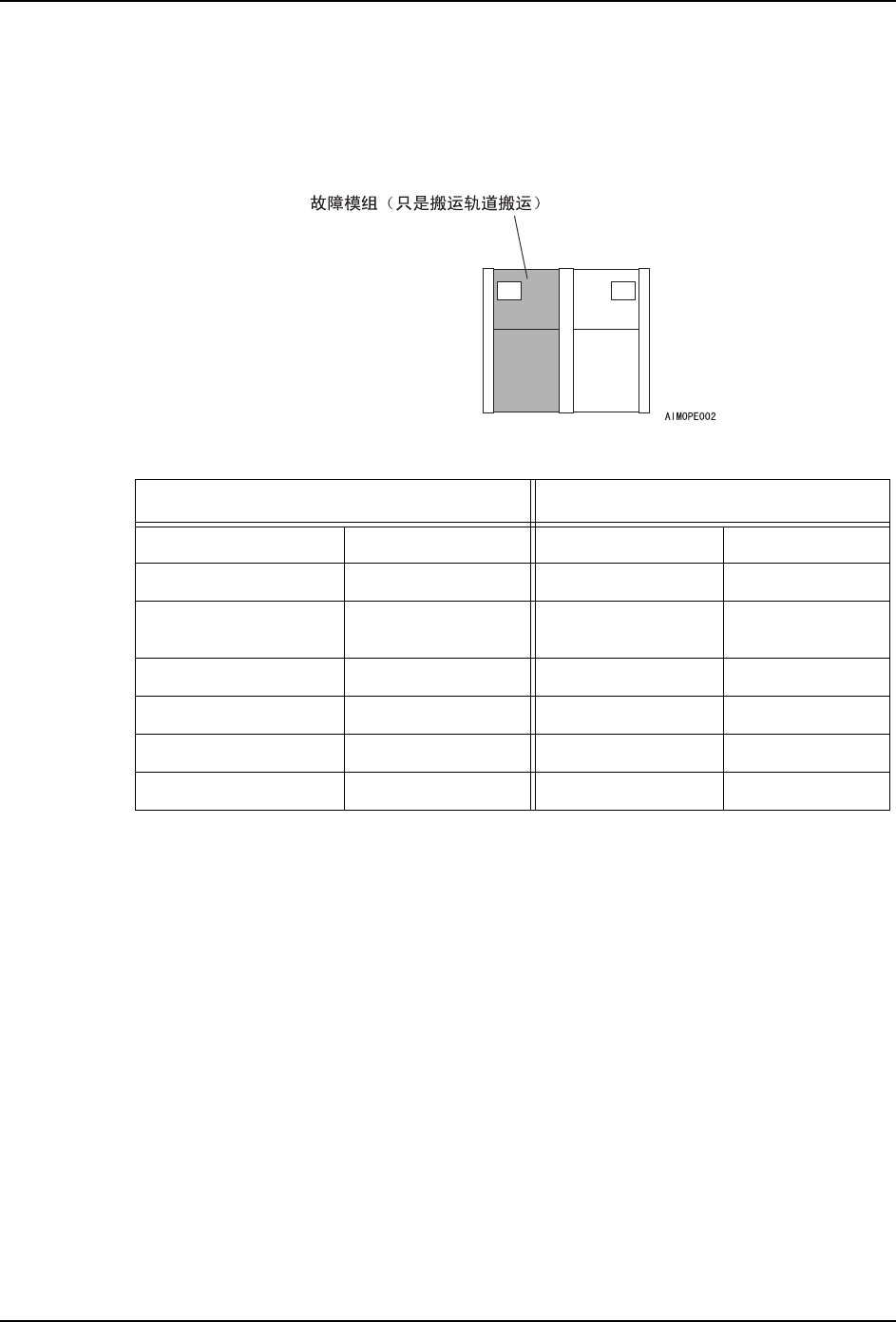
4.11.1 模组故障时的轨道搬运应用功能
当模组内的单元或者伺服马达发生故障时,就无法进行 AIM 全部机器的生产。但是,尽管有
故障的模组,通过只应用搬运轨道的搬运,也能够继续生产线的生产。
首先,请确定故障部位。根据故障的部位,也可能不能应用搬运轨道的搬运。
可以应用时,请通过以下的步骤进行准备 , 然后重新开始生产。
1. 请查看模组内部,确认是否有生产中的电路板。如果有电路板,请通过送出运转或者手
动指令取除电路板。
备注 ) 送出运转、手动指令的操作都不能进行时,请关闭主开关用手取除。
2. 使故障的模组进入睡眠模式。请按住 POWER 按钮 4 秒以上然后放开。
3. 通过附加软件将故障的模组设定成轨道搬运应用。从 [ 模组功能设定 ] 中选择 [ 故障时
应用 ] 并设定成 [ 只是电路板搬运 ]。
4. 通过 Fuji Flexa 创建对应故障模组的 Job。请编辑目前使用着的 Job,将分配给故障模
组的供料器和顺序分散到其他模组。
备注 ) 进行优化时,请不要进行 [ 供料器的重新配置 ]。有可能将供料器分配给故障模组。
5. 请按下 POWER 按钮,进入唤醒模式。
6. 从 Fuji Flexa 将 Job 传送到机器。
7. 请按下 START 按钮开始生产。
可以应用 不能应用
伺服放大器 伺服马达 CPU 电路板 伺服电路板
XY 机械手 机械手电缆 影像处理电路板 DIO
废料带处理单元 吸嘴更换器 远程控制 I/O 串行通信
(RS232C)
吸嘴置放台 定位相机 IEEE1394 操作面板
元件相机 料站单元 安全门
搬运轨道 模组控制箱
与气压有关
QD049-04 4. 生产
AIM 系统手册 73
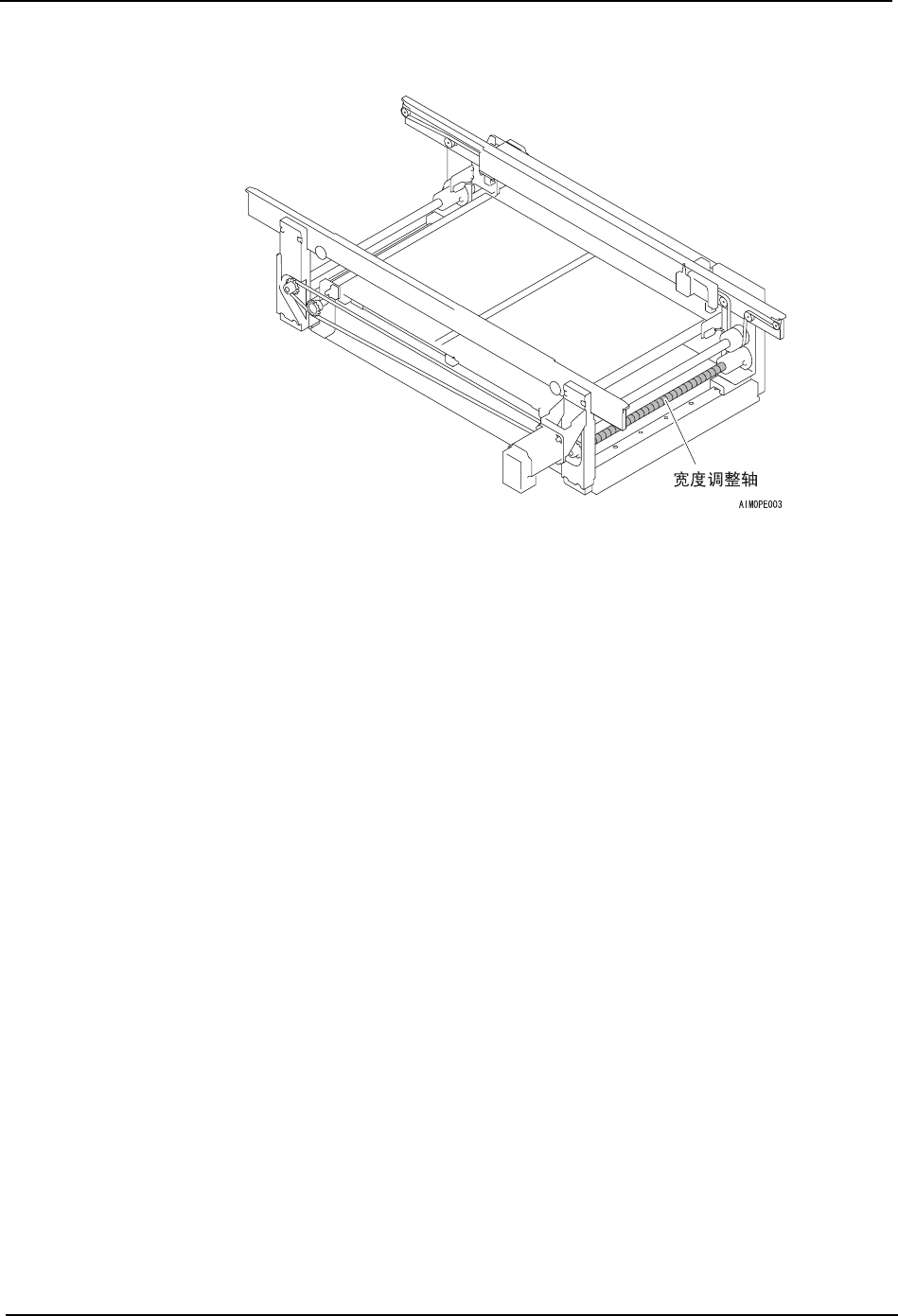
备注 ) 在搬运轨道搬运应用中设定的模组不进行搬运轨道的宽度调整。需要宽度调整时,请直接用手
旋转调整轴。另外,进行了宽度调整后,必须调整传感器感度。详细请参照 [AIM 机械手册 ]。
备注 ) 有关发生故障的地方,请委托专业技术人员或者本公司服务人员进行修理及更换。