CX-1_动作说明书.pdf - 第119页
R e v 2 . 0 0 动作说明书 5- 31 Zθドライバ (電流アンプ) モーション コントロール基板 (XMP基板 JHRMB基板) 上位ホスト コントローラ (CPU基板) CPCIバス Zエンコーダ θエンコーダ Zシリアル指令 θシリアル指令 Z速度、位置フィードバ ック θ電流フィードバック Z電流フィードバ ック θ速度、位置フィードバ ック θモータ(IC) Zモータ ノズル Z駆動U,V,W θ駆動U,V,W 移…
Rev 2.00
动作说明书
5-
30
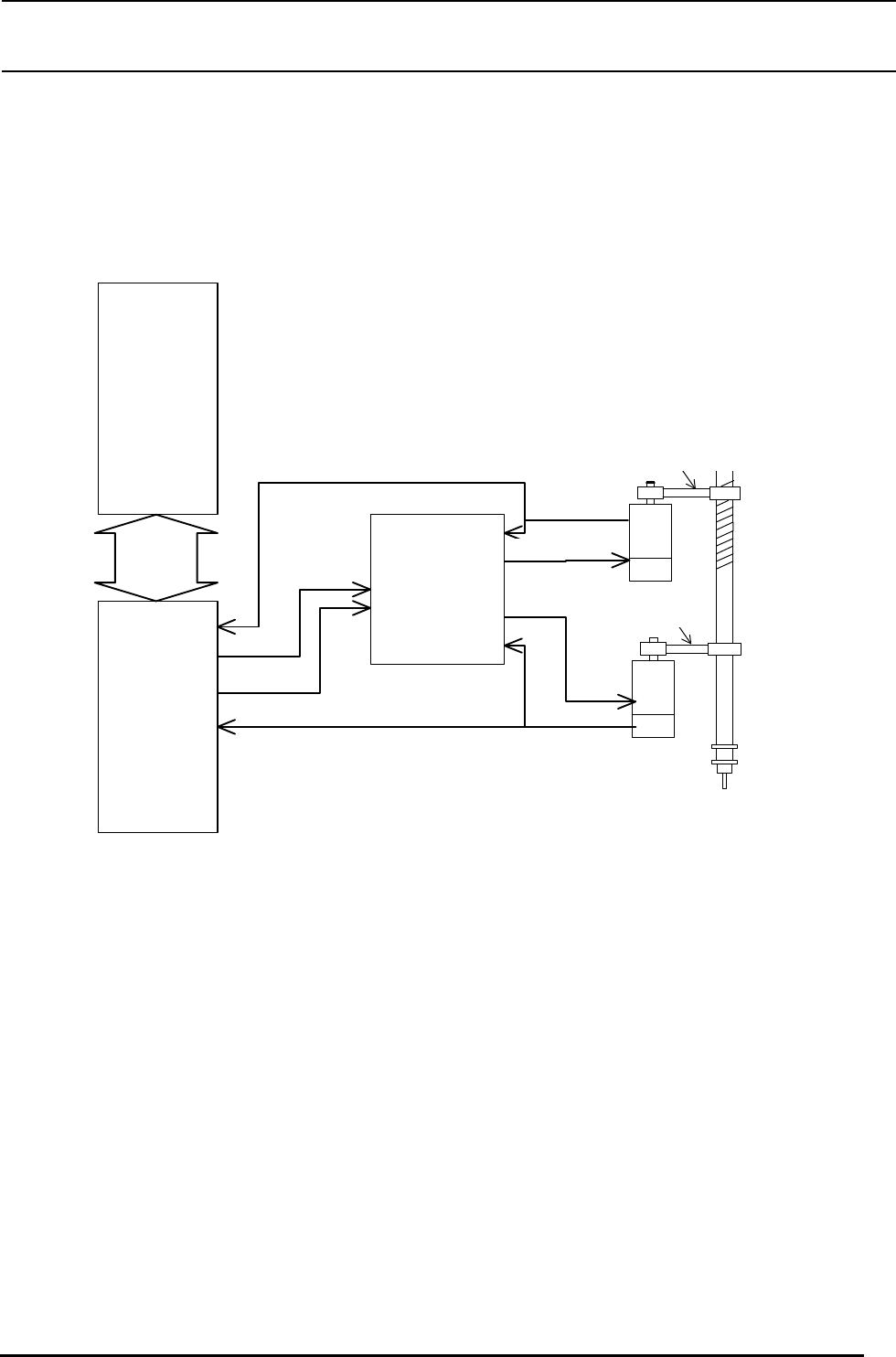
5-2-2 Z,θ轴的控制方式
Z、θ轴马达控制采用板十字环方式。
Zθドライバ
(電流アンプ)
モーション
コントロール基板
(XMP基板
JGRMB基板)
上位ホスト
コントローラ
(CPU基板)
CPCIバス
Zエンコーダ
θエンコーダ
Zシリアル指令
θシリアル指令
Z速度、位置フィードバック
θ電流フィードバック
Z電流フィードバック
θ速度、位置フィードバック
タイミングベルト
タイミングベルト
Zモータ
θモータ
ノズル
Z駆動U,V,W
θ駆動U,V,W
移動データ
θ分解能:0.025°
Z分解能:1.25μm
上位主控
(CPU基板 )
移 动 数据
CPCI 母 线
Z速度, 位置供料器
Z分辨率
同 步 皮 带
Z马 达
Z变换器
驱动器
( 电 流放大器)
Z串行指令
Z电 流反馈
Z驱动
同 步 皮 带
电 流反馈
变换器
马 达
吸嘴
分辨率
速度, 位置反馈
串行指令
动 作控制基板
(XMP基板
JGRMB基板)
图5-2-2-1 MNLA贴装头用Zθ轴的控制方块图
Rev 2.00
动作说明书
5-
31
Zθドライバ
(電流アンプ)
モーション
コントロール基板
(XMP基板
JHRMB基板)
上位ホスト
コントローラ
(CPU基板)
CPCIバス
Zエンコーダ
θエンコーダ
Zシリアル指令
θシリアル指令
Z速度、位置フィードバック
θ電流フィードバック
Z電流フィードバック
θ速度、位置フィードバック
θモータ(IC)
Zモータ
ノズル
Z駆動U,V,W
θ駆動U,V,W
移動データ
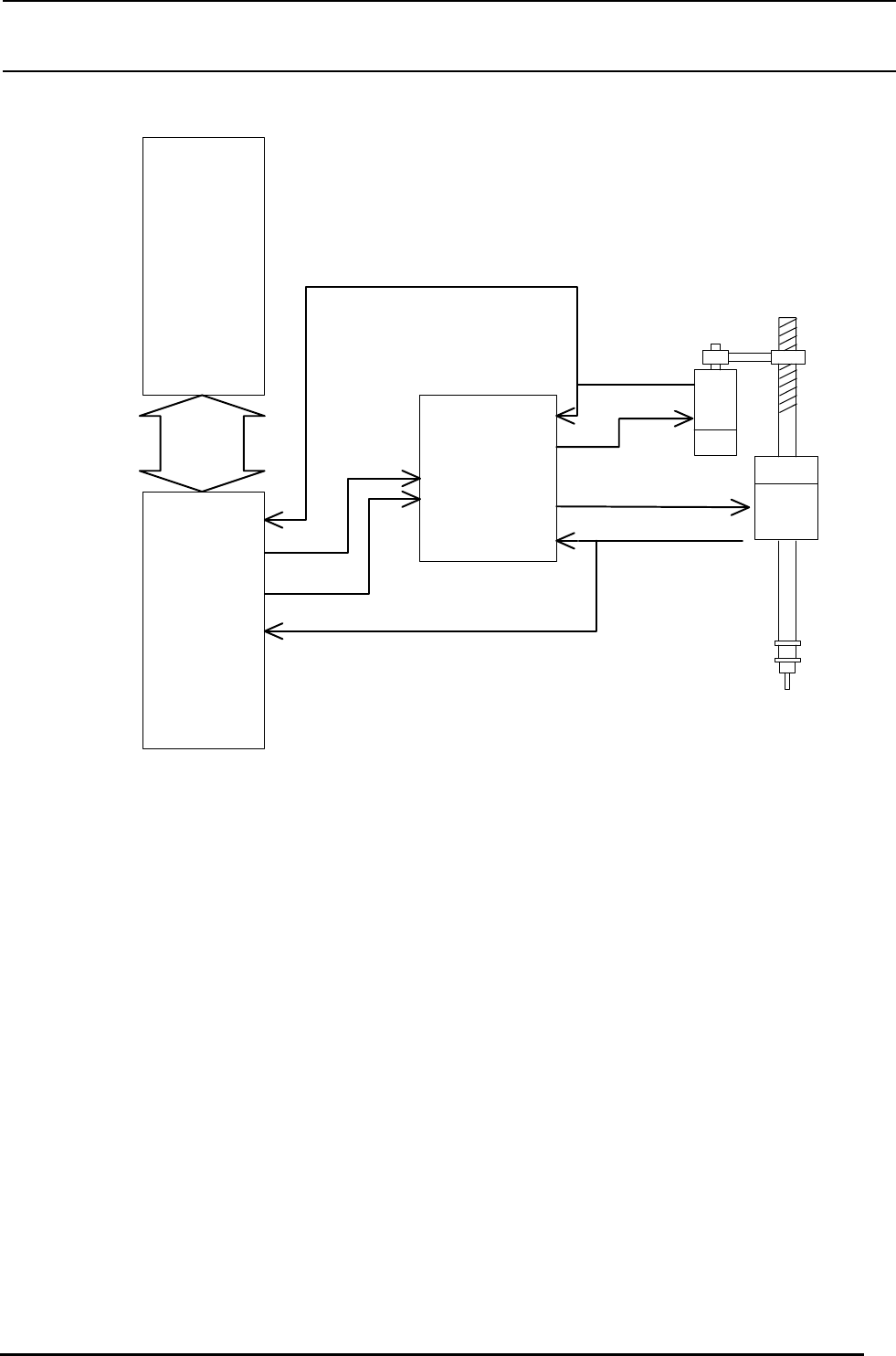
θ分解能:0.005°
Z分解能:1.00μm
图5-2-2-2 FM LA贴装头用Zθ轴的控制方块图
上位主控
(CPU 基板)
CPCI 母线
动作控制基板
(XMP 基板
JHRMB 基板)
Z 速度、位置供料器
Z 串行指令
θ 串行指令
θ 速度、位置反馈
θ 电流反馈
Z 马达
Z 変換器
θ 分辨率:0.005°
θ 马达(IC)
吸嘴
Z 分辨率:1.00μm
Z 驱动 U,V,W
Z 电流反馈
Zθ 驱动器
(电流放大器)
θ 変換器
移动数据
θ 驱动 U,V,W

Rev 2.00
动作说明书
5-
32
5-2-3 基板传送部的控制方式
① CENT马达
传送基板的CENTモータ使用步进马达,进行定速控制。
② BU马达
杀g嗯下移动后备台的BU马达,用步进马达和变换器进行控制定位。
③ 基板传送宽度自动调整马达
传送基板时自动进行调整的基板传送宽度自动调整马达,用步进马达和变换器进行控制定位。