SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第223页
1 - 29 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2 29 6.3 Bestückablauf Abhol-und Bestückzyklus des Collect & Place-Kop f (DLM2) 6 6.3.1 Arbeit spositionen am Bestückkop f Abb. 6.3 -…
1 - 28
Student Guide SIPLACE HF/HF3
6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005
28
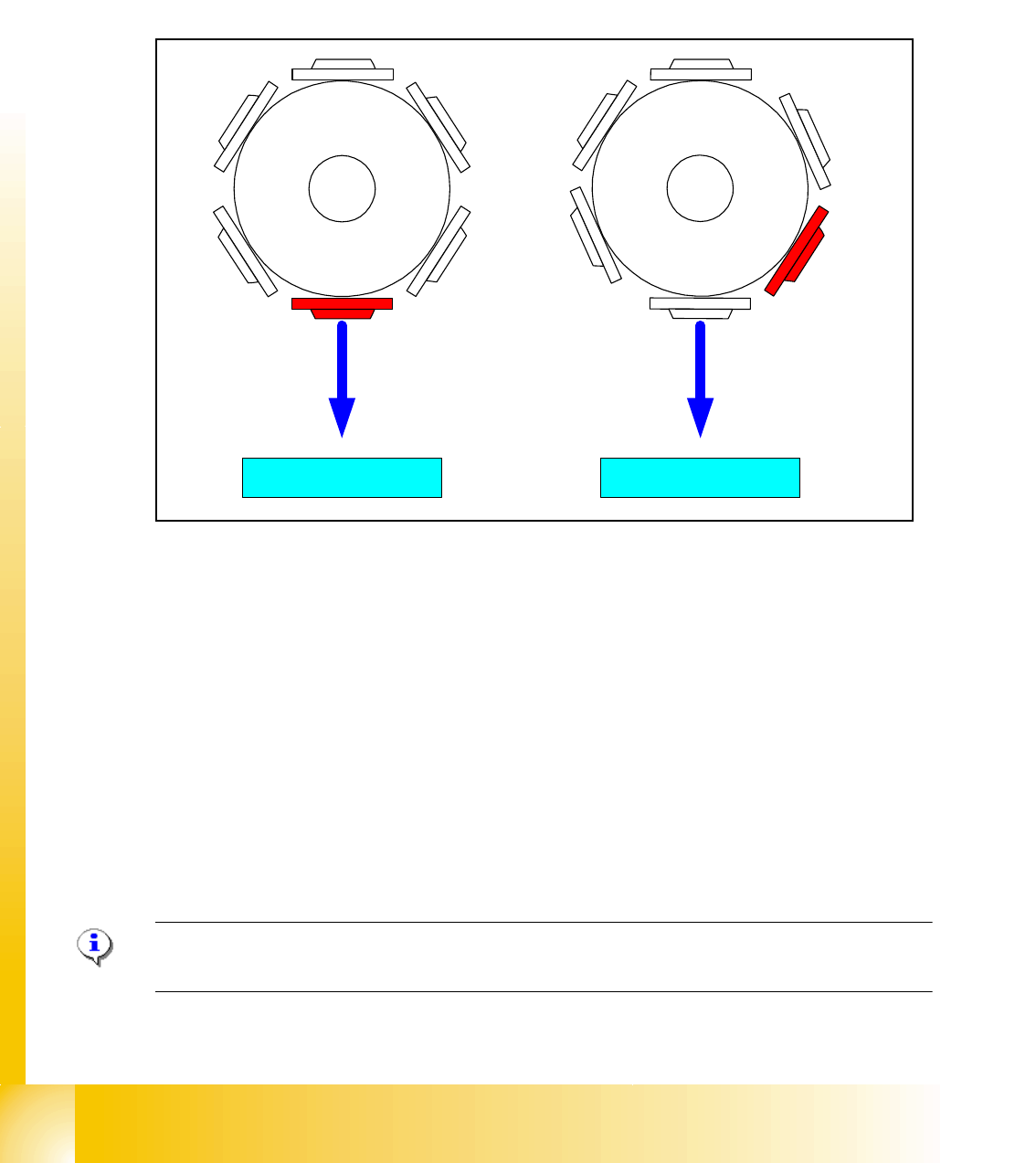
6.2.12 Höhenreferenzlauf
Mit dieser Funktion wird geprüft, ob die Pipette korrekt auf der Pinole sitzt und der richtige Pipet-
ten-Typ verwendet wird, der auch programmiert ist.
Die Pipettenlänge wird herangezogen, um die Abhol- und Bestückhöhe für die nächsten Bestü-
ckungsvorgänge zu berechnen.
Dieser Höhenreferenzlauf ist von der Pipettenlängenmessung im BE-sensor völlig unabhängig!
Abb. 6.2 - 12 Pipettenhöhe messen
(1) Oberkante der festen Transportseite
(2) Erster Schritt mit Segment 1 zur Messung der Pipettenhöhe.
(3) Letzter Schritt mit Segment 6 (12) zur Messung der Pipettenhöhe.
– Das Portal verfährt die Bestückungsköpfe über die feste Transportseite.
– Die Z-Achse verfährt nach unten und alle Pipetten berühren die Transportschiene.
– Pipette 1 bestimmt die Referenzlänge.
– Alle Segmente werden gemäß ihrer jeweiligen Länge bezogen auf Pipette 1 gemessen.
– Die maximale Längentoleranz beträgt 0,4 mm: Ist der Längenunterschied zu groß, wird eine
Fehlermeldung angezeigt.
Hinweis
Ausnahme: spezielle Pipetten mit der Nr. X9X werden nur gemessen (keine Längenangaben).
4
1
5
2
3
6
4
1
5
2
3
6
1
23
1 - 29
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
29
6.3 Bestückablauf
Abhol-und Bestückzyklus des Collect & Place-Kopf (DLM2) 6
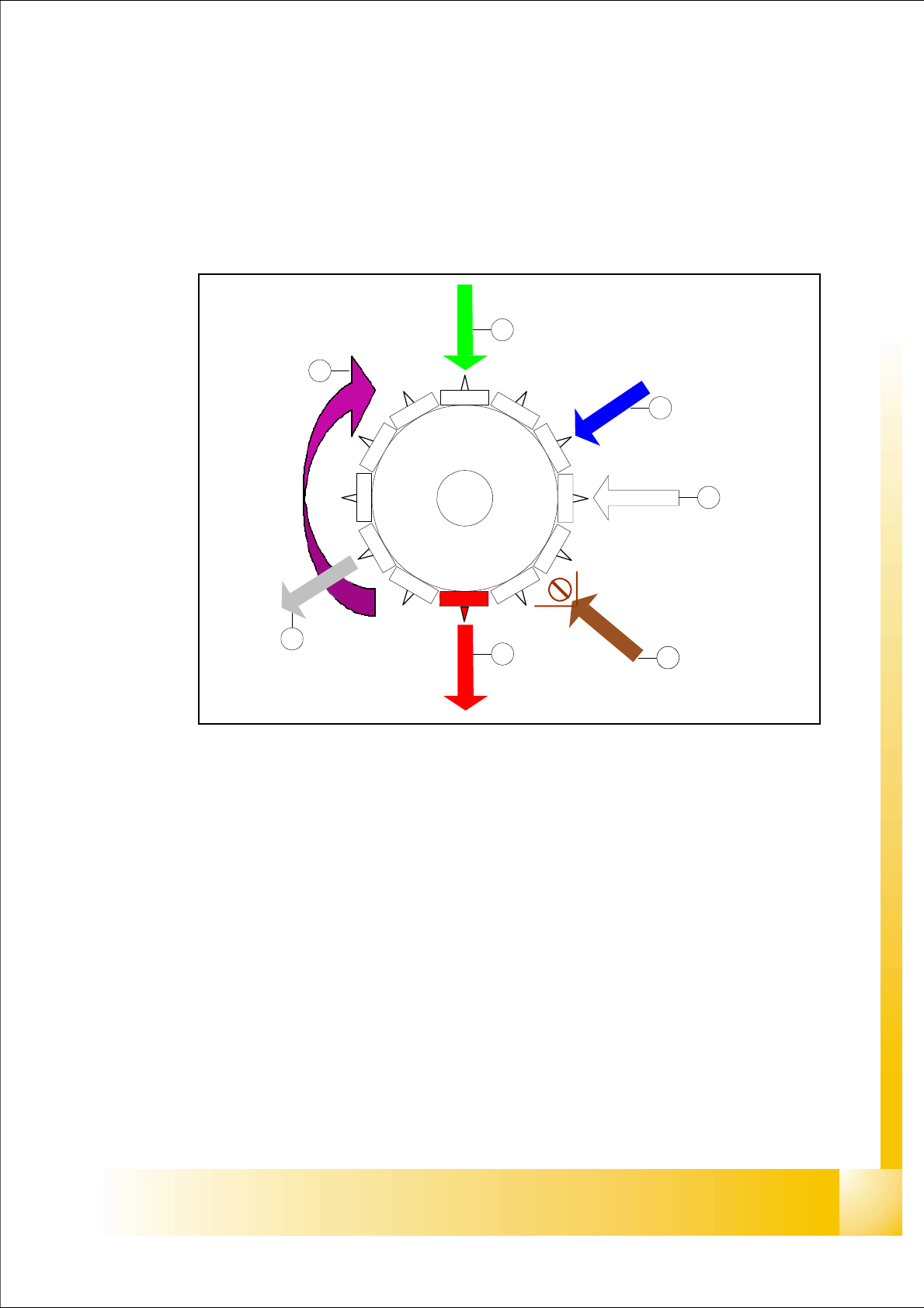
6.3.1 Arbeitspositionen am Bestückkopf
Abb. 6.3 - 1 Arbeitspositionen am Bestückkopf
Legende
(1) Optische Zentrierung
(2) Drehstation
(3) Serviceposition für Segment: Überprüfen/ entfernen Pipetten.
Entfernen der Pinolen (speziell beim 6er Kopf) auf der anderen Seite
(4) Abhol-/Bestückstation und Abwurfposition
(5) Abwurfposition bei S27HM und HS 60
(6) Arbeitsrichtung
(7) Position der BE-Sensor-Option
12
1
1
1
0
9
8
7
6
5
1
2
3
4
1
2
3
4
5
6
37
1 - 30
Student Guide SIPLACE HF/HF3
6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005
30
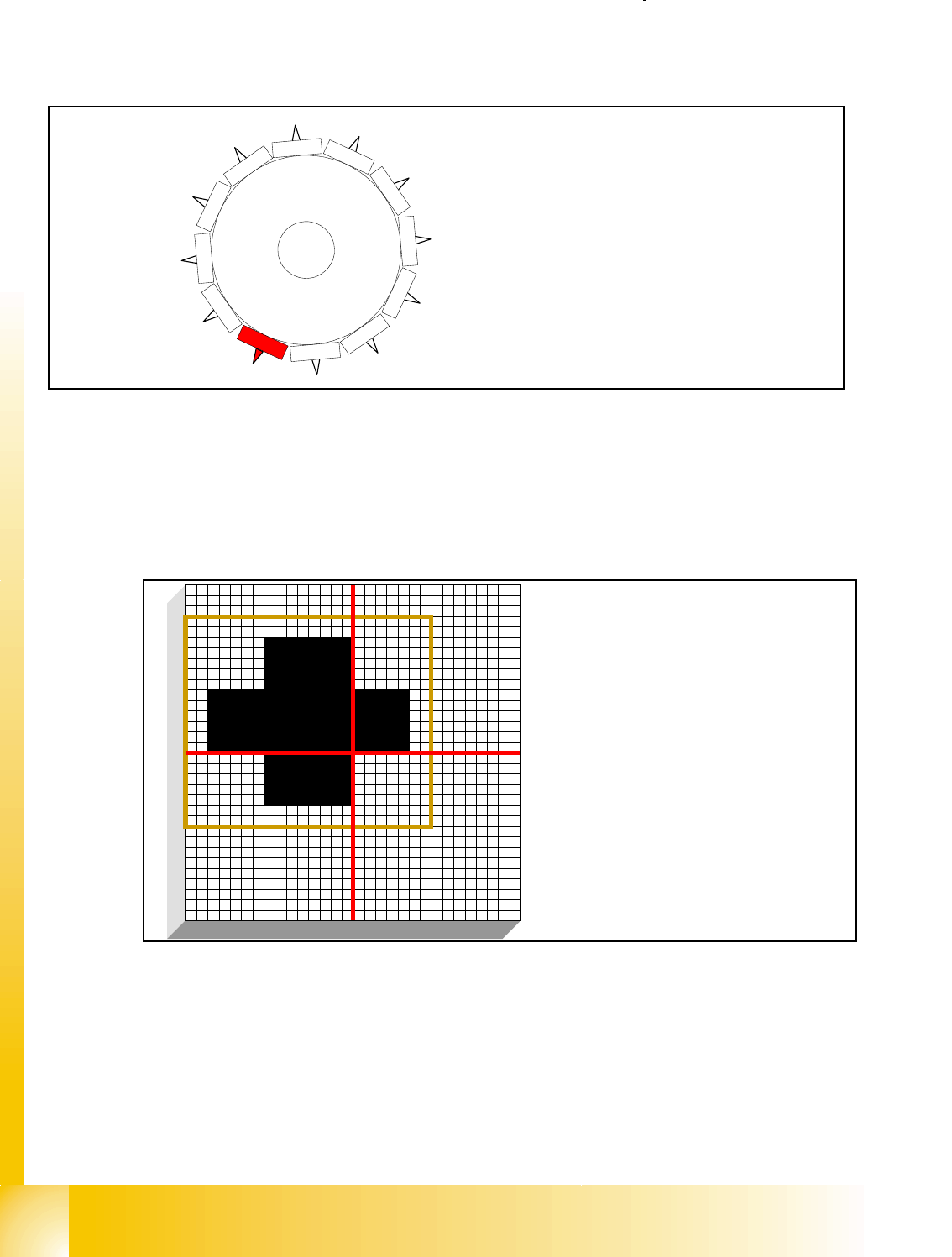
6.3.2 12-Pipetten-Collect & Place-Kopf in Grundstellung 15
°
Abb. 6.3 - 2 12-Pipetten-Collect & Place-Kopf in Grundstellung 15°
Dies ist die Grundstellung des 12-Pipetten-Collect & Place-Kopfes.
Wenn X- und Y-Achse in Warteposition sind, wird die Sternachse in die Grundstellung gedreht.
6.3.3 LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
Abb. 6.3 - 3 LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
An dieser Sollposition wird eine Passmarke erwartet. Die LP-Kamera bewegt sich aus der Warte-
position zu dieser Passmarken-Position.
– Die LP-Lageerkennung wird durchgeführt, bevor das 1. Bauelement aufgenommen wird.
– Die Portalachsen bewegen die LP-Kamera zu der theoretischen Passmarken-Position. Die
Kamera macht eine Aufnahme der 1. Passmarke. Das Visionsystem errechnet die Mittenposi-
tion.
Sternposition
Digit: 15000
Winkel 15°
1° entspricht 1000 Digits
1
2
1
1
1
0
9
8
7
6
5
1
2
3
4