CX-1_动作说明书.pdf - 第36页
R e v 2 . 0 0 动作说明书 3- 24 [6] 贴装下降时的 Z 轴动作 元件识别方式(LA, VCS) 按照检测有无元件方式 (LA, 真空). 行程分类为 3 种。(参照下表) 行程分类 LA ⎯ P 识别方式 VCS N P LA × { 检测有无元件 真空 { × 6-1 行程分类 N VCS 识别, Va 检测 XY → 基板 VCS 识别元件,用真空检测有无元件时,Z 轴的贴装下降为从 XY 移动高度下降。 移动…
Rev 2.00
动作说明书
3-
23
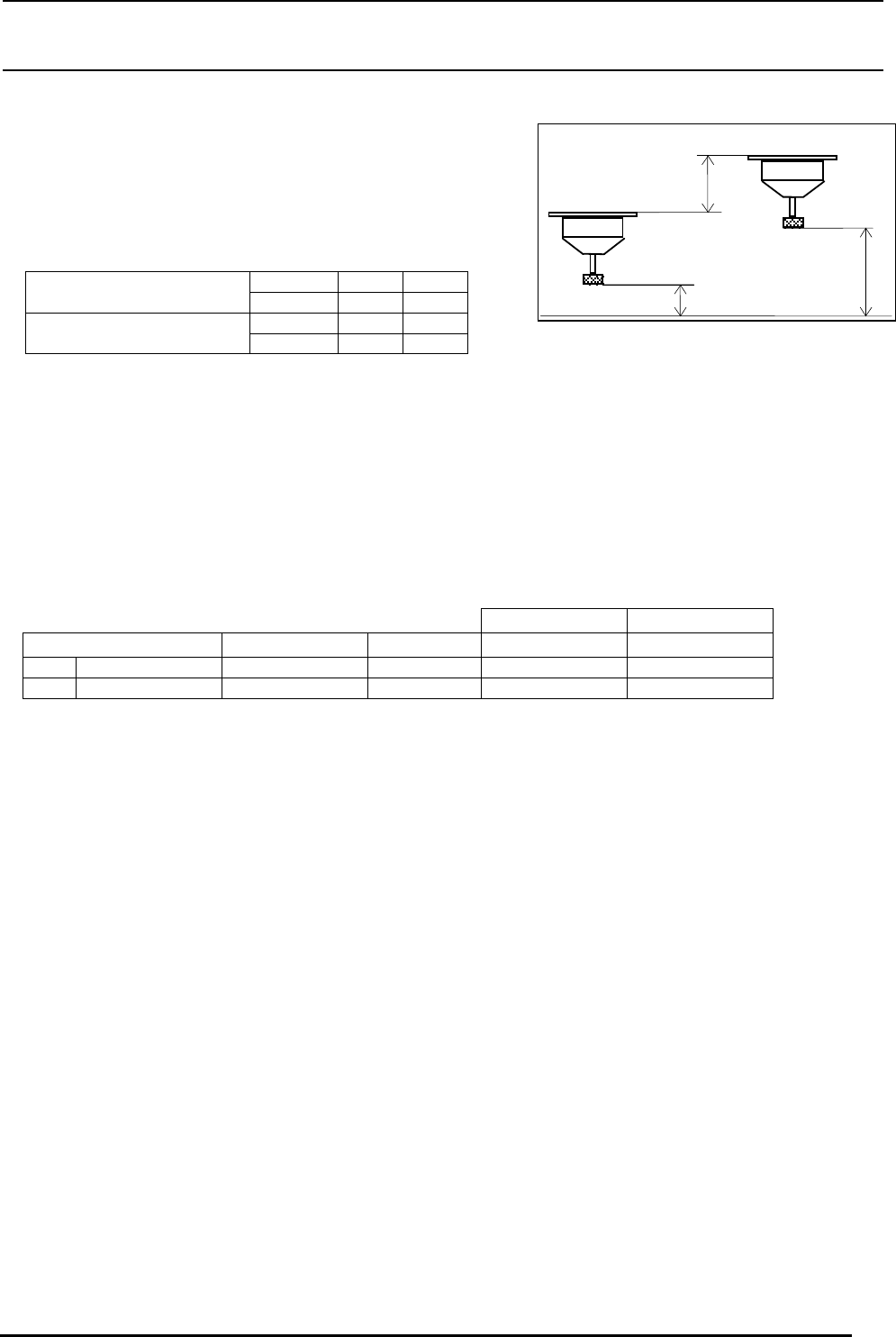
[5] 识别上升时的 Z 轴动作
按照检测有无元件方式(LA, 真空).行程分类分为
2 种。 (参照下表)
右图为行程分类 J。
行程分类
LA ⎯ ⎯
识别方式
VCS J L
LA × {
检测有无元件
真空 { ×
5-1 行程分类 J VCS 识别, Va 检测 VCS → XY
VCS 识别元件,用真空检测有无元件时,Z 轴的识别上升为向 XY 轴高度上升。
移动量 J=XY 移动高度α - VCS 识别高度γ
5-2 行程分类 L VCS 识别,LA 检测 VCS → LA
VCS 识别元件,用 LA 检测有无元件时,Z 轴的识别上升为向激光高度上升。
移动量 L=激光高度β - VCS 识别高度γ - h + t
5-3 各机种的 Z 轴行程
识别上升 识别上升
机种 元件高度规格 贴装头 J L
[1] CX-1 12 MNLA 14.0 22.1
[2] R 贴装头 12 FMLA 14.0 33.1
(注 1)高度为离基板上面的距离
(注 2)装有 R 贴装头选购件时
J
γ
α
识别高度 待机高度
Rev 2.00
动作说明书
3-
24
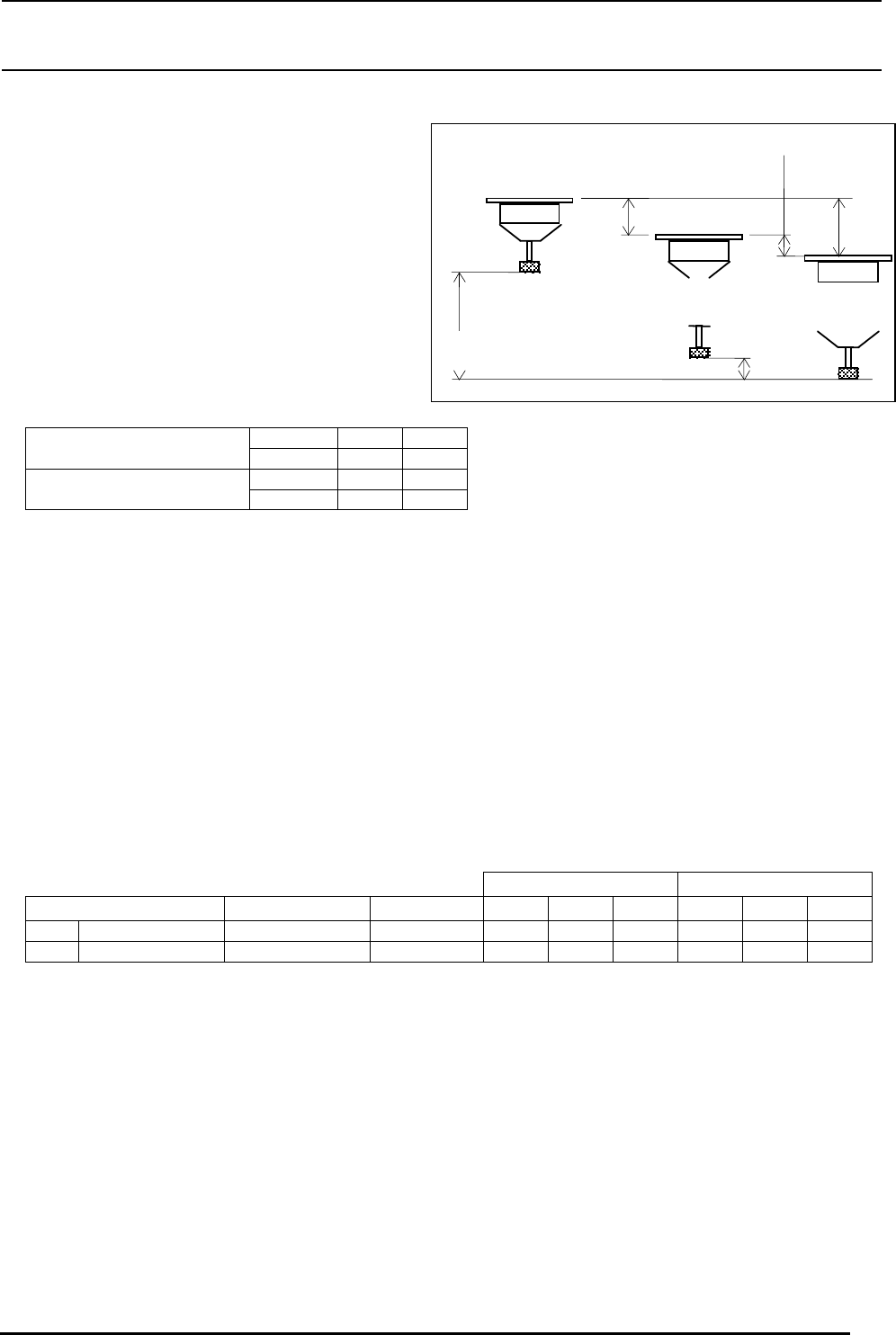
[6] 贴装下降时的 Z 轴动作
元件识别方式(LA, VCS)
按照检测有无元件方式 (LA, 真空).
行程分类为 3 种。(参照下表)
行程分类
LA ⎯ P
识别方式
VCS N P
LA × {
检测有无元件
真空 { ×
6-1 行程分类 N VCS 识别, Va 检测 XY → 基板
VCS 识别元件,用真空检测有无元件时,Z 轴的贴装下降为从 XY 移动高度下降。
移动量 N=XY 移动高度α + 贴装压入量
移动量 N1=XY 移动高度α - 2
移动量 N2=2 + 贴装压入量
6-2 行程分类 P LA, VCS 识别, LA 检测 LA → 基板
LA 识别元件或 VCS 识别元件,用 LA 检测有无元件时,Z 轴的贴装下降从激光高度下降。
移动量 P=激光高度β − h + t + 贴装压入量
移动量 P1=激光高度β - h + t - 2
移动量 P2=2 + 贴装压入量
6-3 各基种的 Z 轴行程
贴装下降 贴装下降
机种 元件高度规格 贴装头 N N1 N2 P P1 P2
[1] CX-1 12 MNLA 25.5 23.0 2.5 33.6 31.1 2.5
[2] R 贴装头 12 FMLA 25.5 23.0 2.5 44.6 42.1 2.5
(注 1)高度为离基板上面的距离
(注 2)装有 R 贴装头选购件时
N1
N2
2
N
α
待机高度
贴装高度
基板上面
Rev 2.00
动作说明书
3-
25
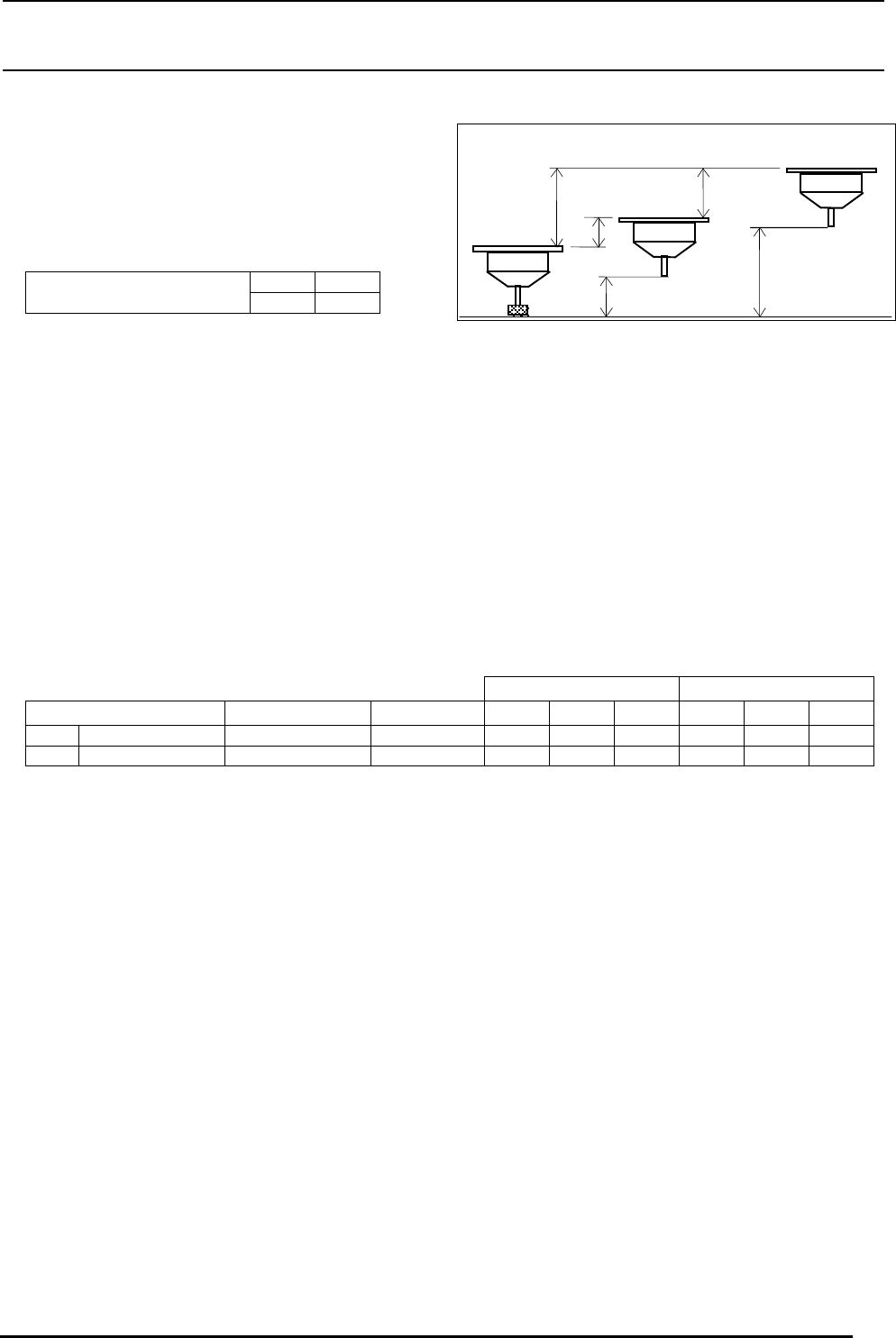
[7] 贴装上升时的 Z 轴动作
按照元件识别方式(LA, VCS)LA 检测有
无元件,行程分类为 2 种。.
右图为行程分类 Q。
行程分类
Q S
检测有无元件
× {
7-1 行程分类 Q 检测有无元件 基板 → XY
检测有无元件为无时,Z 轴的贴装上升为向 XY 移动高度上升。
移动量 Q=XY 移动高度α - h + 贴装压入量
移动量 Q1=2 + 贴装压入量 - h
移动量 Q2=XY 移动高度α - 2
7-2 行程分类 S 检测出有元件 基板 → LA
检测元件有无检测出有时,Z 轴的贴装上升为向激光高度上升。
移动量 S=激光高度β + 贴装压入量+ h - t
移动量 S1=2 + 贴装压入量- h
移动量 S2=激光高度β - 2 + 2h - t
7-3 各机种的 Z 轴行程
贴装上升 贴装上升
机种 元件高度规格 贴装头 Q Q1 Q2 S S1 S2
[1] CX-1 12 MNLA 24.7 1.7 23.0 33.6 1.7 31.9
[2] R 贴装头 12 FMLA 24.7 1.7 23.0 44.6 1.7 42.9
(注 1)高度为离基板上面的距离
(注 2)装有 R 贴装头选购件时
Q1
Q
Q2
2
α
贴装高度
待机高度