CX-1_动作说明书.pdf - 第10页
R e v 2 . 0 0 动作说明书 2- 3 2-3 Z、θ轴的说明 MNLA 说明贴装头 图 2-3 Z 马达向 CW 方向转动, Z 轴向+方向移动 0.00125mm/pls 同步皮带 Z 1 . 5 G T - 9 4 牙 Z 皮带轮 3 0 牙 Z 皮带轮 3 0 牙 Z 马达 40W 1200ppr 4 倍 后通路 球螺丝 6 × 6 同步皮带θ θ皮带轮 1 . 5 G T - 1 0 7 牙 3 6 牙 θ马达皮带轮…
Rev 2.00
动作说明书
2-
2
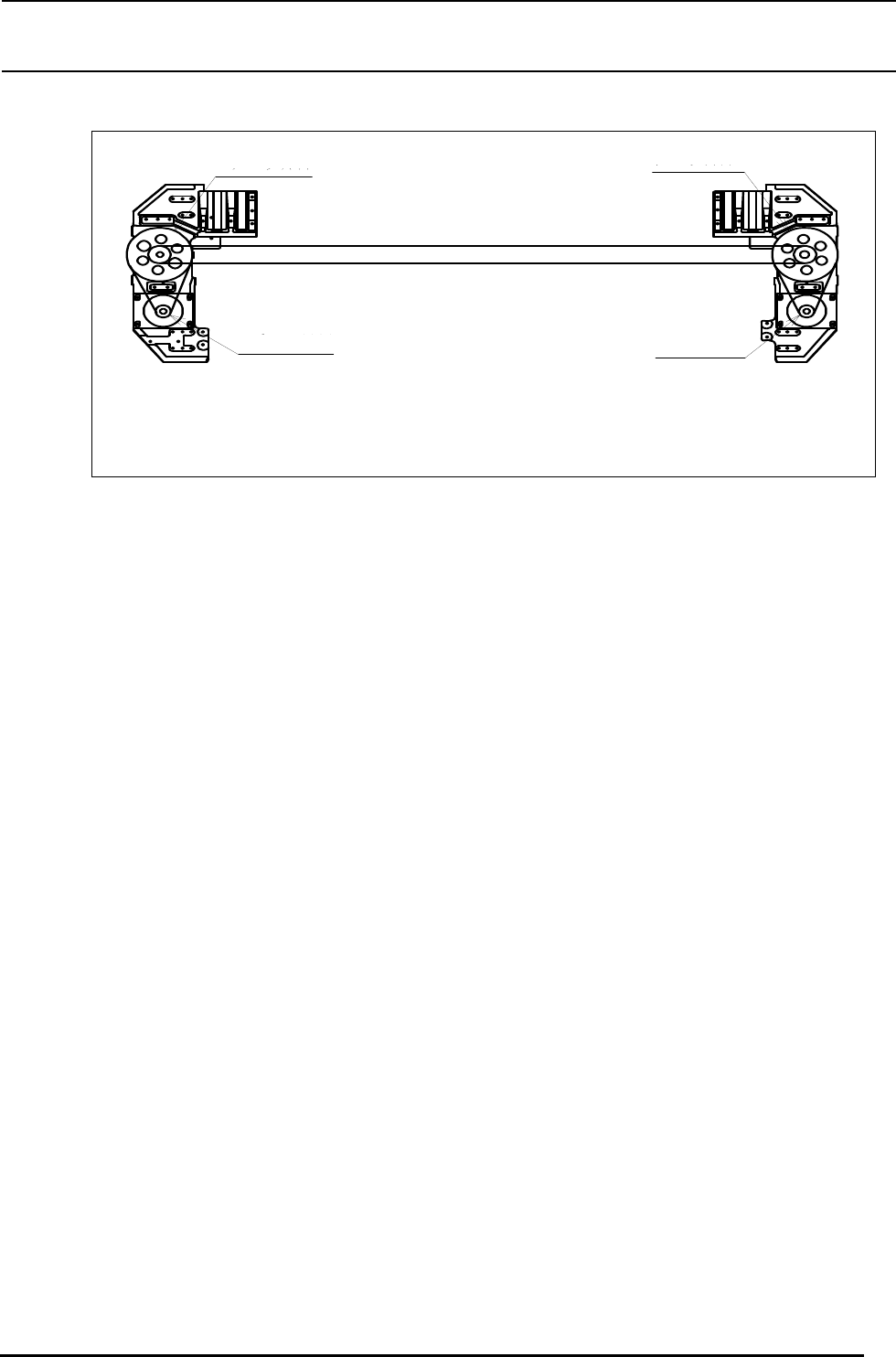
2-2 X轴的说明
皮带轮XM和皮带轮XA的减速比 30:120
皮带轮XA的间隔圆直径比 33.42mm:114.59mm
平均马达 1 圈的移动量
30/120×33.42mm×π=26.25mm
马达变换器的分辨率
131072pls(实际马达变换器分辨率)
16384pls×4倍=65536pls(MEI控制用)
因此,平均 1 脉冲的移动量
26.25mm/65536pls=0.4005μm/pls
线性标尺的分辨率为
1μm
外部变换器的断线检测
马达变换器和外部变换器(线性标尺)的差设定为马达变换器的1/4转以上时报警,关闭伺服。
变换器的脉冲变化量的差超过
26.25mm/4=6.5625mm=16384pls(马达变换器标准)
之后报警。
皮带轮 X
A
皮带轮 XM
皮带轮 XA
皮带轮 XM
皮带轮XA
皮带轮XA
皮带轮XM 皮带轮XM
马达输出 600W×2 图2-2
Rev 2.00
动作说明书
2-
3
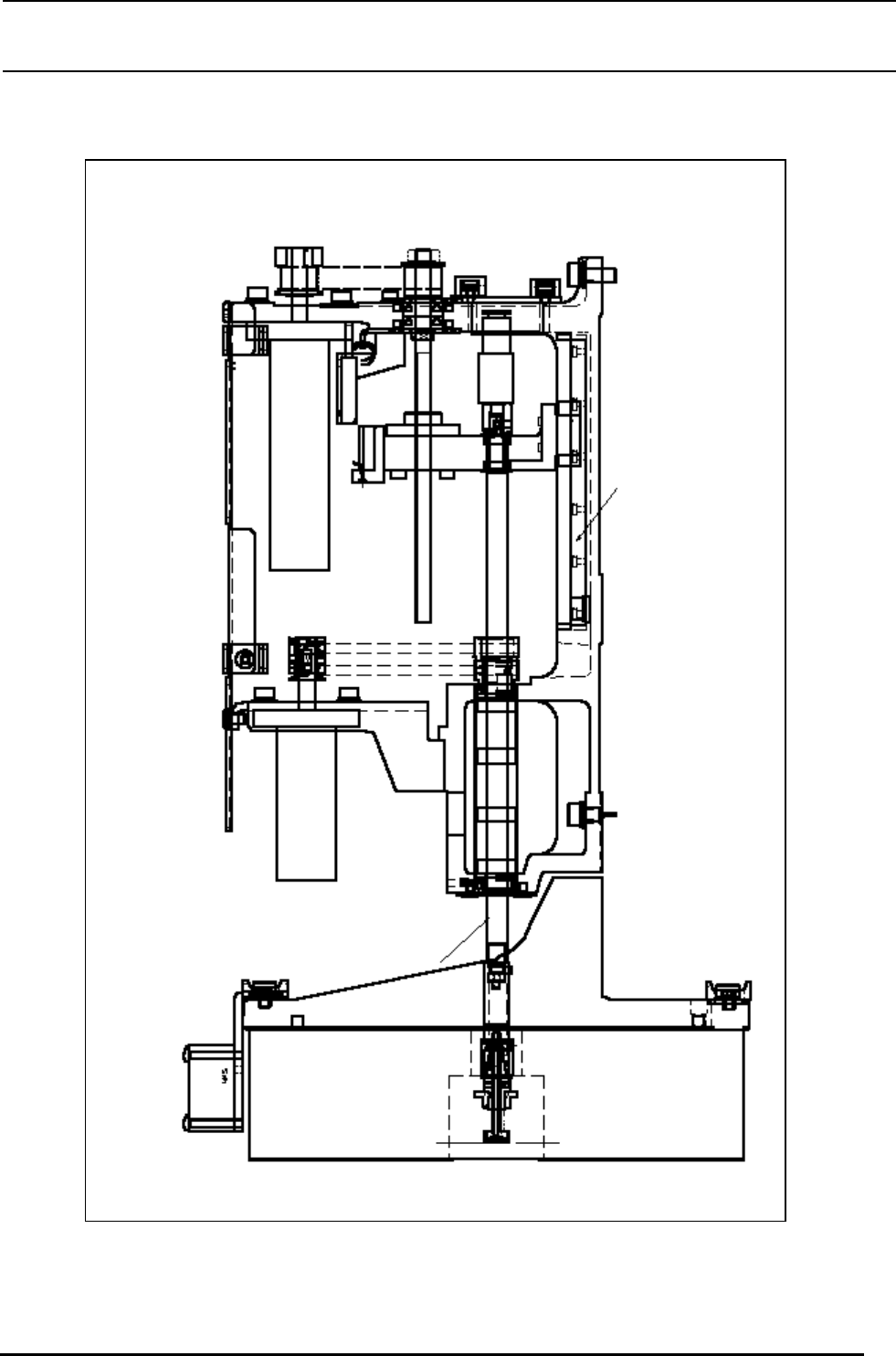
2-3 Z、θ轴的说明
MNLA 说明贴装头
图 2-3
Z 马达向 CW 方向转动,Z 轴向+方向移动 0.00125mm/pls
同步皮带 Z
1.5GT-94牙 Z皮带轮
30牙
Z皮带轮
30牙
Z 马达
40W
1200ppr
4 倍 后通路
球螺丝
6×6
同步皮带θ θ皮带轮
1.5GT-107牙 36牙
θ马达皮带轮
30 牙
θ马达
13W
9000ppr
4 倍
θ马达向 CW 方向转动,θ轴-方向转动
0.01°/pls
球弹簧
MNLA
Rev 2.00
动作说明书
2-
4
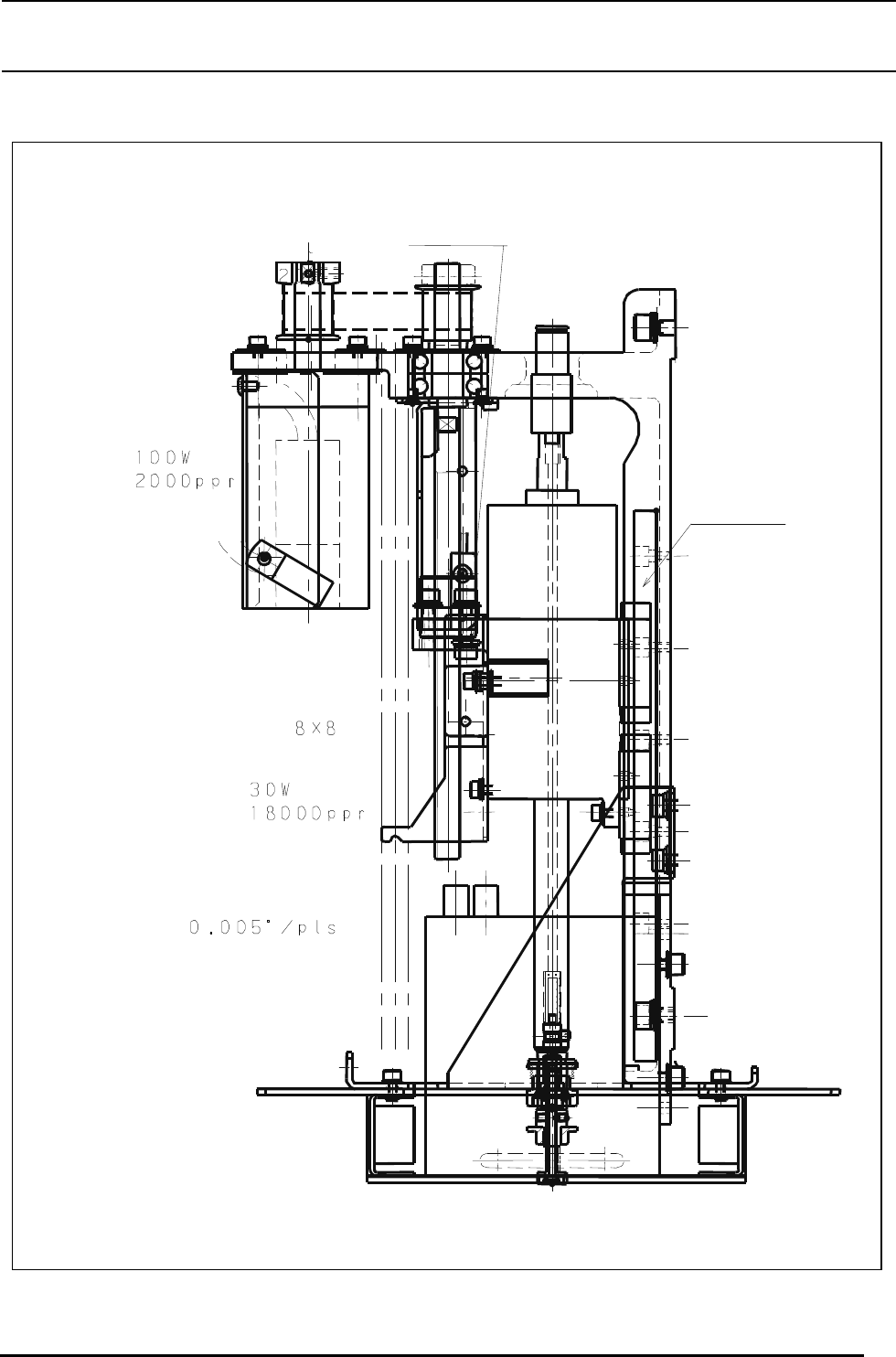
FMLA 贴装头(R 贴装头选购件)
Z 马达向 CW 方向转动,Z 轴向+方向移动 0.001mm/pls
同步皮带 Z
3GT-30 牙
Z 皮带轮
20 牙
Z 马达
4 倍
Z 皮带轮
20 牙
Z 原点传感器 (Z 轴为 XY 移动高度时 ON)
后通路
4 倍
θ马达向 CW 方向转动,
θ轴+方向转动
θ马达
球螺丝
图 2-4