CX-1_动作说明书.pdf - 第115页
R e v 2 . 0 0 动作说明书 5- 27 5-1-13 SIGNAL CONVERT (信号变换)基板 本基板用来变换 CX-1 中使用的电磁标尺的信号。 在 CX-1 中,X、YL、YR 轴各使用 1 块信号变换基板,所以每台使用 3 块相同的基板。 具体的变换内容是,由于来自电磁标尺的警报信号是以 C-MOS 输出的,故要将该警报信号变换为差动, 向 SYNQNET 中继基板输出。 此外,还装有 2 个 LED,用于显示电…
Rev 2.00
动作说明书
5-
26
5-1-12 I-CX基板
本基板用于连接 CX-1 中追加的大部分电气功能,并进行控制。
因为已经比 CX-1 增加了向 IN 及 OUT 电机驱动器发出任意脉冲的功能和测力传感器等,所以本基板的
具体的作用是,控制测力传感器的放大器、把来自测力传感器的模拟信号变换成数字信号,这些都是
基本的使用功能。
除此之外,为配合个别 CX-1 的特殊设计要求,设置有 3 个 8 位通用接口或 1 个 RS-232C 接口、5 个
A/D 变换器的通道作为备用,能从短地址访问进行控制。
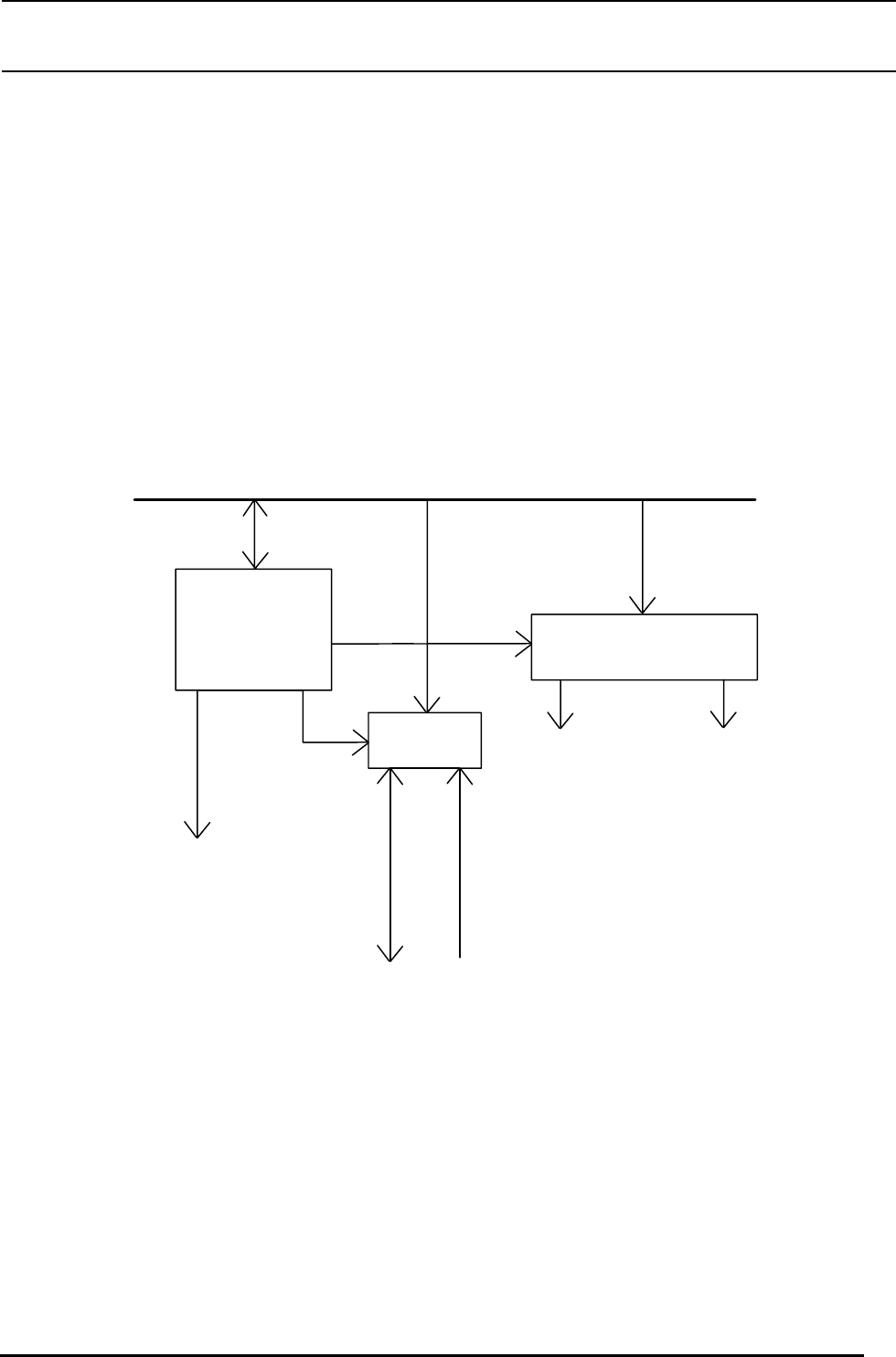
图 1 中列出了基板的方框图。
另外,方框图中所示的 CPLD 以及通用集成块 TE7760 的电源电压为 3.3V。3.3V 是由装在基板上的
DC-DC 变换器(5V→3.3V)所输出的,在这一 DC-DC 变换器尚未进行调整的状态下,由于输出电压不到
3.3V,基板不会工作。
VMEbus
ADDRESS DECODER
&
VMEbus CONTROLER
&
IONIZER CONTROL
(CPLD)
MOTOR PULSE CONTROLER
PCD4521
TE7760
IONIZER 1-6 CONTROL
LOAD CELL
ANALOG DATA
LOAD CELL AMP
CONTROL
MOTOR DRIVER1
MOTOR DRIVER2
图 1.I-CX 方框图
测力传感器
模拟数据
VME 总线
地址译码器
&
VME 总线控制器
&
电离器控制
(CPLD)
电离器 1-6 控制
地址 地址
TE7760
RS
-
232C
测力传感器
放大器控制
电机脉冲控制器
PCD4521
电机驱动器 2 电机驱动器 1
测力传感器
模拟数据
Rev 2.00
动作说明书
5-
27
5-1-13 SIGNAL CONVERT(信号变换)基板
本基板用来变换 CX-1 中使用的电磁标尺的信号。
在 CX-1 中,X、YL、YR 轴各使用 1 块信号变换基板,所以每台使用 3 块相同的基板。
具体的变换内容是,由于来自电磁标尺的警报信号是以 C-MOS 输出的,故要将该警报信号变换为差动,
向 SYNQNET 中继基板输出。
此外,还装有 2 个 LED,用于显示电磁标尺的电源供给和警报状态。
LED 状态
红灯:电磁标尺输出了警报信号时点亮
蓝灯:正常工作时点亮
熄灯:无电源供给
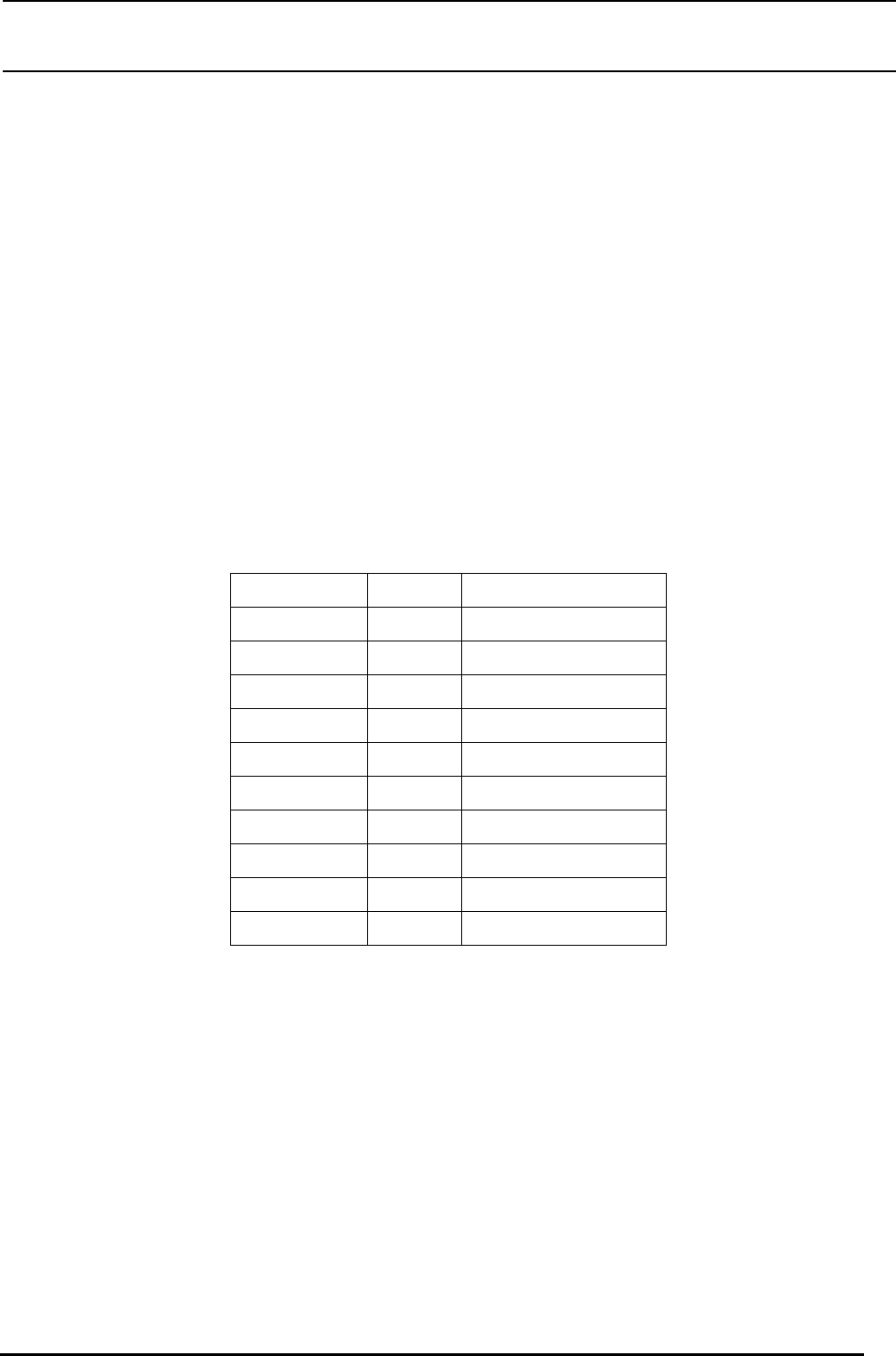
另外,还装有用于电磁标尺信号监视器的测试脚,接上测试仪器后就可以监控各相位的输出信号。测试
脚之位置与信号的关系如下表。
测试脚 No. 信号名 备注
TP1 警报
TP2 A
TP3 A_N
TP4 B
TP5 B_N
TP6 Z 仅 X 轴
TP7 Z_N 仅 X 轴
TP8 +5V
TP9 GND
TP10 N.C.
Rev 2.00
动作说明书
5-
28
5-2 马达的控制方式
5-2-1 XY轴的控制方式
C
X-1 系列,采用 XY 轴的控制方式,全十字还方式。这里说明原理。
XMP基板(JGRMB基板含む)
XY4軸ドライバ
①シリアル指令
16bit
モータ
U,V,W相の駆動電源
マグネスケールディテクタ
制御回路
制御回路
位置管理
カウンタ
偏差
カウンタ
⑤位置パルス
マグネ
スケール
センサヘッド
XY軸
移動方向
③磁気検出
ロータリー
エンコーダ
②速度検出
モータ
回転角度検出
④位置検出
速度检测
串行指令
XY 4
轴驱动器
XMP
基板
(
包括
JGRMB
基板
)
控制电 路
位置管理
计 数器
偏差
计 数器
马 达
转动角度检测
相 驱动电源
马 达
电 磁 标 尺
旋 转变换器
位置脉冲
电 磁 标 尺 测 定器
位置检
测
磁性检测
传 感器头
XY
轴
移 动 方向
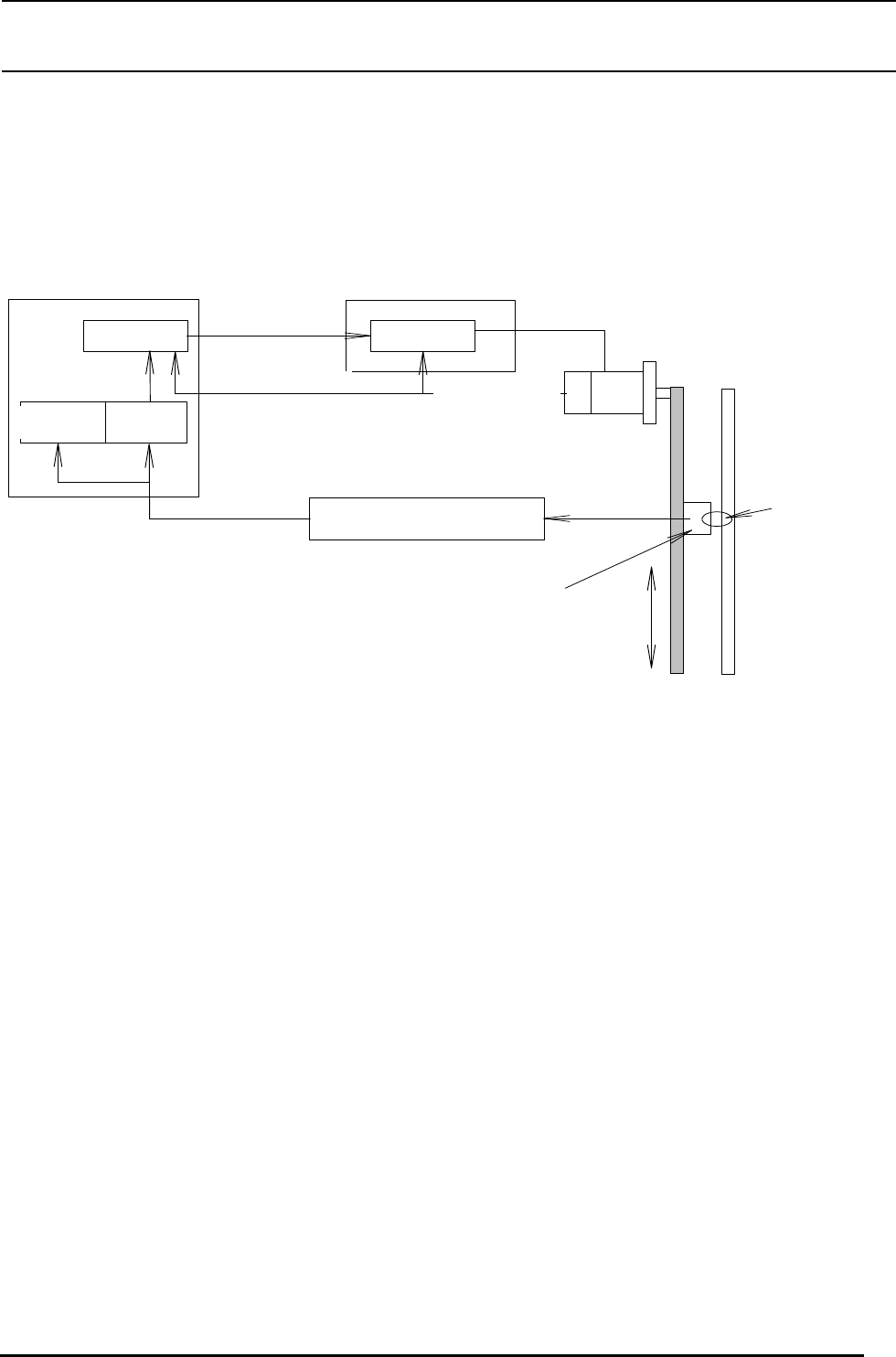
图 5-2-1 XY 轴全十字环方式
XY 轴全十字环方式如图 5-2-1所示。
这里举例说明把 XY 轴从原点移动+100mm时的情况。
1. 控制装置的CPU基板把 XY 轴的移动举例、加速·减速、最高转速、增益参数等数据设定到 XMP
基板,发出起动命令。
2. 此时,XMP 基板的位置管理计数器和偏差计数器值为 0。 XMP 基板根据这些数据编制速度方
式,线 XY4 轴驱动器发出①模拟指令。另外,XMP 基板的偏差计数器加算符合速度方式的计数器
值(串行指令)。
3. XY4 轴向马达供给适合串行指令的转举控制电路供电取动马达,马达转动。
4. XMP 基板计算旋转变换器的脉冲,检测马达转速(②检测速度),向①控制串行指令(速度控制),
让马达定速转动。
5. 另外,移动 XY 轴,电磁标尺的传感器检测③磁性检测(每800 μ m间隔的磁性体)。此传感器
头的④检测信号用电磁标尺分为 400 分(1脉冲=2 μ m),作为⑤位置脉冲,进行 XMP 基板的偏
差计数器供料反馈(减算),同时加算到位置管理计数器。
6. XMP 基板的偏差计数器输入了位置脉冲之后,偏差计数器进行(指令脉冲)-(位置脉冲)的运
算。控制电路一边确认此偏差值,一边通过①模拟指令控制 XY 轴的位置(位置控制)。 因此,XY
轴靠近目标位置100mm之后进行减速,XY 轴到达100mm之后,偏差计数器变为 0,串行指令