CX-1_动作说明书.pdf - 第94页
R e v 2 . 0 0 动作说明书 5- 6 5-1-2 XMP 基板 (RMB 基板 )、SYNQNET 连 接 基板 XMP 基板 X M P 基板与 RMB 基板 (JGRMB 基板和 JHRMB 基板 )一起 动作,是伺服马达和步进马达的控制基板。 XMP 基板最多可以控制 19 轴的马达。 ① 从 RMB 基板输出 16bit 的 串行指令,控制 XY 轴、 Zθ 轴的 AC 伺服马达。 XY 轴 : 用马达的旋转变换器控…
Rev 2.00
动作说明书
5-
5
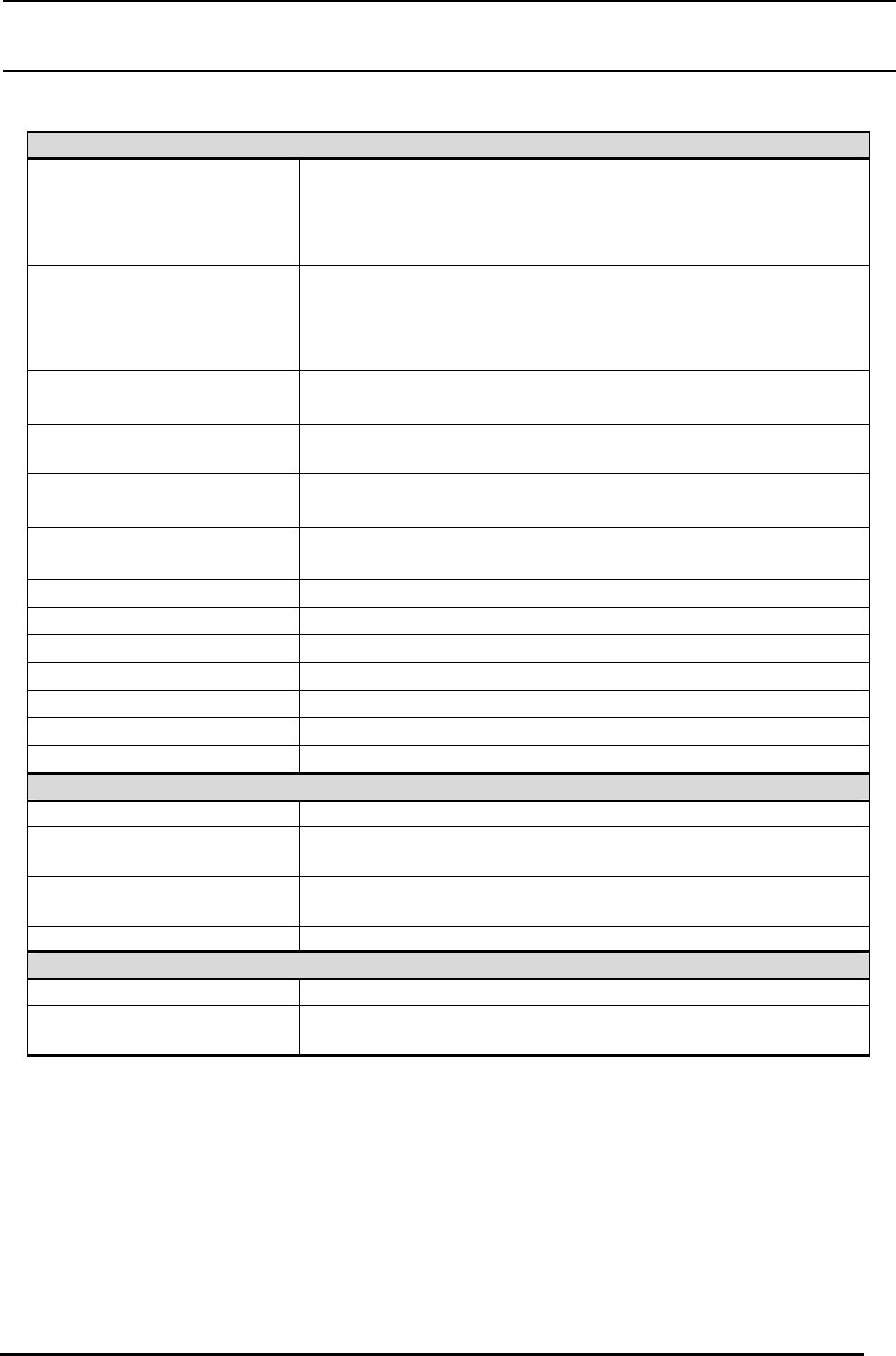
表5-1-1-2 “ACP-128J”CPU基板的主要规格
主要功能·设备
CPU RJ80535NC013512M (CeleronM 1.3Ghz⋅Intel)
但也可安装下列 CPU
RJ80535GC0251M (PentiumM 1.6GHz⋅Intel)
RV80536GC0332M (PentiumM 1.8Hz⋅Intel)
L2 Chache 512KByte on-die (CeleronM)
但
PentiumM-1.6GHz → 1MByte
PentiumM-1.8GHz → 2MByte
Chipset GMCH: RG82855GME (Intel)
ICH: FW82801DB (Intel)
Memory
※
1
备有 DDR DIMM 插座(184 针)1 个槽口
最大可扩展到 1GByte
System ROM SST49LF008A-33-4C-NHE (SST)
Flash EEPROM 1MByte
System BIOS GENERAL SOFTWARE Embedded BIOS
(写入 System ROM 内)
PCI to PCI Bridge Controller PCI2050PDV (T.I)
Super I/O LPC47S422QFP (SMSC)
LAN (PHY) DA82562ET (Intel)
CPLD
※
2
LC4256V-75T100C (Lattice)
Clock Generator CY28346ZC (Cypress)
RAS Controller
※
2
LM87CIMT
Panel Link (Transmitter) SII164CT64
Compact PCI 规格
总线规格 PICMG2.0 R3.0 标准(仅以物理形状为标准)
物理形状 Compact PCI 6U×8HP
(233.35mm×160.0mm·双槽口)
Hot Swap
∗
3
可向各槽口个别供给时钟脉冲
ENUM#信号监视(状态以及发生中断)对应※4
外部设备功能 不可(本板只作为主板动作)
动作条件
输入电源 +5V ± 5% (TYP 4.4A, Max. 8A)
使用环境 温度:0~50℃
※
5
湿度:20~80%
※
6
※1···不可使用 ECC
※2···仅为图示,元件未安装
※3···主板本身不可热切换
※4···标准规格时不可。可用选购件对应。
※5···CPU 降温装置应有 1.0[m
3
/min]以上的空气流(必需)
※6···应无结露

Rev 2.00
动作说明书
5-
6
5-1-2 XMP基板(RMB基板)、SYNQNET连接基板
XMP基板
X
MP基板与 RMB 基板(JGRMB 基板和 JHRMB 基板)一起动作,是伺服马达和步进马达的控制基板。
XMP基板最多可以控制 19 轴的马达。
① 从 RMB 基板输出 16bit 的串行指令,控制 XY 轴、Zθ 轴的 AC 伺服马达。
XY 轴 : 用马达的旋转变换器控制速度、计数线性标尺的脉冲,控制定位。
Zθ 轴 : 用马达的旋转变换控制器控制位置。
② 从 RMB 基板输出脉冲指令,控制中心马达、后备马达、自动宽度调整马达的步进马达。
③ 进行各轴的原点传感器和限制传感器的检测。
④ 伺服驱动器的警报检测、电磁标尺的警报检测。
⑤ 进行紧急停止开关的检测,瞬时停止 XY 轴、Zθ 轴。
⑥ 安装有 XY 轴、Zθ 轴以及后备马达 R 轴的位置管理用计数器。
SYNQNET 连接基板
SYNQNET 连接基板是 JGRMB 基板、SAFETY基板、CARRY连接基板以及各马达驱动器、线性标尺、
限制传感器间的信号连接基板。
① 中转XY 4 轴驱动器和XMP基板的信号。其中警报信号由被绝缘处理的图像探头向SAFETY基
板输出。
② 中转线性标尺和XMP基板的信号。警报信号也向SAFETY基板输出。
③
XY轴的限制传感器信号向 JGRMB 基板和SAFETY基板输出。 另外,还可以用FEEDER检测
传感器变换Y轴+限制传感器的FEEDER用、TRAY用。
④ 中转中心马达、后备马达、自动宽度调整马达的驱动器和XMP基板的信号(经由CARRY中转
基板)。
⑤ 后备马达、自动宽度调整马达的变换器信号(经由CARRY中转基板)向 JGRMB 基板输出。

Rev 2.00
动作说明书
5-
7
5-1-3 接口桥基板
接口桥基板与Compac
tPCI(以下称CPCI)接口和VME接口连接,是从CPCI向VME存取的基板。两个
接口连接的基板如下所示。
CPCI接口的基板
CPU基板、XMP基板、2 通道串行通信板
VME接口的基板
SAFETY基板、LIGHTCTRL基板、BASE-FEEDER基板、I/O CTRL基板、IP-X3基板、MCM
(L)基板、I-CX 基板、MCM(R)基板[R 贴装头选购件]
接口桥基板的功能
① “SCON”的绿LED
接口桥基板被设定到VME接口的系统控制器时亮灯。本机打开电源时时常亮灯。
② “RESET SW”的按键
复位此基板。
5-1-4 M
CM基板
本基板是元件中心用传感器(MNLA 或 FMLA[R 贴装头选购件])
。
的控制和演算基板
主控 CPU 的 I/F,经 VME 接口→接口桥基板→CPCI
。
接口经路来进行 传感器的连接,包括电源的同轴电
缆 1
。
根进行专用串行通信 然后,位进行元件位置测定的 θ 马达变换器信号由 Zθ
。
驱动器供给
MCMR 基板有 MNLA 用(4 轴)和 FMLA 用(1 轴)2
。
种 MNLA 用(4 轴)具有 4 根轴的独立演算电路,FMLA 用(1
轴)的 MCMR 基板是从 MNLA 用(4 轴)的基板中去除 3
。
根轴的电路 因此,可用 MNLA 用(4 轴)的 MCMR 基
板来代替 FMLA
。