SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第453页
1 - 25 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 10 SITES T 25 ➠ Der Mappingvorgang startet. ➠ Nun wird die Kamera zur S tar tposition verfah ren (das nächstliegende Kreuz zur fe sten LP- Ecke). Diese he lle Kreuzmar…
1 - 24
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
24
10.2.5 LP-Mapping
Beim LP-Mapping wird die Linearität der X- und Y-Führung der LP-Kamera im Bearbeitungsbe-
reich gemessen.
Die LP-Kamera vermisst Passmarken-Kreuze einer hochpräzisen Glasplatte.
Diese Mappingplatte wurde in einer Messmaschine vermessen, das Vermessungsprotokoll wird
während des Mappingvorganges berücksichtigt.
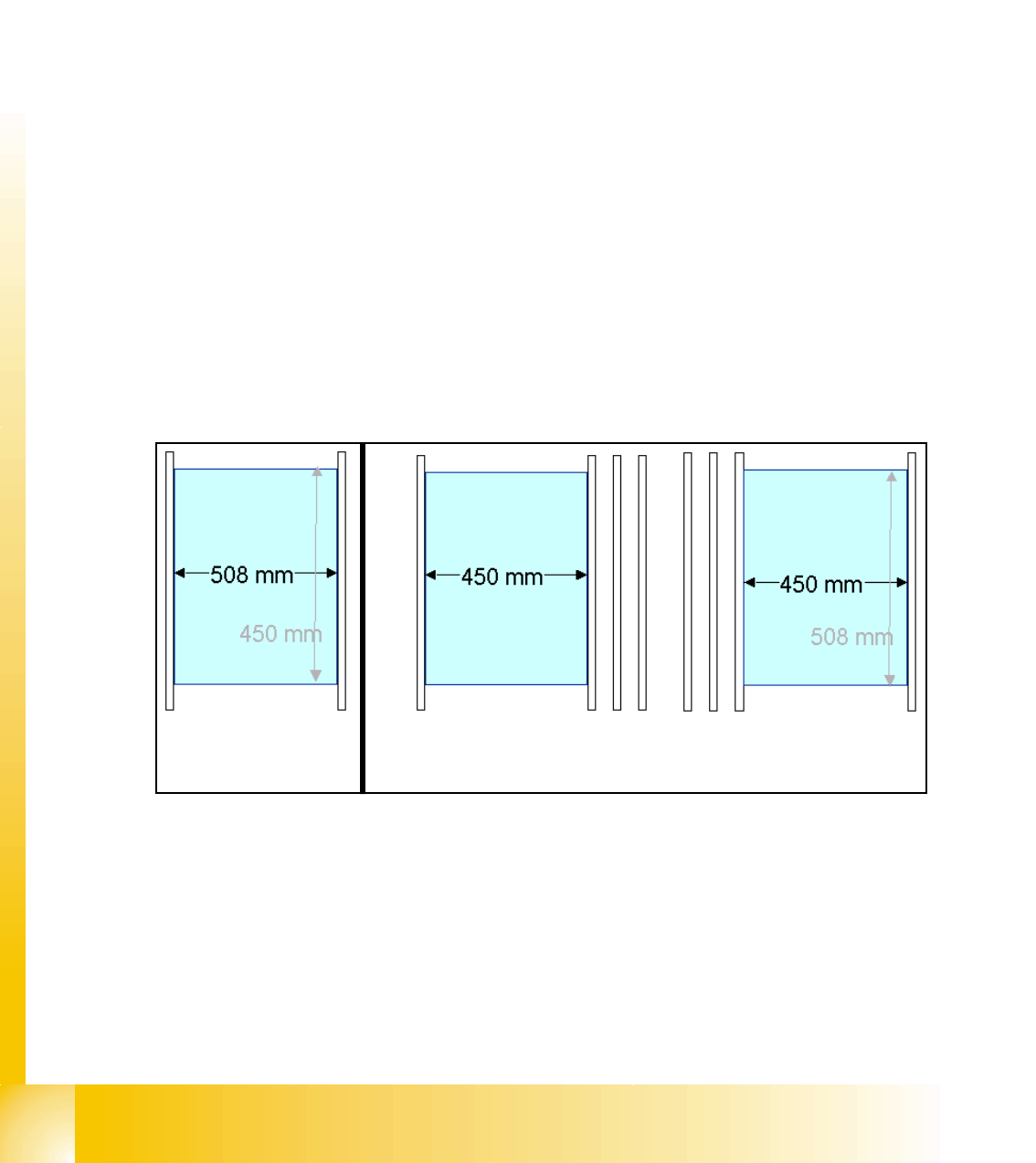
Vorbereitung Mapping: 10
➠ Beim Einzeltransport wird die Transportbreite auf 508 mm eingestellt, die Mappingplatte liegt
90 Grad gedreht im Bearbeitungsbereich.
➠ Beim Doppeltransport bewegt die SITEST SW die Transportwangen der für Mapping benötig-
ten Spur auf 450 mm und die nicht benutzte Spur auf 0mm. Damit läßt sich die Doppeltrans-
portspur als Einzeltransportspur nutzen. Das Mapping muss deshalb für diese maximale
Transportbreite durchgeführt werden.
➠ Zum Vorbereiten des LP- und RV-Mappings stellt die SITEST SW automatisch die Transport-
wangen so, dass die Mappingplatte in ihrer jeweiligen Breite in die jeweiligee Transportspur
passt.
➠ Die C&P Köpfe müssen auf 956er und die Segmente des Twin Heads auf 517 vorbereitet sein.
➠ Das (die) Kalibrierteil(e) sind in die Kalibrierteiltaschen eingelegt.
Fig. 10.2 - 10 Position mapping plate and conveyor rail position for single and dual conveyor
Ablauf: 10
➠ Legen Sie die Mappingdiskette in den Stationsrechner ein und kopieren Sie die spezifischen
Vermessungsdaten dieser Mappingplatte.
➠ Legen Sie die Mappingplatte in den Eingabetransport des BB1 oder den Zwischentransport
des BB2 ein.
➠ Es erscheint das Teach-Menü zum Teachen der LP-Referenz-Ecke der Mappingplatte.
Single conveyor
Dual conveyor
Track 2 Track 1
1 - 25
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
25
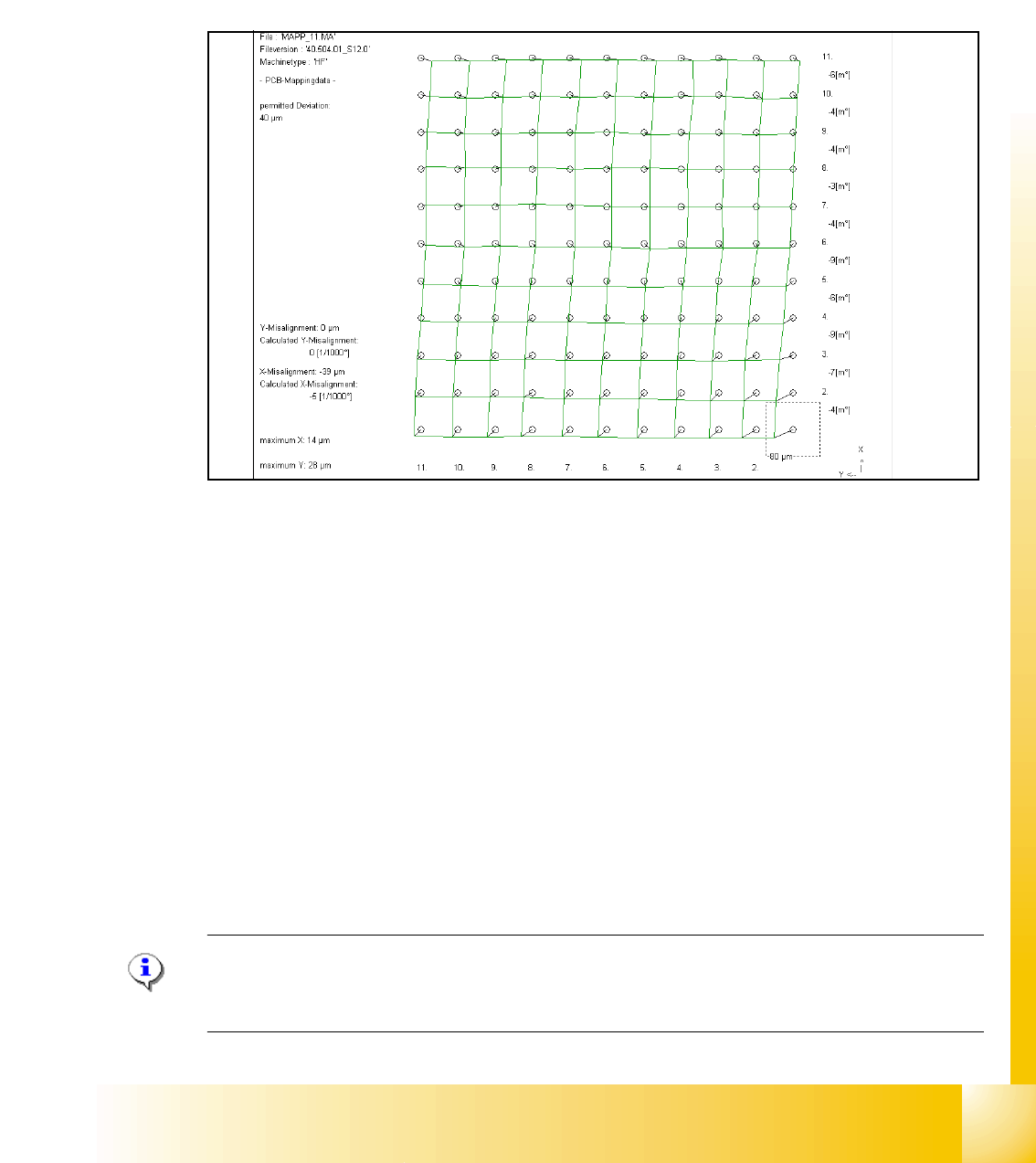
➠ Der Mappingvorgang startet.
➠ Nun wird die Kamera zur Startposition verfahren (das nächstliegende Kreuz zur festen LP-
Ecke). Diese helle Kreuzmarke wird nun nun anhand eines synthetischen Abbildes zentriert.
➠ Diese Koordinaten werden als Sollkoordinaten für die gesamte Glasplatte gesetzt. Für die
nächste Marke werden jeweils 40.000µm in X-, und /oder Y-Richtung aufaddiert.
➠ Die Abweichung dieser Struktur zur Sollposition wird gemessen.
Abb. 10.2 - 11 Ergebnisse des Mappingvorgangs
Die Ergebnisse werden in der Datei MAPP _xy.MA ( x= number of the gantry , y= transport track)
gespeichert.
10.2.6 Kopf Mapping ( C&P, Twin Head)
Mit dem Kopfmapping wird die Linearität der X-, Y-Führung des C&P und Twin Heads gemessen.
Der C&P Kopf bestückt das Kalibrierteil auf die präzisen Standardpositionen der Mappingplatte.
Die LP-Kamera misst die Bestückgenauigkeit dieser Bestückungen für den gesamten Bearbei-
tungsbereich.
➠ Nach Fertigstellen des LP-Mappings zentriert das Visionsystem des Bestückkopfes das Kali-
brierteil und es wird auf die Sollkoordinaten der jeweiligen Position auf der Glasplatte bestückt.
➠ Die LP-Kamera mißt die Bestückgenauigkeit anhand der 4 Kalibrierteilmarken an der Kalibrier-
teiloberseite.
Hinweis:
Alle zuvor beschriebenen automatisch ablaufenden Kalibrierschritte können manuell in den Un-
termenüs ausgeführt werden.
1 - 26
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
26
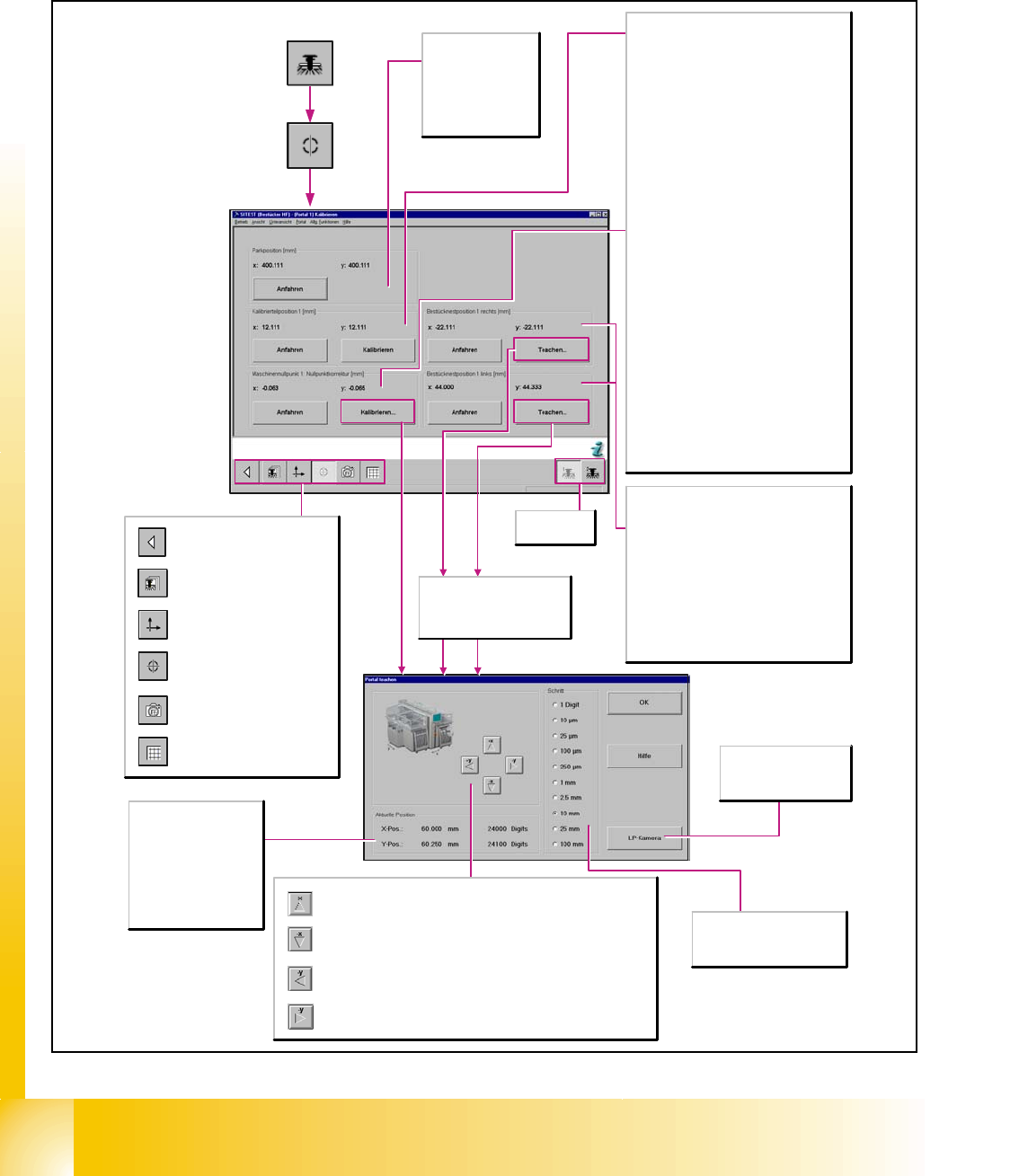
10.2.7 Einzelschritte der Kalibrierung (Ablaufdiagramme am Bsp. SW 504)
10.2.7.1 Kalibrierfuntionen der Portale
Wählt das
Portal 1-2 aus.
Parkposition [mm]
x/y
Zeigt die x/y-Position
der Parkposition an.
Anfahren
Fährt das Portal in die
Parkposition.
Das Teachen der
Bestücknester kann nur
durchgeführt werden, wenn
der Transportmodus normale
Leiterplatte aktiviert ist.
Aktuelle Position
X-Pos.
Zeigt die beim Teachen
angefahrene x-Position
des jeweiligen Portals an.
Y-Pos.
Zeigt die beim Teachen
angefahrene y-Position
des jeweiligen Portals an.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die negative y-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die positive y-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die negative x-Richtung verfahren.
Mit jedem Anklicken der Schaltfläche wird das aktive Portal um einen
Schritt der ausgewählten Schrittweite in die positive x-Richtung verfahren.
Schritt
Auswahl der gewünschten
Schrittweite für das Verfahren
des Portals.
LP-Kamera
Schaltet die
Bildschirmanzeige auf die
Leiterplatten-Kamera um.
Kalibrierteilposition 1 (2) [mm]
x/y
Zeigt den bei der Kalibrierung ermittelten Wert
für die Position des Kalibrierteils in x-/y-Richtung
an. Der vorherige Wert wird in Klammern
angezeigt.
Anfahren
Fährt das aktive Portal mit der LP-Kamera über
die Kalibrierteilposition und schaltet zur
Überprüfung die Bildschirmanzeige auf die LP-
Kamera um. Das Kalibrierteil muss im Suchfeld
der Kamera zu sehen sein.
Kalibrieren
Ermittelt die Position des
Kalibrierteilmittelpunktes.
Maschinennullpunkt: Nullpunktkorrektur
[mm]
x/y
Zeigt den bei der Kalibrierung ermittelten Wert
für die Nullpunktkorrektur in x-/y-Richtung an.
Der vorherige Wert wird in Klammern angezeigt.
Anfahren
Fährt das Portal mit der LP-Kamera über die
Messbohrung für den Maschinennullpunkt und
schaltet zur Überprüfung die Bildschirmanzeige
auf die LP-Kamera um. Der Maschinennullpunkt
muss im Suchfeld der Kamera zu sehen sein.
Kalibrieren...
Öffnet das Dialogfenster Teachen, um die
Position des Maschinennullpunktes anzufahren.
Danach wird beim Kalibriervorgang der Wert für
die Nullpunktkorrektur der X- und Y-Achse
ermittelt.
Bestücknestposition 1 (2) rechts [mm]
Bestücknestposition 1 (2) links [mm]
(Doppeltransport)
x/y
Zeigt die beim Teachen ermittelte Position des
Bestücknestes in x-/y-Richtung an. Die
vorherige Position wird in Klammern angezeigt.
Anfahren
Fährt das aktive Portal mit der LP-Kamera über
die Bestücknestposition und schaltet zur
Überprüfung die Bildschirmanzeige auf die LP-
Kamera um. Die Bestücknestposition muss im
Suchfeld der Kamera zu sehen sein.
Aufruf der Ansicht für die
Leiterplatten-Mappingfunktionen
des Portals.
Aufruf der Ansicht für die
Leiterplatten-Kamerafunktionen
des Portals
Aufruf der Ansicht für die
Kalibrierfunktionen des Portals.
Aufruf der Ansicht für die
Achsfunktionen des Portals.
Aufruf der Ansicht für die
Funktionen des Portals.
Schaltet zur Grundansicht
zurück.