SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第106页
1 - 38 S tudent Guide SIPLACE HF/HF3 3 Kommunikation und S teuerung Ausgabe 09/2005 38 3.4.2 Achsdynamik -Grundsätzliches- Jede Achse startet an einer S tartposition mit ei ner (vom Achscontrolller vorberechneten) Beschl…
1 - 37
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
37
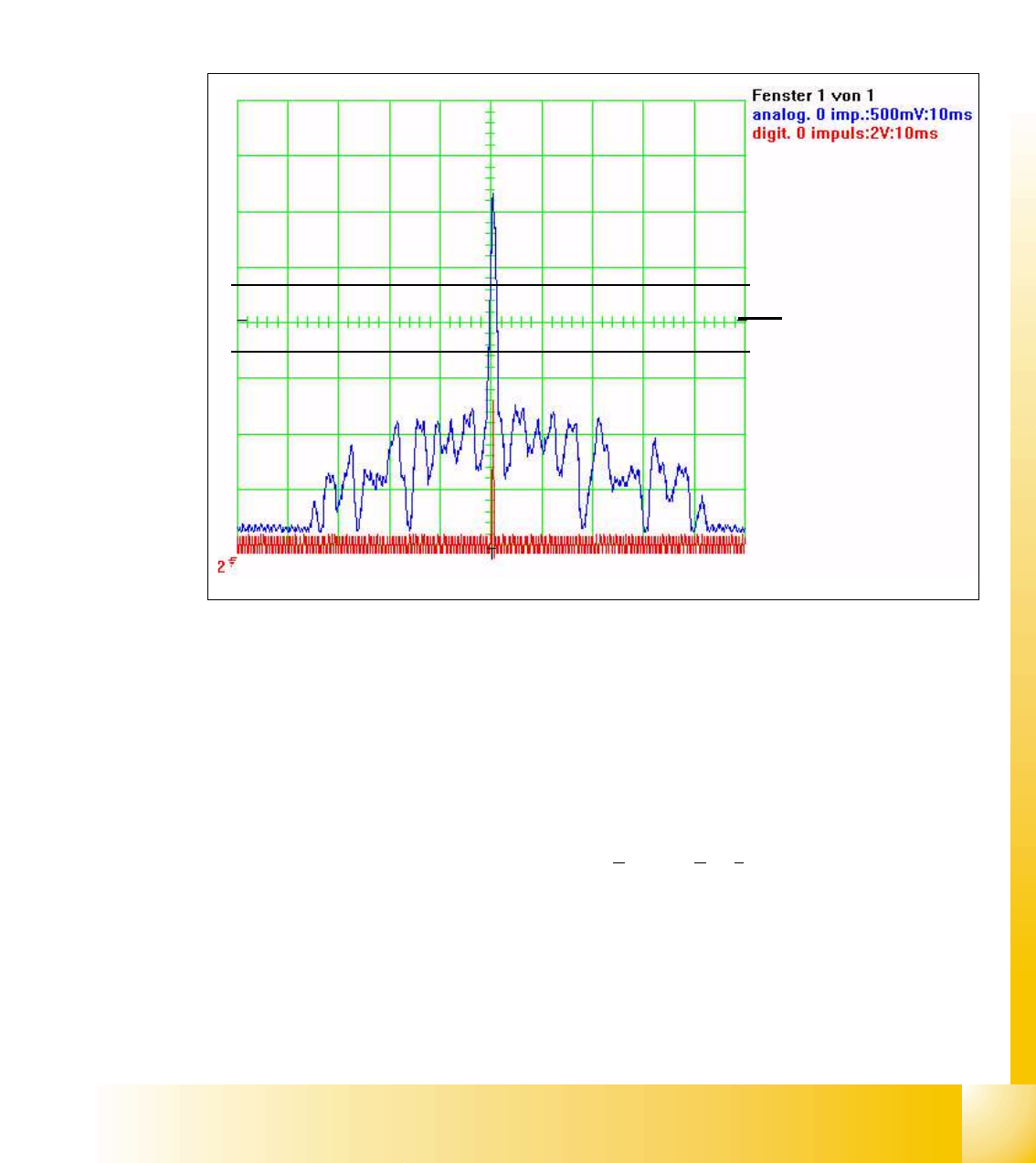
3.4.1.2 Nullimpuls des Spursignalgebers
Jedes Inkrementalmesssystem benötigt zu Beginn eine Initialisierung. Das heißt jede Achse führt
einen Achsreferenzlauf aus.
Beim Referenzlauf sucht jede Achse eine bestimmte Position - die durch das Nullimpulssignal er-
kannt wird. Das Nullimpulssignal ist ein analog Signal das durch eine ’Schmitt Trigger’schaltung
digitalisiert wird.
(Messen des Analogsignals durch einstellen der ’Nullinie’ auf die Bildschirmmitte)
Fig. 3.4 - 3 Analoges und digitales Nullimpulssignal (analoge ’Nulllinie’auf Monitormitte gestellt)
Bei etwa 2.5 V erzeugt die ’Schmitt Trigger’schaltung einen kurzen hohen Impuls- den ’Nullimpuls’
des Positionsmesssystems. Ist der Encoder zu nah an den Massstab montiert könnte einer der
Nebenimpulse die ’Schmitt Trigger’schwelle überschreiten und somit fehlerhaft als ’der’ Nullim-
puls erkannt werden. Das heißt dieser ’Nullimpuls’ ist an einer falschen Position des Portals er-
kannt worden. An der HF-Maschine führt dies zu einen LP-Offset. (An S oder HS Maschinen führt
dies zu einem Bestückoffset.) Der digitale Nullimpuls ist am Kopf- Portal-Interface mit einem Tast-
kopf an Pin 8 des Teststeckers zu messen.
Am Nullimpulsausgang der Achstestbox (oder des S
IPLACE AchsTesters SAT) ist der invertierte
Nullimpuls zumessen.
3
Der analoge Nullimpuls
muß 0.3 V größer als die
Triggerschwelle für den
digitalen Nullimpuls sein.
Schmitt Trigger Schwelle
Nebenimpulse (Störsignale)
sollen den Grenzwert 0.3 V
kleiner als Triggerschwelle
nicht überschreiten
1 - 38
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
38
3.4.2 Achsdynamik -Grundsätzliches-
Jede Achse startet an einer Startposition mit einer (vom Achscontrolller vorberechneten) Beschl-
eunigung einer konstant Geschwindigkeitsphase und einer Verzögerung bewegt sich die Achse
in ihre Zielposition. Die dynamische Bewegung der Achse an der HF Maschine wird komplett dig-
ital gesteuert. Ein leistungsfähiger Prozessor stellt kontinuierlich die Achsdynamik auf den aktu-
ellen Achszustand ein. Das bedeutet alle Einstellmöglichkeiten für Geschwindigkeit (Tacho) und
Positionierqualität (P-Anteil) am Servoverstärker sind entfernt. Die Steuersignale dieser neuen
Achsansteuerung sind unterschiedlich zu den bisher gewohnten Signalverläufen.
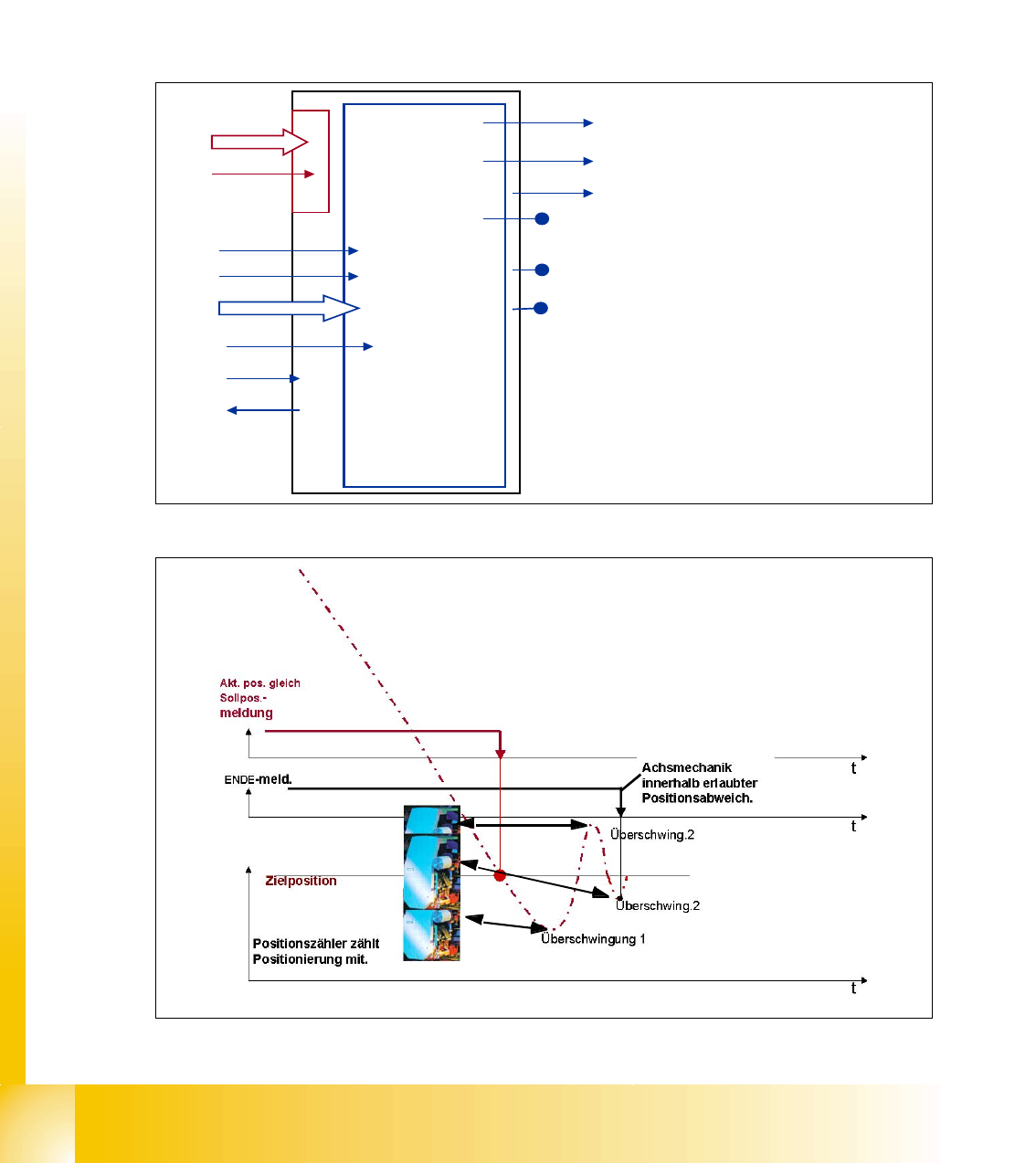
Fig. 3.4 - 4 Digital gesteuerte Achse der HF-Maschine
Fig. 3.4 - 5 Positionierung mit Überschwingung in die Zielposition
E für L ichtschranke unten
Servo Ready
Positionsdaten
Freigabe
Spursignale
K raftwerte
Steuersignal 1 Servo
Steuersignal 2 Servo
Servo ON
Strommesspunkt
unkommutierter Stromsollwert
‘V
nominal
‘ ausgang Motorstrom-S ollsignal
‘K raft’aus gang Motors trom -S olls ignal
Endemeldung
Achs
control-
ler
Haupt-
platine
VC 3 controller
Zusatzplatine
"3"
"-8"
"15"
1 - 39
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
39
Hinweis:
Das Positionsabweichungssignal zeigt die Positionierqualität jeder Achsbewegung in die Zielpo-
sition. 3
Bei der 1. Positionierung in die Zielposition triggert das ’Istposition gleich Sollpositionssignal’ die
Überschwingzählung der Achstestbox (SAT) für das Positionsabweichungssignal.
Ist die Überschwingung größer als die erlaubte Positionsabweichung dieser Achse wird die Ende-
meldung verzögert bis die Abweichung durch einen Regelvorgang innerhalb des erlaubten Berei-
ches bleibt.
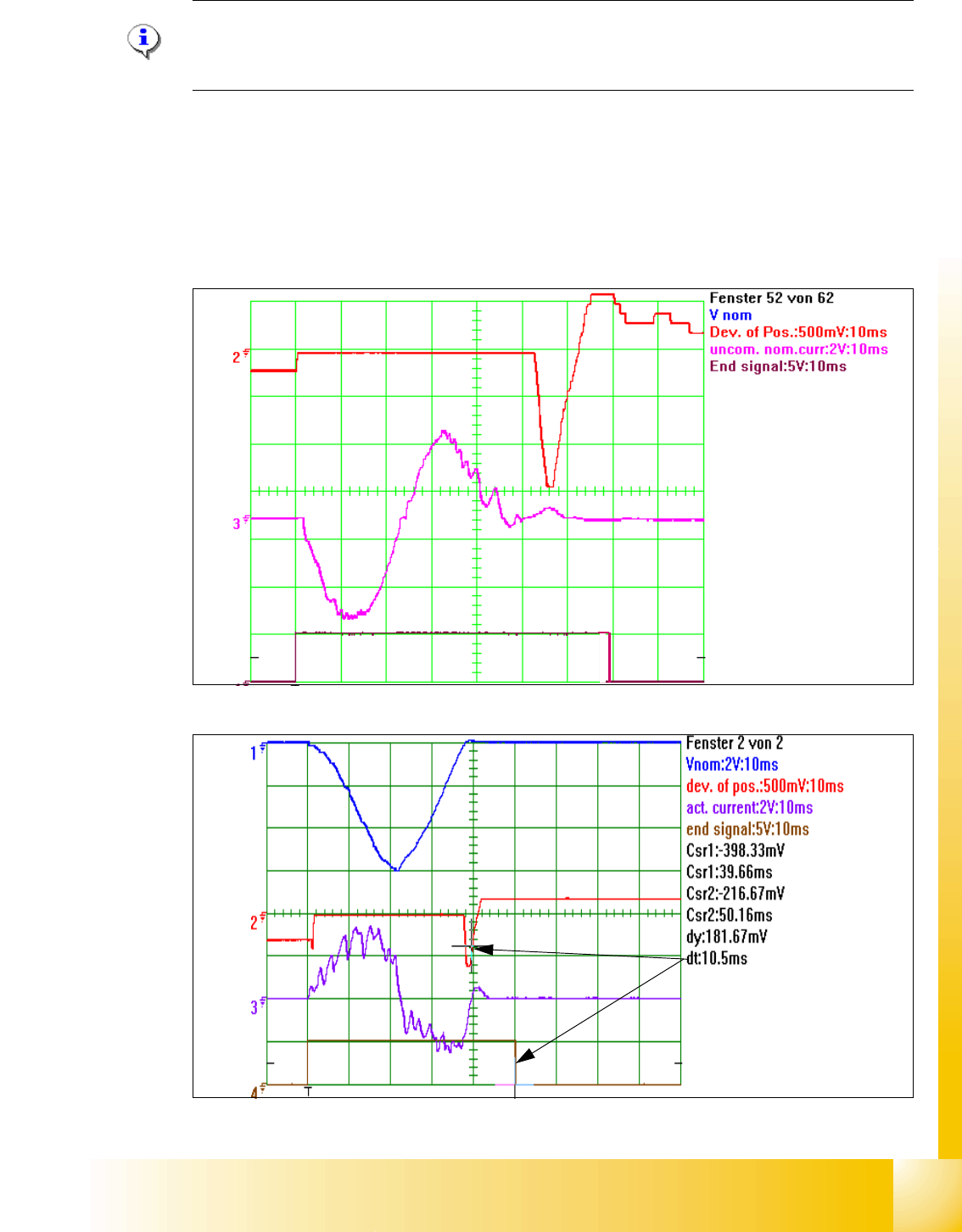
Fig. 3.4 - 6 Die 2te Überschwingung setzt die Endemeldung
Fig. 3.4 - 7 Positionierung mit asymtotischer Annäherung nach einer 1. zu großen Überschwingung
1
2