SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第108页
1 - 40 S tudent Guide SIPLACE HF/HF3 3 Kommunikation und S teuerung Ausgabe 09/2005 40 Die Positionierung in Fig. 3.4 - 7 weißt eine große Überschwingung auf. Es passiert aber (b ei die- sem Positionie rvorgang) kein e w…
1 - 39
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
39
Hinweis:
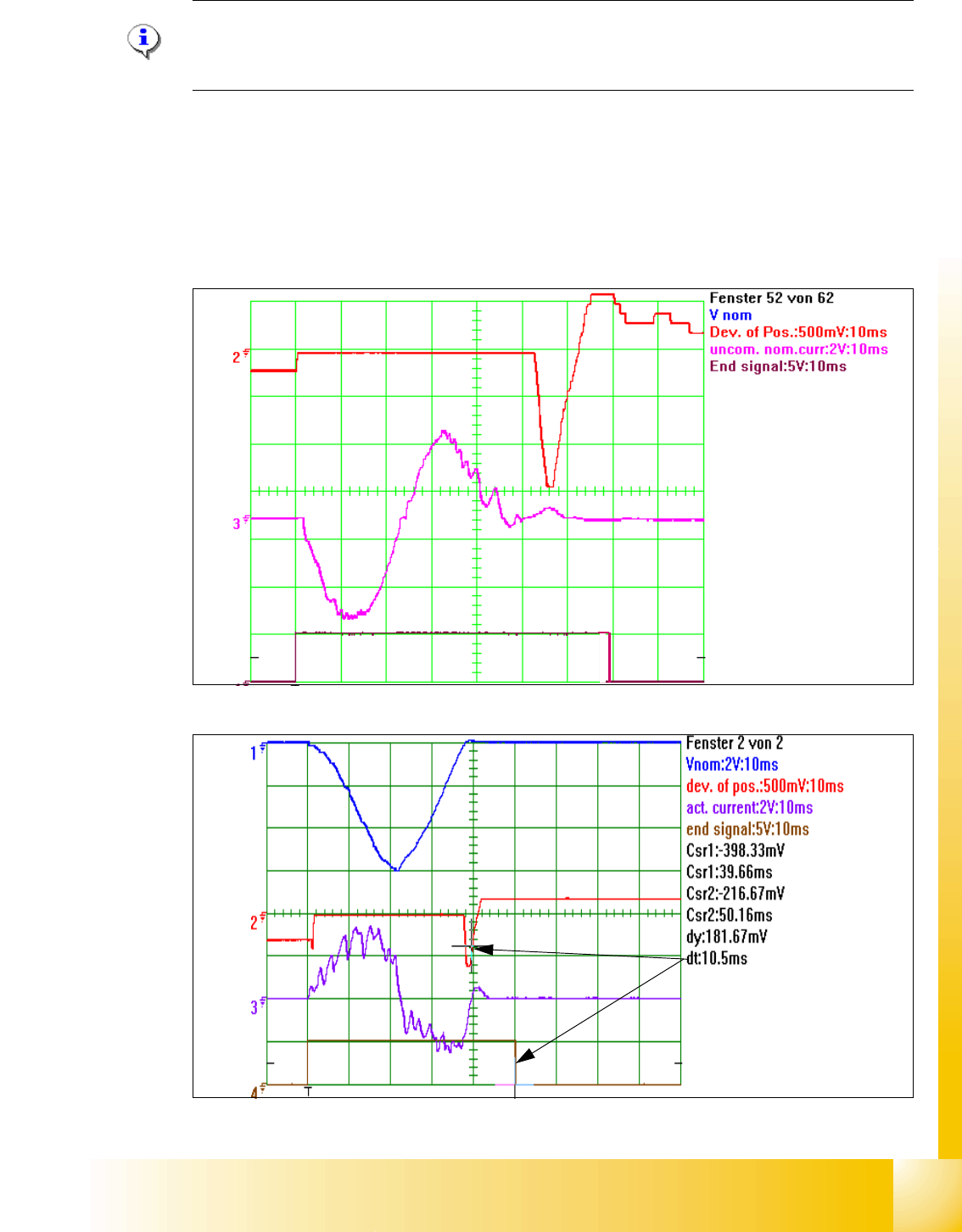
Das Positionsabweichungssignal zeigt die Positionierqualität jeder Achsbewegung in die Zielpo-
sition. 3
Bei der 1. Positionierung in die Zielposition triggert das ’Istposition gleich Sollpositionssignal’ die
Überschwingzählung der Achstestbox (SAT) für das Positionsabweichungssignal.
Ist die Überschwingung größer als die erlaubte Positionsabweichung dieser Achse wird die Ende-
meldung verzögert bis die Abweichung durch einen Regelvorgang innerhalb des erlaubten Berei-
ches bleibt.
Fig. 3.4 - 6 Die 2te Überschwingung setzt die Endemeldung
Fig. 3.4 - 7 Positionierung mit asymtotischer Annäherung nach einer 1. zu großen Überschwingung
1
2
1 - 40
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
40
Die Positionierung in Fig. 3.4 - 7 weißt eine große Überschwingung auf. Es passiert aber (bei die-
sem Positioniervorgang) keine weitere Überschwingung aufgrund der eine Endemeldung erzeugt
werden könnte. Die Achscontroller haben eine ’Rückfallstrategie’ - wenn der ’Bereich der erlaub-
ten Positionsabweichung’ erreicht wird - wird ein 10ms Timer gestartet. 10 ms nach erreichen des
erlaubten Bereiches (hier 5 Digit (1)) triggert diese Timerfunktion die Endemeldung(2). (Der er-
laubte Bereich darf innerhalb dieser Zeit nicht verlassen werden.)
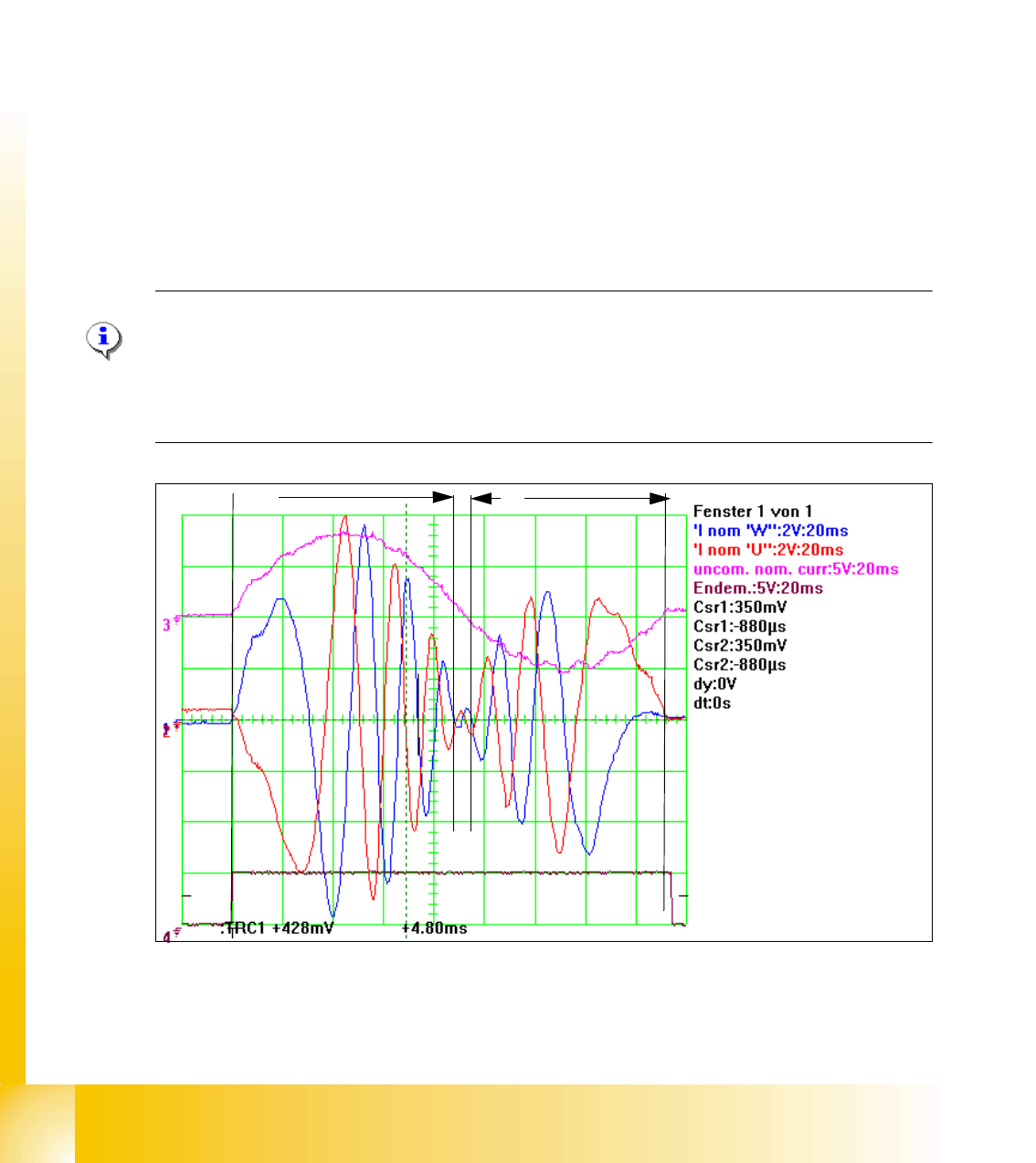
Für die Achsdynamik-Beurteilung durch einen Servicetechniker wurde ein ’unkommutiertes
Stromsollsignal’ aller Motorstrom-Sollsignale geschaffen. Dieses Signal gibt Auskunft über die
mechanische Reibung im Achssystem. Es kann gemessen werden auf der Adapterkarte der Ach-
stestbox oder als Vreg-Ausgang des Siplace AxisTester (SAT).
Das unkommutierte Stromsollsignal ist ein ’Hüllkurvensignal’ der 2 sichtbaren Motorstrom-Soll-
signale des Achscontrollers. Das 3. nicht sichtbare Motorstrom-Sollsignal wird auf dem Servover-
stärkerboard berechnet.
Das bekannte ’V nominal ’ (Vsoll) Geschwindigkeitssignal und das ’force’ Kraftsignal wurden er-
setzt durch Motorstrom-Sollsignale für DC bzw. AC-Antriebe.
Hinweis:
Diese Motorstromsignale können an dem ’V nominal’- und dem ’Force’ Ausgang des AchsTester
gemessen werden.
Die gleichen Signals werden an den 2 obersten Testpunkten an der Servoverstärkerplatine als
’Inom. U’ ’Inom. W’ gemessen.
Fig. 3.4 - 8 Das unkommutierte Motorstromsollsignal (3) und die Motorstromsignale (1) (2) eines AC Motor
Den Abschnitt ’Beschleunigung erkennt man am Motorstrom-Sollsignal des AC Motors (4) auf-
grund der hohen Amplituden um die Achsmechanik mit genügend Kraft zu versorgen. Die Fre-
4
5
6
1 - 41
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
41
quenz dieses Signalabschitts ist wegen der geringen Geschwindigkeit niedrig. Die Amplitude wird
kleiner weil mit steigender Geschwindigkeit die Beschleunigung und damit die Motorkraft sinkt.
Die Frequenz wird mit steigender Geschwindigkeit höher bis zur maximal Frequenz für maximal
Geschwindigkeit der Achse (5).
Im Verzögerungabschnitt steigt die Amplitude wieder um die Geschwindigkeit der Achsmechanik
zu reduzieren. Die Frequenz wird niedriger damit sinkt auch die Geschwindigkeit der Achse (6)
ab. Als abschliessender Vorgang wird mit Überschwingkontrolle die Achse in die korrekte Zielpo-
sition bewegt.
Obwohl es keine Einstellmöglichkeiten am Servo gibt soll die Achsdynamik überprüft werden.
Jede Achse hat eine Reibung zu überwinden, je höher diese Reibung desto höher die Amplituden
bei Beschl. und konstant Geschw. Die höhere Motorkraft bei Beschl. und konst. Geschw. kann am
’unkommutierten Motorstrom-Sollsignal’ erkannt werden. Eine höhere Reibung reduziert die nö-
tige Motorkraft während des Verzögerungsabschnitts so ist die Amplitude des ’unkommutierten
Motorstrom-Sollsignal’, kleiner.
Hinweis:
Mechanische oder elektrische Fehler können durch die Signalverläufe der Achssteuerung erkannt
werden.
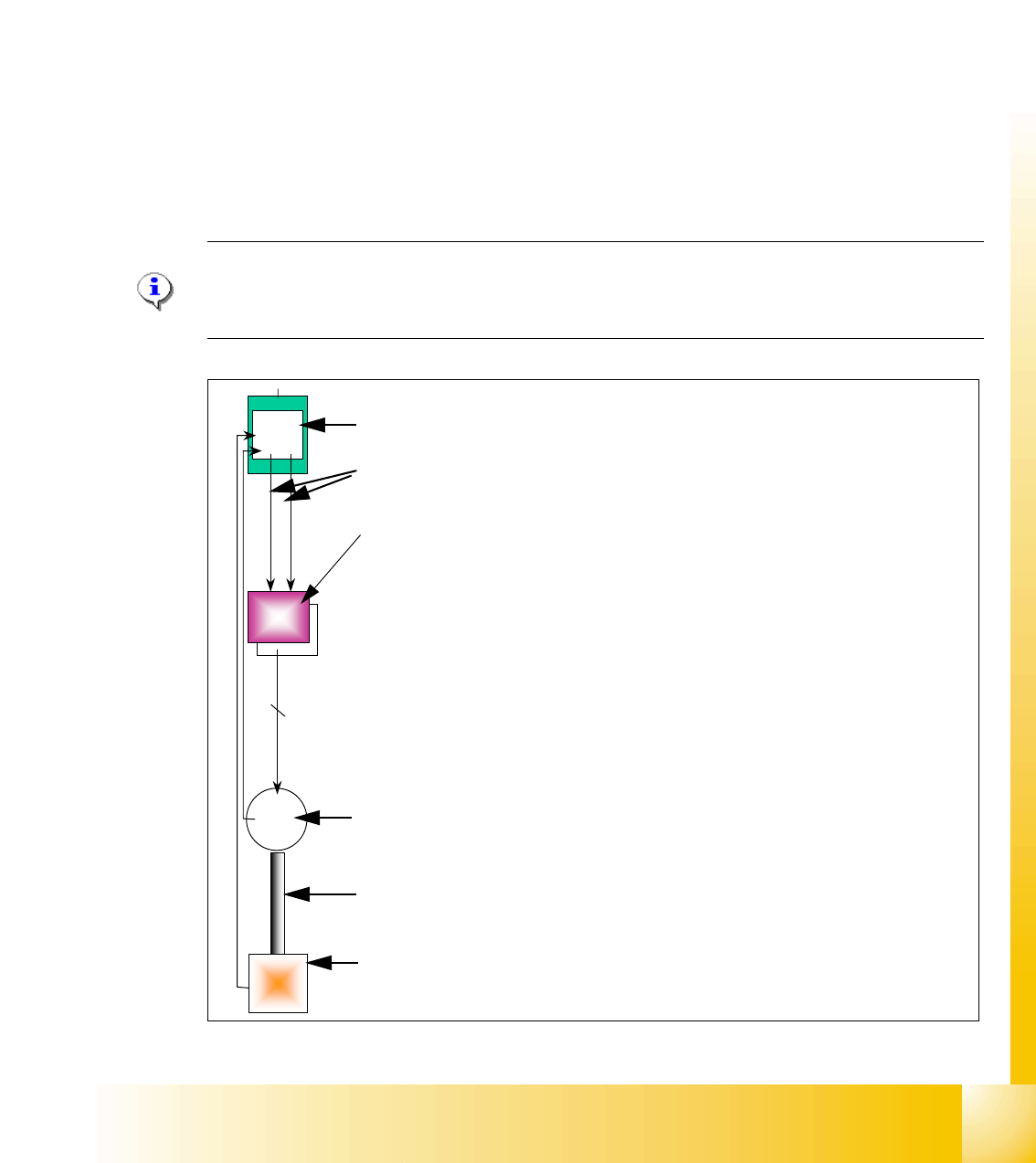
Fig. 3.4 - 9 Achsblockdiagramm am Beispiel X oder Y-Achse der HF Maschine
Brake
board
VC 3
cont
Servo
ampl.
M
3 ~
Enco-
der
3
Achscontroller-platine A363 mit VC 3 Controller
(VC = Velocity Commutation / Geschw. Kommutierungs-Controller)
Steuerungssignale I
nom "W" und I nom "U"
Funktion Servoverstärker:
Motorstrombegrenzer dimensioniert nach Halbleiter oder Motorlast
Verstärken der Achscontrollersignale.
ermitteln des 3. Motorstromsignal.
erzeugen der 3 (2) AC-Motorsignale aus der DC-Versorgung.
Die X/Y Servoausgangssignale sind über die ’Bremsplatine’ angeschlossen.
Das garantiert die Bedienersicherheit bei geöffneten Schutzhauben.
hier ist ein 3 Phasen-AC-Motor mit eingebautem Temperatursensor.
Der Motor und der Inkrementalgeber ist auf eine gemeinsame Grundplatte
montiert.
Inkrementalgeber: ermittelt die exakte Position der Achse aufgrund der
Spursignale.