SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第452页
1 - 24 S tudent Guide SIPLACE HF/HF3 10 SITEST Ausgabe 09/2005 24 10.2.5 LP-Mapping Beim LP-Mapping wird die Linea rität der X- und Y -Führung der LP-Kamera im Bearbeitung sbe- reich gemes sen. Die LP-Kamera vermisst Pas…
1 - 24
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
24
10.2.5 LP-Mapping
Beim LP-Mapping wird die Linearität der X- und Y-Führung der LP-Kamera im Bearbeitungsbe-
reich gemessen.
Die LP-Kamera vermisst Passmarken-Kreuze einer hochpräzisen Glasplatte.
Diese Mappingplatte wurde in einer Messmaschine vermessen, das Vermessungsprotokoll wird
während des Mappingvorganges berücksichtigt.
Vorbereitung Mapping: 10
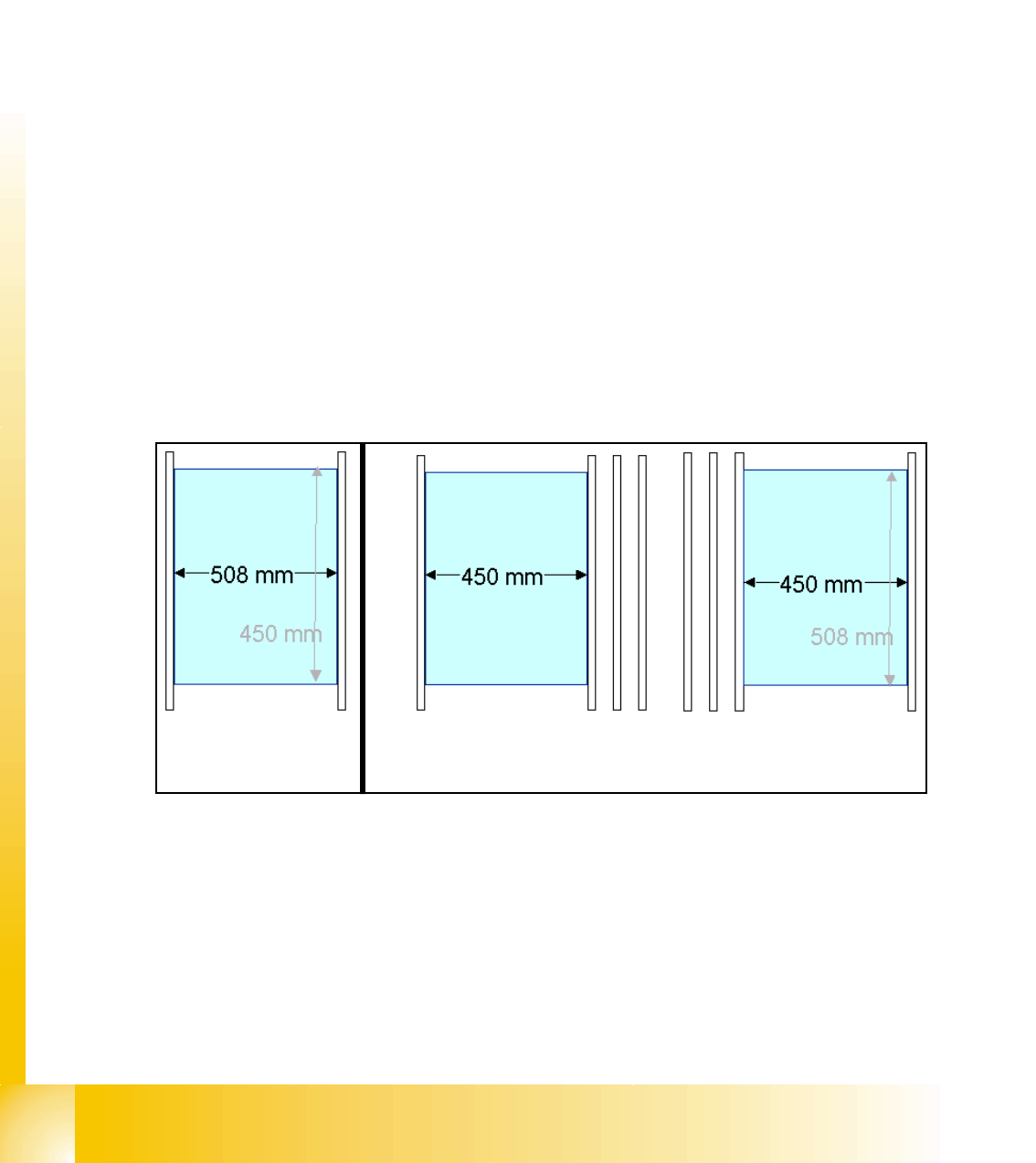
➠ Beim Einzeltransport wird die Transportbreite auf 508 mm eingestellt, die Mappingplatte liegt
90 Grad gedreht im Bearbeitungsbereich.
➠ Beim Doppeltransport bewegt die SITEST SW die Transportwangen der für Mapping benötig-
ten Spur auf 450 mm und die nicht benutzte Spur auf 0mm. Damit läßt sich die Doppeltrans-
portspur als Einzeltransportspur nutzen. Das Mapping muss deshalb für diese maximale
Transportbreite durchgeführt werden.
➠ Zum Vorbereiten des LP- und RV-Mappings stellt die SITEST SW automatisch die Transport-
wangen so, dass die Mappingplatte in ihrer jeweiligen Breite in die jeweiligee Transportspur
passt.
➠ Die C&P Köpfe müssen auf 956er und die Segmente des Twin Heads auf 517 vorbereitet sein.
➠ Das (die) Kalibrierteil(e) sind in die Kalibrierteiltaschen eingelegt.
Fig. 10.2 - 10 Position mapping plate and conveyor rail position for single and dual conveyor
Ablauf: 10
➠ Legen Sie die Mappingdiskette in den Stationsrechner ein und kopieren Sie die spezifischen
Vermessungsdaten dieser Mappingplatte.
➠ Legen Sie die Mappingplatte in den Eingabetransport des BB1 oder den Zwischentransport
des BB2 ein.
➠ Es erscheint das Teach-Menü zum Teachen der LP-Referenz-Ecke der Mappingplatte.
Single conveyor
Dual conveyor
Track 2 Track 1
1 - 25
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
25
➠ Der Mappingvorgang startet.
➠ Nun wird die Kamera zur Startposition verfahren (das nächstliegende Kreuz zur festen LP-
Ecke). Diese helle Kreuzmarke wird nun nun anhand eines synthetischen Abbildes zentriert.
➠ Diese Koordinaten werden als Sollkoordinaten für die gesamte Glasplatte gesetzt. Für die
nächste Marke werden jeweils 40.000µm in X-, und /oder Y-Richtung aufaddiert.
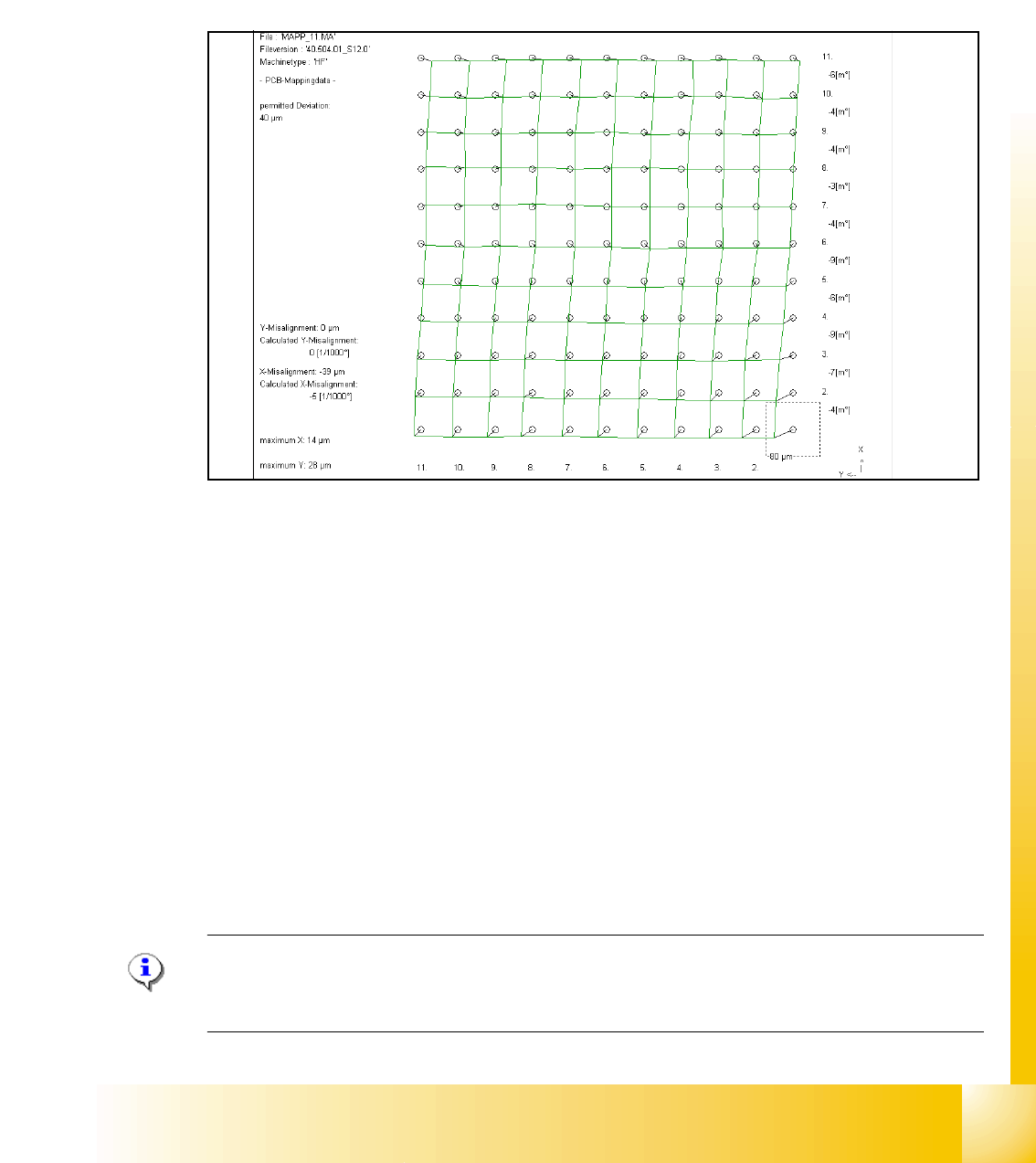
➠ Die Abweichung dieser Struktur zur Sollposition wird gemessen.
Abb. 10.2 - 11 Ergebnisse des Mappingvorgangs
Die Ergebnisse werden in der Datei MAPP _xy.MA ( x= number of the gantry , y= transport track)
gespeichert.
10.2.6 Kopf Mapping ( C&P, Twin Head)
Mit dem Kopfmapping wird die Linearität der X-, Y-Führung des C&P und Twin Heads gemessen.
Der C&P Kopf bestückt das Kalibrierteil auf die präzisen Standardpositionen der Mappingplatte.
Die LP-Kamera misst die Bestückgenauigkeit dieser Bestückungen für den gesamten Bearbei-
tungsbereich.
➠ Nach Fertigstellen des LP-Mappings zentriert das Visionsystem des Bestückkopfes das Kali-
brierteil und es wird auf die Sollkoordinaten der jeweiligen Position auf der Glasplatte bestückt.
➠ Die LP-Kamera mißt die Bestückgenauigkeit anhand der 4 Kalibrierteilmarken an der Kalibrier-
teiloberseite.
Hinweis:
Alle zuvor beschriebenen automatisch ablaufenden Kalibrierschritte können manuell in den Un-
termenüs ausgeführt werden.