CX-1_动作说明书.pdf - 第13页
R e v 2 . 0 0 动作说明书 3- 1 3 关于各种功能 3-1 原点复位动作的说明 3-1-1 θ轴原点复位 θ 轴的原点复位动作时,各个贴装头进行下列动作。 3-1-2 Z轴的原点复位 Z 轴的原点复位动作时,让每个 Z軸 起动压旋螺丝,进行下列的动作。 Homeセンサ位置 (位置) HomeセンサONから のINDEX位置 レーザ高さ 基板上面高さ (位置) (時間) ② ① ③ ④ ⑤ ⑥ ⑦ ① 电源 ON 时的 …
Rev 2.00
动作说明书
2-
5
2-3-1 Z轴的分辨率
MNLA 贴装头
Z轴减速比 1.0
Z马达变换器 1200 Pulse/round(4倍时4800ppr)
因此分辨率为6/(4800×1.0)=0.00125mm/pulse
FMLA 贴装头
Z 轴减速比 1.0
Z 马达变换器 2000 Pulse/round(4倍时8000ppr)
因此,分辨率为8/(8000×1.0)=0.001mm/pulse
2-3-2 θ轴的分辨率
MNLA 贴装头
θ轴减速比 1.0
θ马达变换器 9000 Pulse/round(4倍时36000ppr)
因此,分辨率为360/(36000×1.0)=0.01 deg/pulse
FMLA 贴装头
θ轴直联变换器 18000 Pulse/round(4倍时72000ppr)
因此,分辨率为360/72000=0.005 deg/pulse
Rev 2.00
动作说明书
3-
1
3 关于各种功能
3-1 原点复位动作的说明
3-1-1 θ轴原点复位
θ轴的原点复位动作时,各个贴装头进行下列动作。
3-1-2
Z轴的原点复位
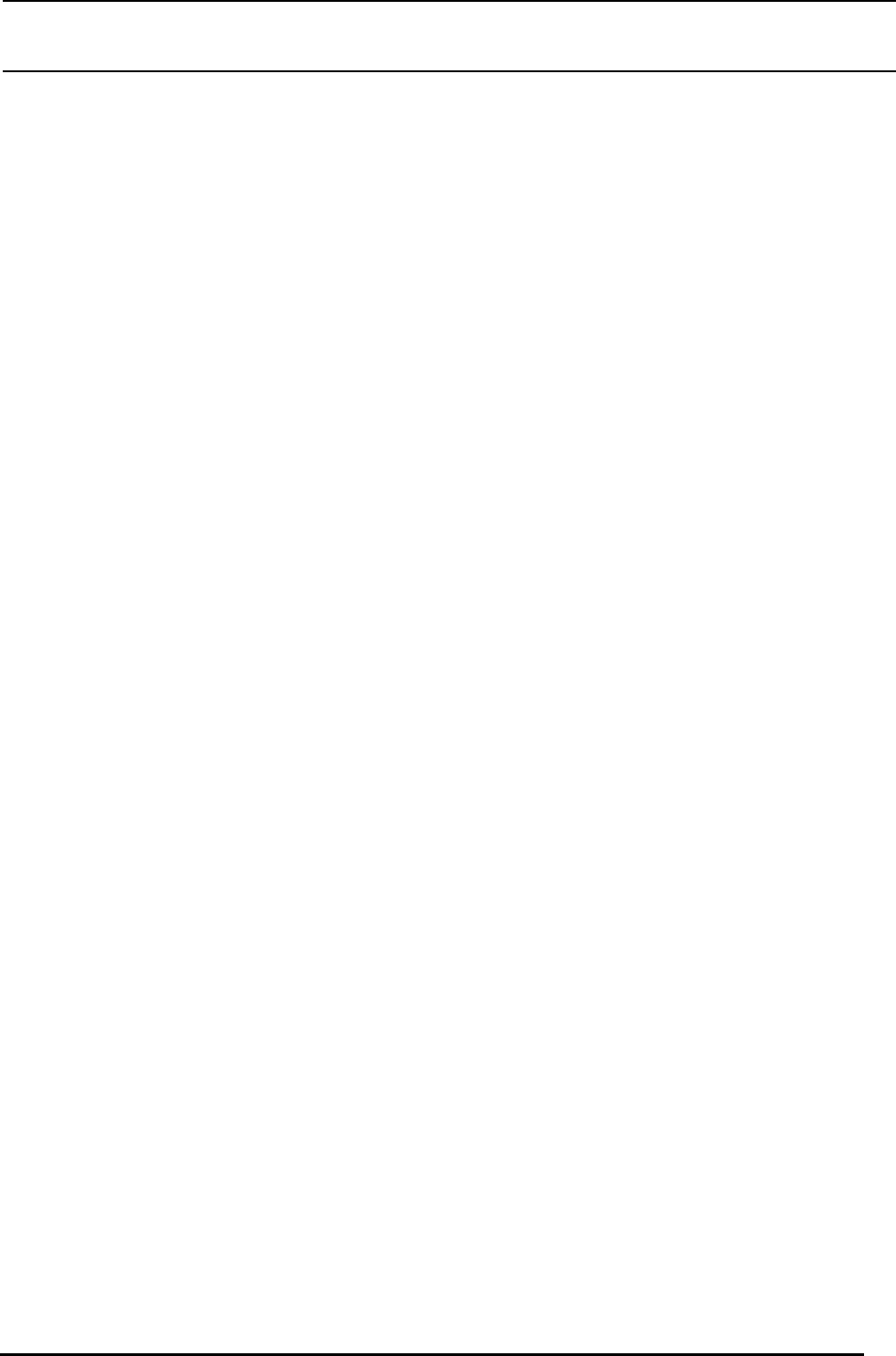
Z 轴的原点复位动作时,让每个 Z軸起动压旋螺丝,进行下列的动作。
Homeセンサ位置
(位置)
HomeセンサONから
のINDEX位置
レーザ高さ
基板上面高さ
(位置)
(時間)
②
①
③
④
⑤
⑥
⑦
① 电源 ON 时的 Z 轴位置。
② Home 传感器上下到 ON 位置。
③ Home 传感器下降到 OFF 位置。
④ Home 传感器上升到 ON 位置。(缓慢)
⑤ Home 传感器检测 ON 后,把最初的 INDEX 上升到接收器。
⑥ 移动到 INDEX 接收器位置。
在 INDEX 接收器位置,把加上基板高度对称的位置作为现在的位置,设定为 Actual Pos
/Command Pos。
⑦ 移动到激光高度。
注)基板高度对称 = XY移动高度(设计值)- (基板上面高度~⑥位置的距离)
原点复位时间゙ 処理内容
电源 ON 时的原点复位 检出零相位,进行原点复位。
第 2 次以后的原点复位 返回 0 位置。
(位置)
从 Home 传感器 ON 的
INDEX 位置
Home 传感器位置
激光高度
基板上面高度
(时间)
Rev 2.00
动作说明书
3-
2
3-1-3 XY轴的原点复位
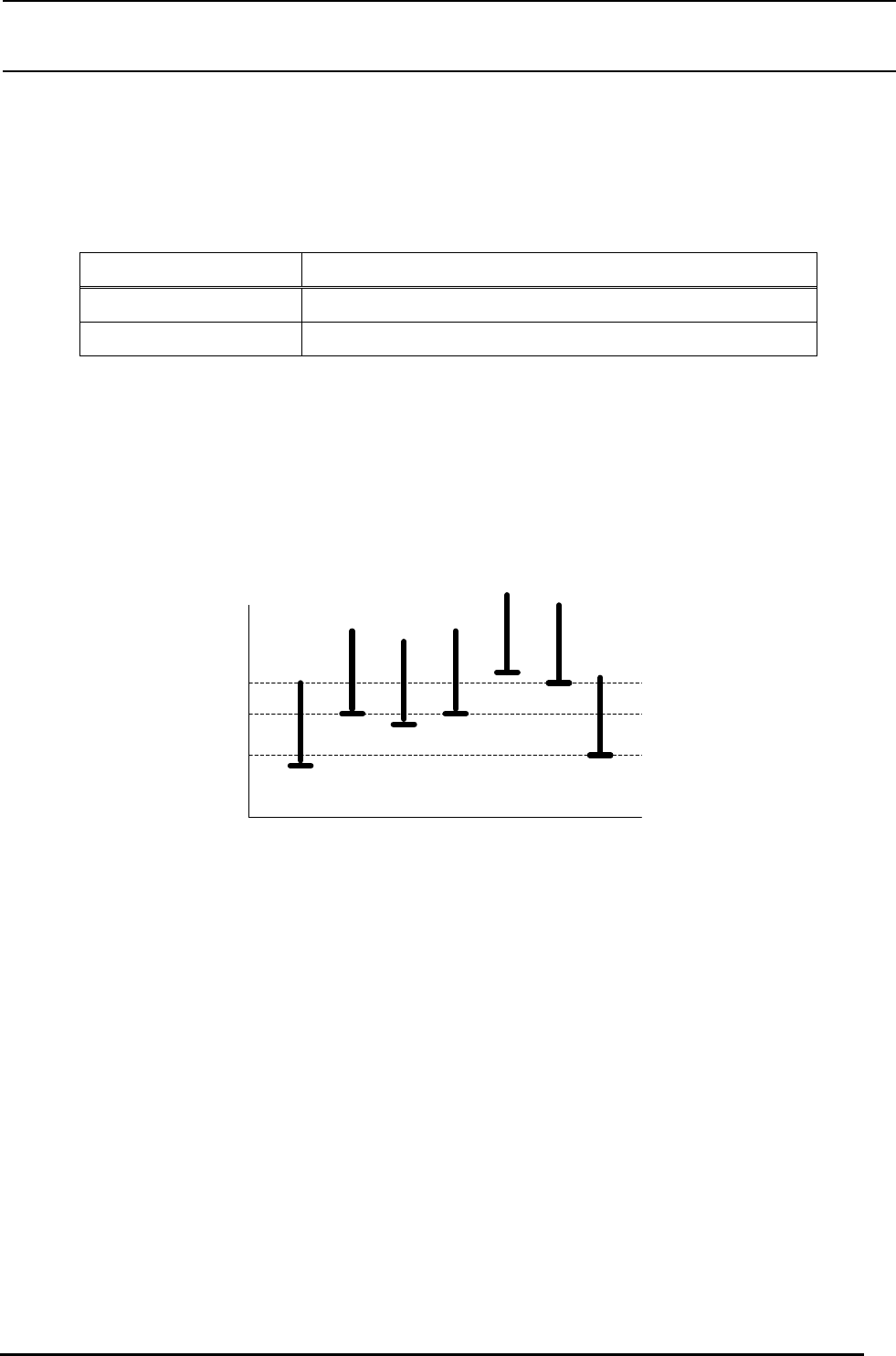
XY 轴的原点复位动作时,进行下列动作。
X 轴的原点复位动作∶
Homeセンサ位置
(位置)
(時間)
②
①
③
④
(エンコーダ)
0
(600パルス)
A
ソフトリミット
① 电源 ON 时的 X 轴位置。
② Home 传感器移动到 ON 位置。
③ Home 传感器检测 ON 后,移动 1200 脉冲。
④ Home 传感器移动到 ON 接收器位置。(A 位置)
注1) Home 传感器从 ON 位置开始时,让机器移动 5000 脉冲,移动到①的位置(Home 传感器
OFF 位置)后,进行上述的动作。
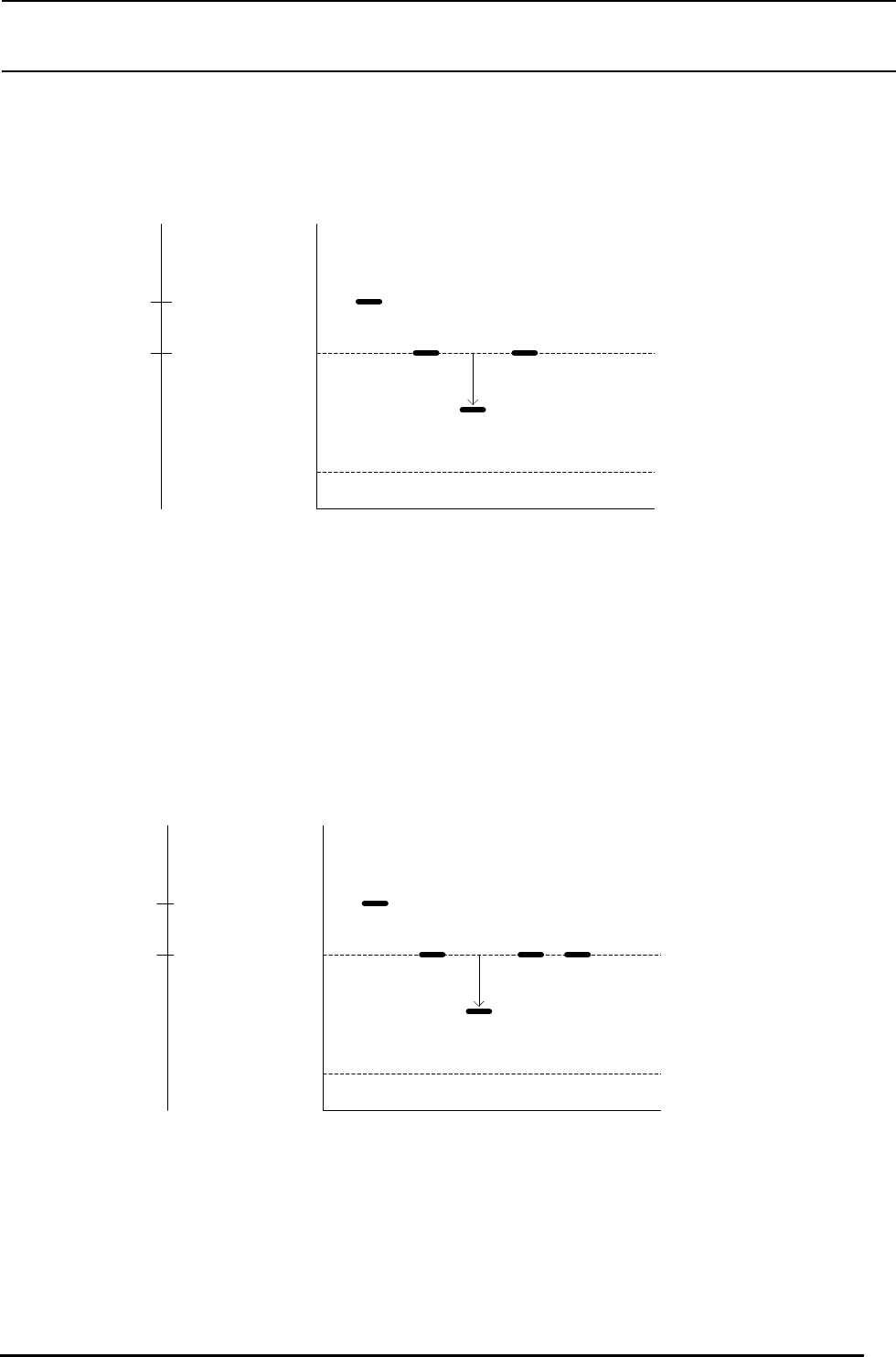
Y 轴的原点复位动作:
Homeセンサ位置
(位置)
(時間)
②
①
③④
(エンコーダ)
0
(600パルス)
A
ソフトリミット
⑤
① 电源 ON 时的 Y 轴位置。
② Home 传感器移动到 ON 位置。
③ Home 传感器 ON 检测后移动 1200 脉冲。
④ 移动到 Home 传感器 ON 捕获位置。(A 位置)
(变换器) (位置)
Home 传感器位置
(1200 脉冲)
软限制
(时间)
(变换器) (位置)
Home 传感器位置
(1200 脉冲)
软限制
(时间)