CX-1_动作说明书.pdf - 第19页
R e v 2 . 0 0 动作说明书 3- 7 3-2-1 传送 马达 传送方向在箭头状态 ( 左 → 右传送 ) ,马达转动方向为 CCW 。 速度分布图以三角驱动 ( 台形驱动 ) 来进行的。 ( X M P 没有被称为脉冲待发的控制,因此不能驱动指定脉冲率。) 速度的区分有高速· 中速· 低速 3 级, 以及在夹紧基板及再次夹紧时使用的预备送料 1· 预备送料 2。 并且,高速可以根据 MS 参数的设定切换到 400mm/s 或…
Rev 2.00
动作说明书
3-
6
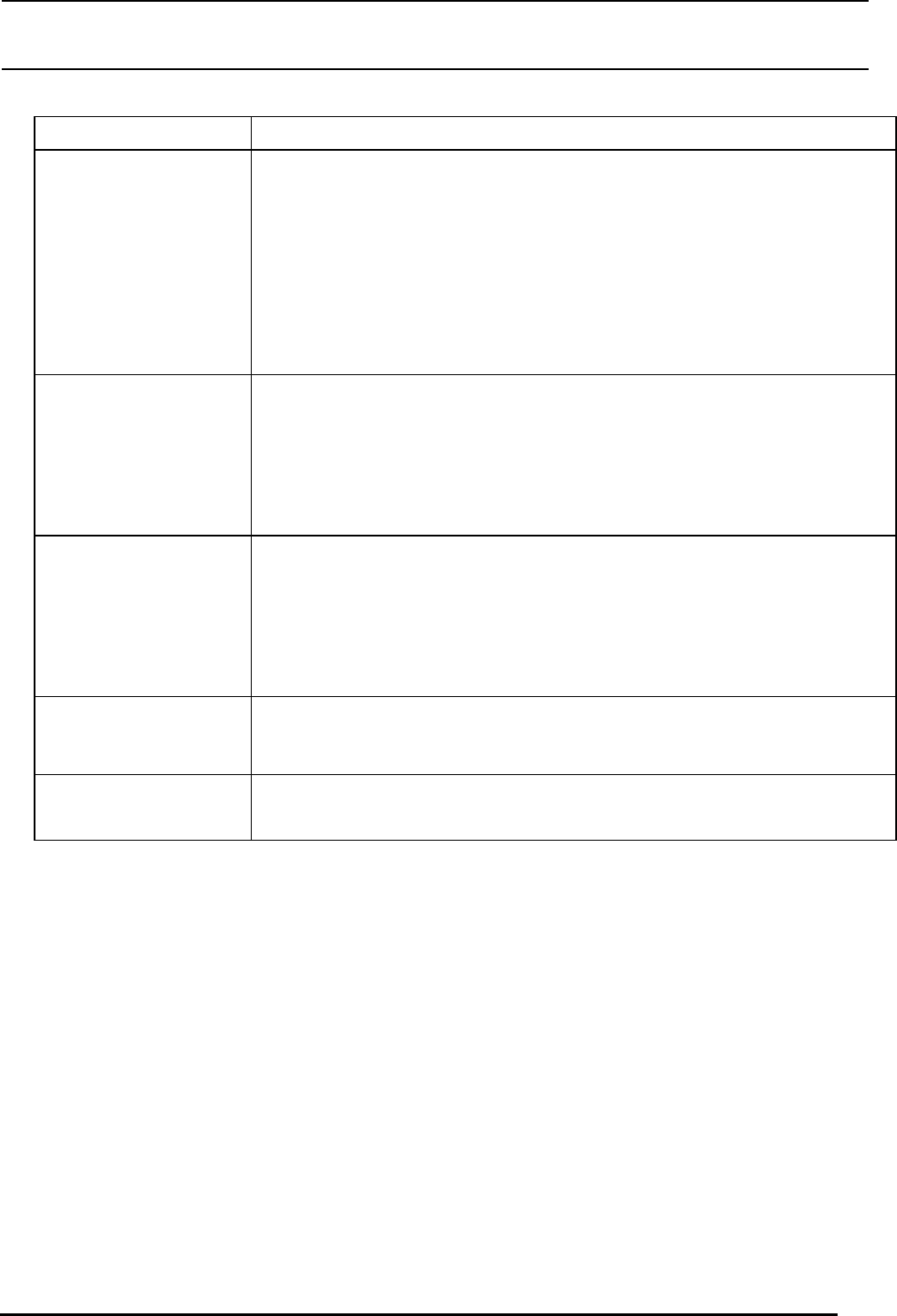
异常种类 内容
IN缓冲异常 1) IN马达ON后,IN传感器 3 秒以上ON。
2)IN 马达转动时,IN 传感器和 WAIT 传感器同时变为 ON。
3) IN 传感器 ON,从 IN 马达开始转动起 6 秒钟之后,WAIT 传感器也不 ON。
(有关时间,由机械控制参数决定)
4) 从 IN 缓冲向入口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
入口侧中心站异常 1) 入口侧中心马达连续转动 6 秒钟以上。
2) 入口侧 C・OUT 传感器 ON,入口侧 STOP 传感器 OFF->ON。
3) 从入口侧中心站向出口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
OUT缓冲异常 1) OUT 马达连续 6 秒钟以上连续转动。
2) 出口侧 C・OUT 传感器和 OUT 传感器通知变为 ON。
3) 从 ReadyIN(ON)信号检测向后续工程过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
后备异常 1) 后备马达上升结束时,T・PIN 传感器 ON(孔基准时)。
其他 1) 中心马达动作异常(由 XMP 决定)
2) 后备马达动作异常(由 XMP 决定)
Rev 2.00
动作说明书
3-
7
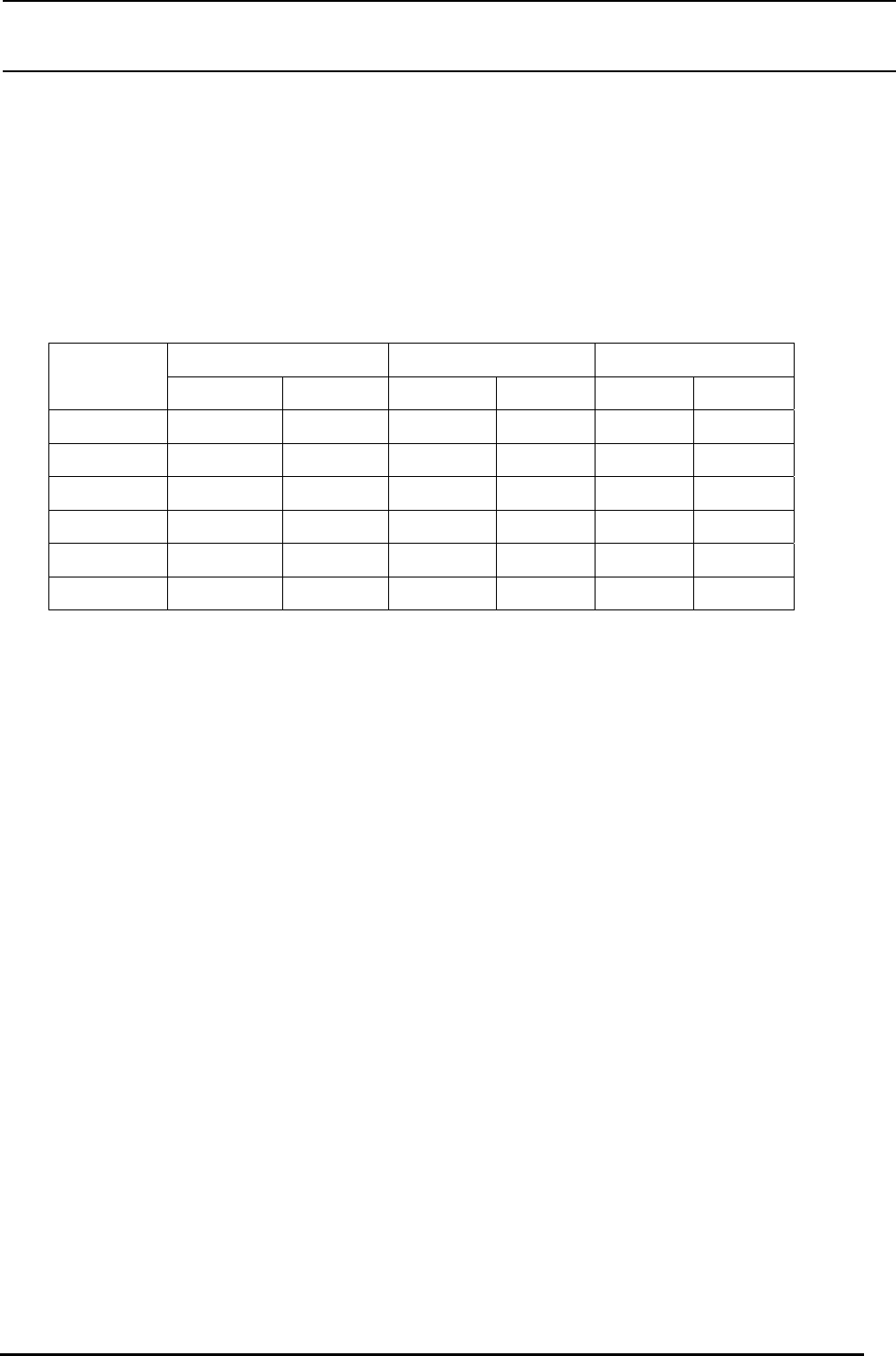
3-2-1 传送马达
传送方向在箭头状态(左→右传送),马达转动方向为CCW。
速度分布图以三角驱动(台形驱动)来进行的。
(XMP没有被称为脉冲待发的控制,因此不能驱动指定脉冲率。)
速度的区分有高速·中速·低速 3 级,以及在夹紧基板及再次夹紧时使用的预备送料 1·预备送料 2。
并且,高速可以根据 MS 参数的设定切换到 400mm/s 或 300mm/s。
分辨率为 252μm/脉冲,各速度分类值如下表所示。
最高速度 最高加速度 最高减速度
(mm/s) (pps) (mm/s
2
) (pps
2
) ( mm/s
2
) (pps
2
)
高速 400 1,587 1008.0 4,000 1008.0 4,000
高速 300 1,190 1008.0 4,000 1008.0 4,000
中速 200 794 1008.0 4,000 1008.0 4,000
低速 100 397 1008.0 4,000 1008.0 4,000
预备送料1 56 222 1008.0 4,000 1008.0 4,000
预备送料2 14 55 1008.0 4,000 1008.0 4,000
Rev 2.00
动作说明书
3-
8
3-2-2 BU机台
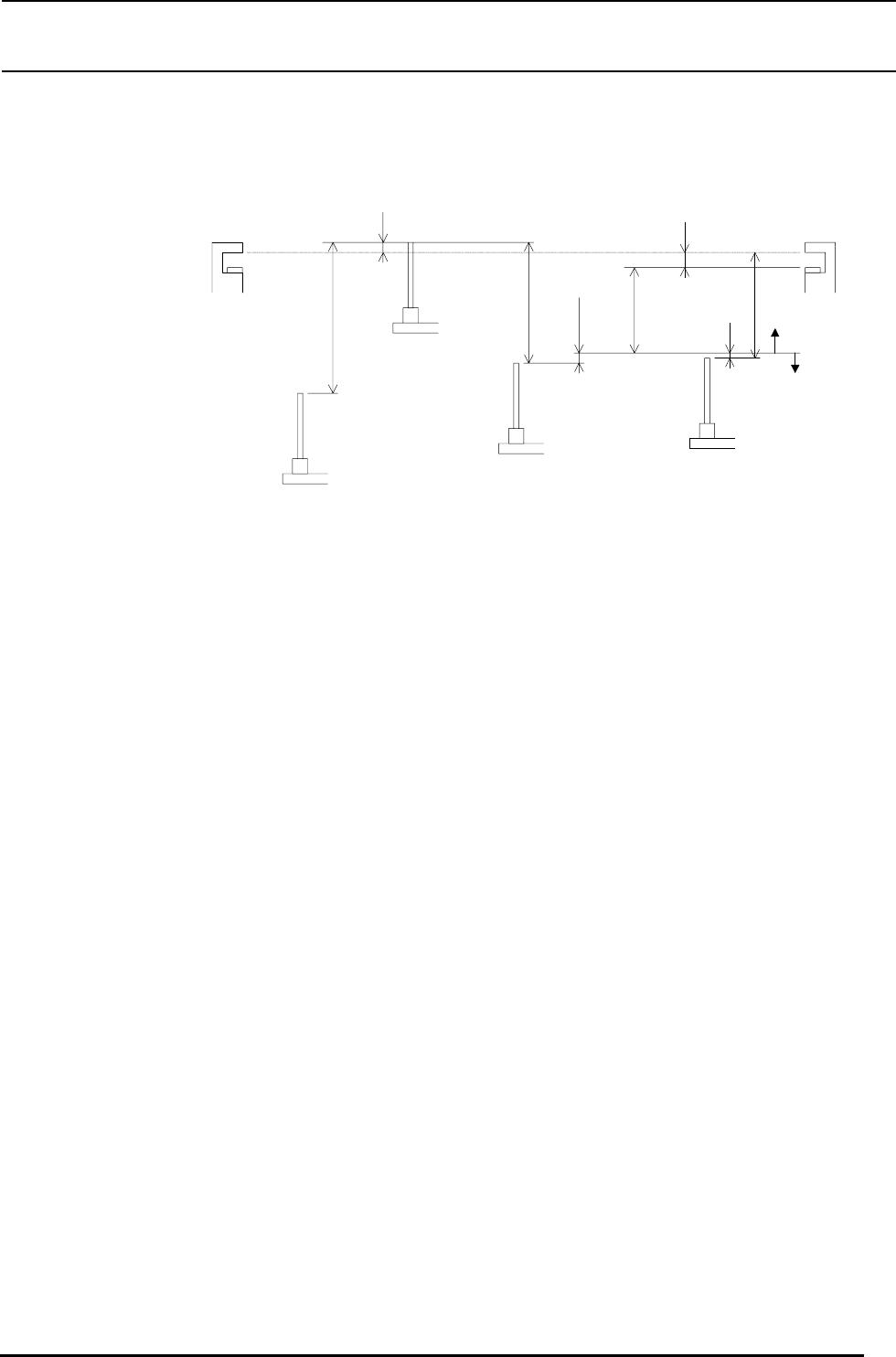
3-2-2-1 BU机台、机械控制以及有效行程
基板上面高度
0.5mm
5mm
有效行程 52.5mm
MS 参数输入
2 mm
7mm
40mm(最大)
最大基板下限制
字亠佩殻
59mm
④原点高度位置
B
(
原点传感器
ON
方向
)
A
(
原点传感器
OFF
方向
)
变换器检测零相
③软下方限制位置
①机械下方限制位置
②
字亠貧圭㏍㍉崙了崔
①:
下方向的机械限制高度
②:
上方向的机械限制高度
③:
在有效行程下限位置,是基板送入、送出时的待机位置。
有效行程上限位置从③的高度上升52.5mm上升位置、与②高度相同。
有效行程∶生产中可以驱动的行程范围
(注) 基板下限制可以在从5mm起40mm的范围,以1mm单位进行设定。
违反的基板下限制为40mm。
(注) ③的有效行程下限高度,根据基板下限而变化。
因此,有效行程也按下式变化。
有效行程(mm) =基板下限(mm)+5+7+0.5
基板送入·送出时的待机高度也同样变化。
以有效行程上限为基准高度
待机高度(mm)=基板下限(mm)+5+7