SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第316页
1 - 4 S tudent Guide SIPLACE HF/HF3 7 T win Head Ausgabe 09/2005 4 7.1.1 T echnische Daten T win Head Abb. 7.1 - 2 T e chnische Daten T win head Bestückgenaui gkeit (X/Y) 35µm bei 4 Sigma mit IC-Kamera Bestückgenauigkeit…
1 - 3
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 7 Twin Head
3
7 Twin Head
7.1 Übersicht
Der Twin head besteht aus zwei gleichen Modulen die nach dem Pick&Place Prinzip arbeiten. Das
zweite P&P-Modul ist gegenüber dem ersten um 180° verdreht.
Für den Twin head wurden neue Pipetten entwickelt (Typ 5xx). Die bisherigen Pipetten des
Pick&Place Kopfes (Typ 4xx) können weiterhin verwendet werden, die Pipetten des Coll-
ect&Place Kopfes (Typ 8xx und 9xx) mit entsprechendem Adapter.
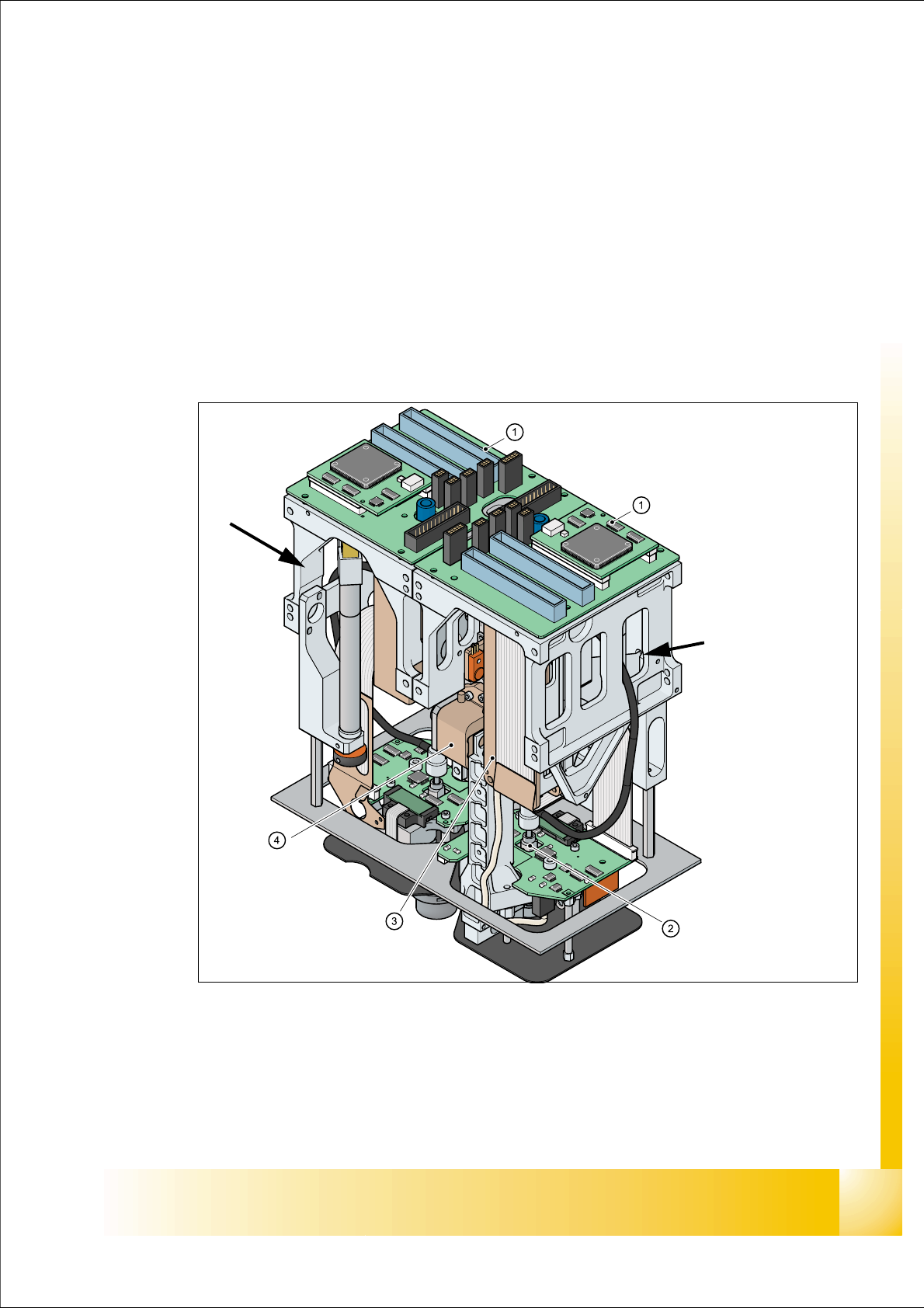
Abb. 7.1 - 1 Twin head
(1) Hauptplatine des jeweiligen Moduls
(2) D-Achse
(3) Linearmotor Z-Achse
(4) Inkrementales Meßsystem Z-Achse
Modul 2, um 180 °
gegenüber Modul 1
gedreht.
Modul 1

1 - 4
Student Guide SIPLACE HF/HF3
7 Twin Head Ausgabe 09/2005
4
7.1.1 Technische Daten Twin Head
Abb. 7.1 - 2 Technische Daten Twin head
Bestückgenauigkeit (X/Y) 35µm bei 4 Sigma mit IC-Kamera
Bestückgenauigkeit (X/Y) 30µm bei 4 Sigma mit FC-Kamera
Bestückgenauigkeit (Winkel) 0,07° bei 4 Sigma
Bestückgeschwindigkeit 3500 BE/h
Maximale BE-Grösse: 50 bis 40 mm (Einfachmessung an beiden Segmenten)
69 up to 10 mm (Mehrfachmessung an beiden Segmenten)
125 up to 10mm (Mehrfachmessung an einem Segment)
200 up to 125mm (Mehrfachmessung mit Einschränkungen an
einem Segment)
Maximale BE-Höhe 25 mm
Bestückkraft 1-15 N (mit Spezialpipette 0,5 N)
D-Achse / Winkelauflösung Direktantrieb / 0,001 Grad
Z-Achse / Auflösung Linearmotor / 0,5 µm
Verfahrbereich Z-Achse ca. 60 mm
Pipettentypen 5xx, (4xx, 8xx, 9xx mit Adapter)
Abstand zwischen den Modulen ca. 71,00 mm
Maximales BE-Gewicht 100g
1 - 5
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 7 Twin Head
5
7.1.2 Baugruppen am Twin Head
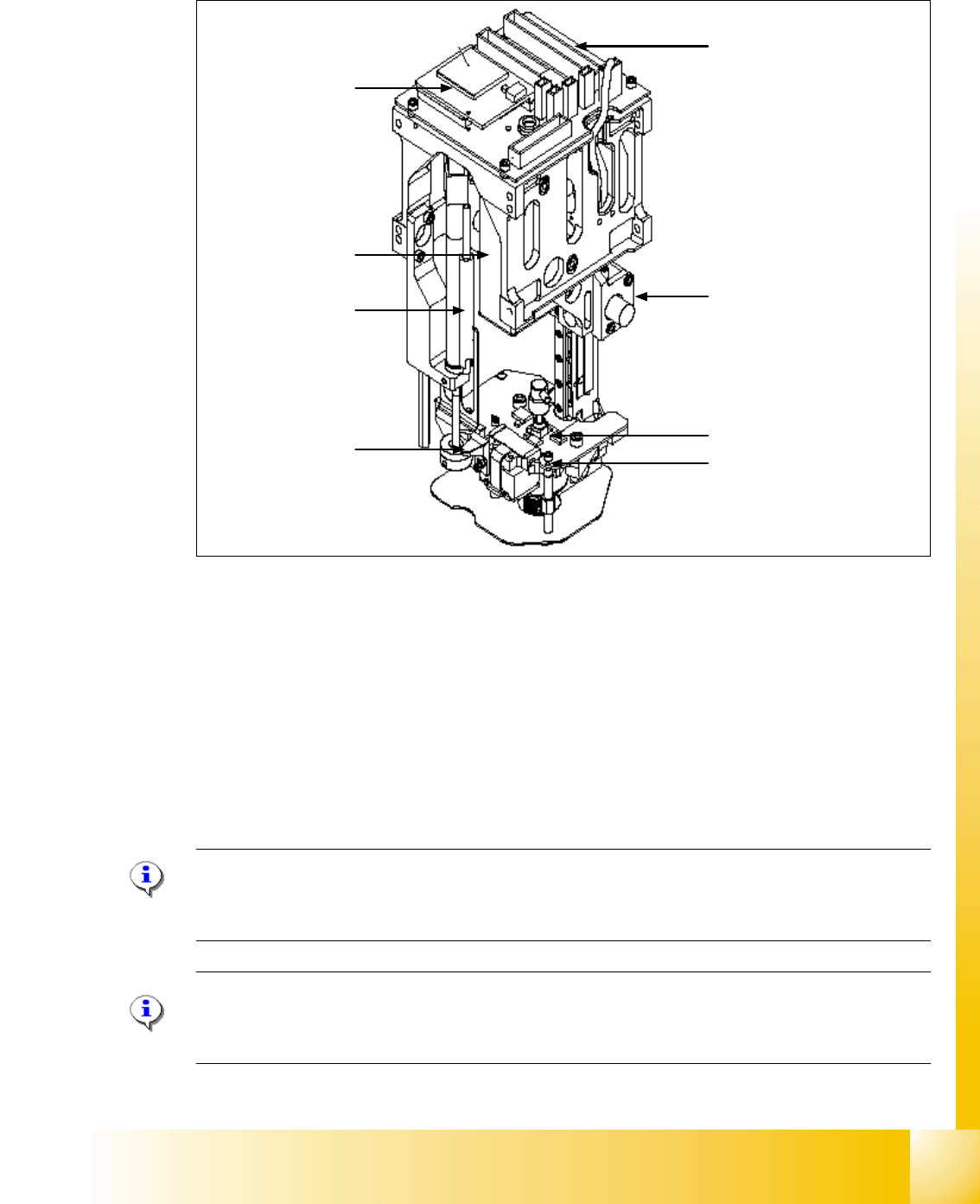
Abb. 7.1 - 3 Baugruppen am Twin head
(1) CAN Bus Processor board
(2) Twin head Kopfplatine
(3) D-Achse komplett mit Lesekopf und Kraftsensor
(4) Lesekopf Z-Achse
(5) Rückholeinheit - fährt Pinole zurück im Falle eines Stromausfalls.
(6) Vakuumerzeuger
(7) Betätigung der Rückholeinheit (rechts) / Schraube an D-Axis board (links)
Hinweis:
Benutzen Sie diese beiden Positionen (7) um die Z-Achse nach unten zu fahren, nachdem die
Servokarte ausgeschaltet wurde (Achskarten ausschalten)!
Hinweis:
Als Ersatzteile wurden die Positionen (1),(2), (4), (5) und (6) definiert, bzw . das komplette
Modul (s. Serviceanleitung).
4
3
2
5
1
6
7
7