CX-1_动作说明书.pdf - 第16页
R e v 2 . 0 0 动作说明书 3- 4 3-1-4 后备板的原点复位 向机台上方凸凹移 动 ( 传 感器 Off 方向 ) 向机台下方向 Step 移 动 ( 传 感器 On 方向 ) on START 原点 传 感器 原点 传 感器 ON 检测 零相 END off on on off 殊霞 向机台下方向凸凹移 动 ( 传 感器 On 方向 ) 原点 传 感器 ON off 检测
Rev 2.00
动作说明书
3-
3
⑤ Y 轴旋转。(对左右捕获位置的误差加上 X 轴垂直度的修正量后扭转)
注 1)Home 传感器从 ON 位置开始时,移动 5000 脉冲,移动到①的位置(Home 传感器 OFF 位置)之后,
进行上述动作。
注 2)Y 轴到③的动作结束,如果左右 2 个 HOME 传感器不能时,为异常。
注 3)以 YLHome 传感器 ON 位置为基准,在 1200 脉冲以内,可以进行 YRHome 传感器 ON 检测。
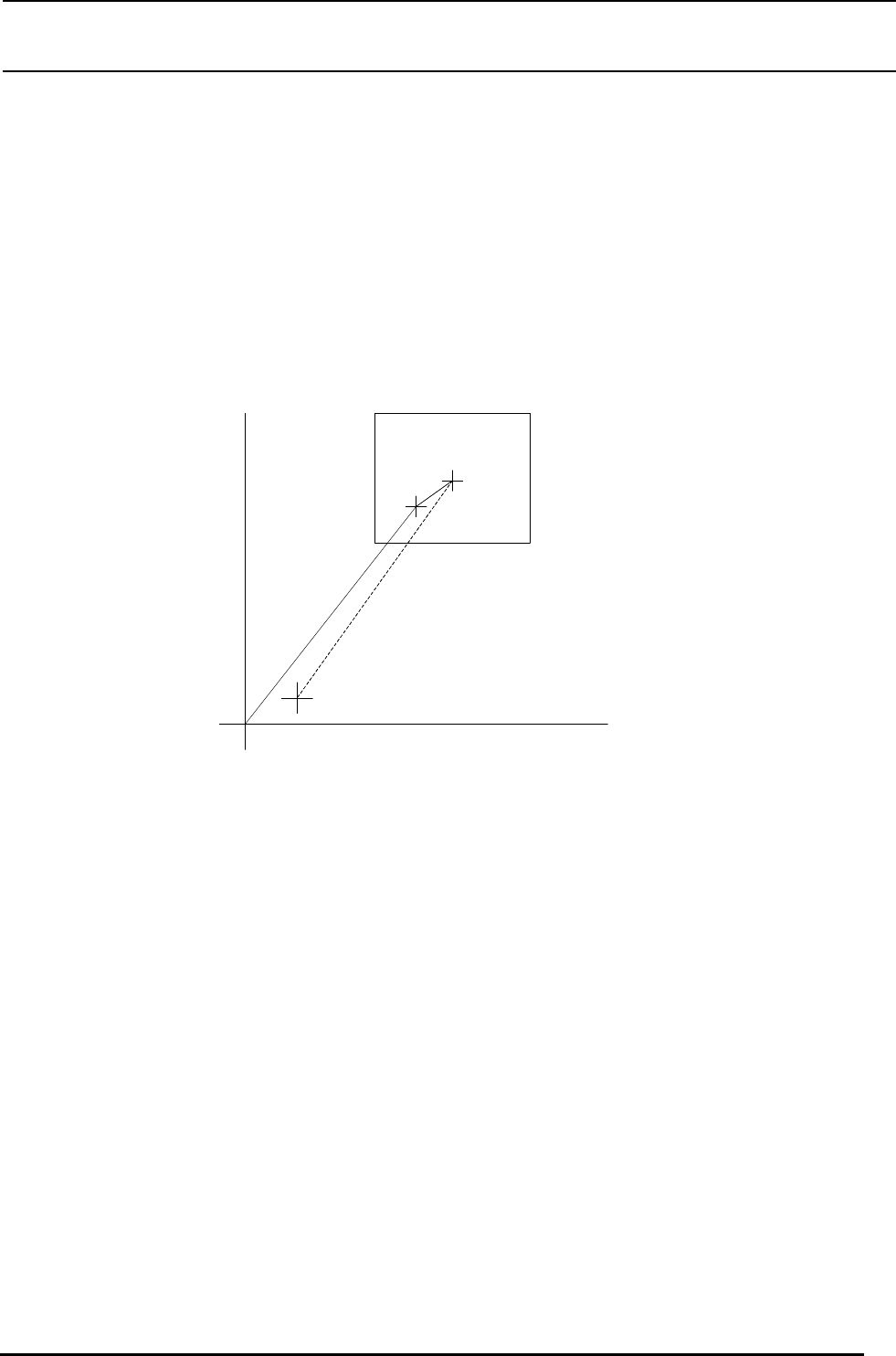
以 Home 传感器的捕获位置为基准,移动到 CAL 方块标记设计值的坐标,移动 CAL 方块标记识别坐标
的对称部分和机械原点。
CalBlock
譜柴峙恫炎
CAL圭翠炎崗議
紛艶恫炎
字亠圻泣
Home
勧湖匂
Y
X
移动到 CAL 方块标记设计值坐标后,作为「现在坐标=CAL 方块标记设计值坐标-CAL 方块标记识别
对称」。
注)在 CX1,XY 轴的 Home 传感器位置让 Ms 参数具有对称值,不用变更 Home 传感器位置,就可以
进行 CAL 方块的识别。
取得 Home 传感器位置的 Ms 参数时,机械 Pos 反映对称值,所以轴驱动器不识别。
Rev 2.00
动作说明书
3-
4
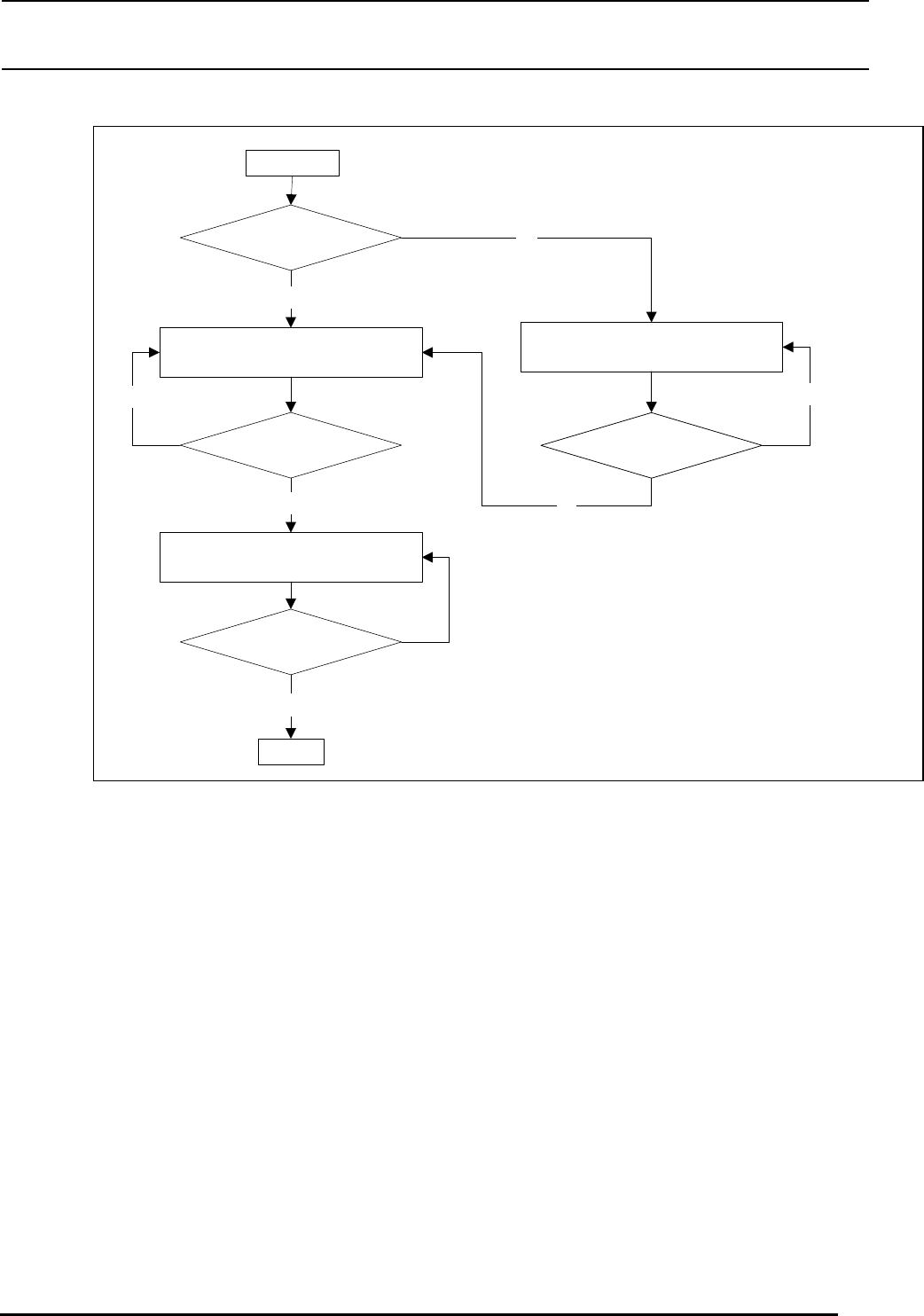
3-1-4 后备板的原点复位
向机台上方凸凹移动
(传感器Off方向)
向机台下方向Step移动
(传感器On方向)
on
START
原点传感器
原点传感器ON
检测零相
END
off
on
on
off
殊霞
向机台下方向凸凹移动
(传感器On方向)
原点传感器ON
off
检测
Rev 2.00
动作说明书
3-
5
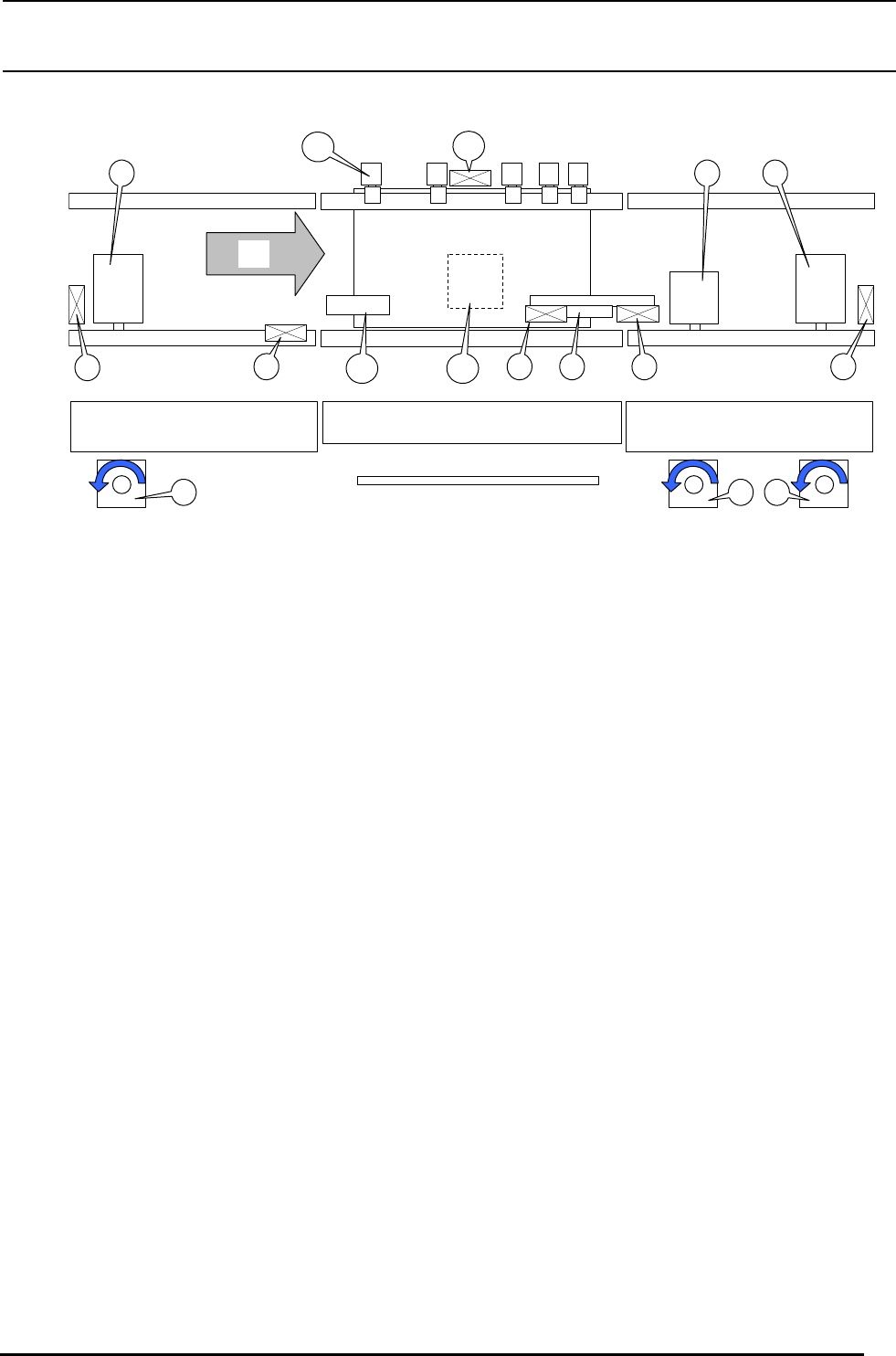
3-2 基板传送
1. IN马达(步进马达)
2. CENTER马达(步进马达)
3. OUT马达(步进马达)
4. IN传感器
5. WAIT传感器
6. STOP传感器
7. C・OUT传感器
8. OUT传感器
9. 止动器
10.X推进器
11. Y推进器
12. BU马达(步进马达)
13. BU原点传感器
A
1
1
3
32
2
4
5 6 9 7 8
10
11
13
12