JUKI_KE-2050-2060_MAINTE_CH维修要领.pdf - 第23页
Rev2.00 维修调整要领书 1-4-3. 传感器头和后通路的间隙 (Y 轴 ) ① 在 Y 轴的全行程,请确认 Y 轴后通路和传感器头的间隙, 0.5mm 的间隙标尺应该正好插入。 ②① 的确认,如果间隙不是 0.5mm 时,请拧松固定处啊杆器托架的螺丝 ( 下图的螺丝 ②)。 ③ 在 Y 轴直线导轨与传感头的间隙内,插入 0.5 m m 的间隙规,重新旋紧螺丝。 ④ 实施 ① 的确认方法 。 传感器头 磁标尺 螺丝① 螺丝② ・ …
Rev2.00
维修调整要领书
1-4-2.电磁标尺的盖子
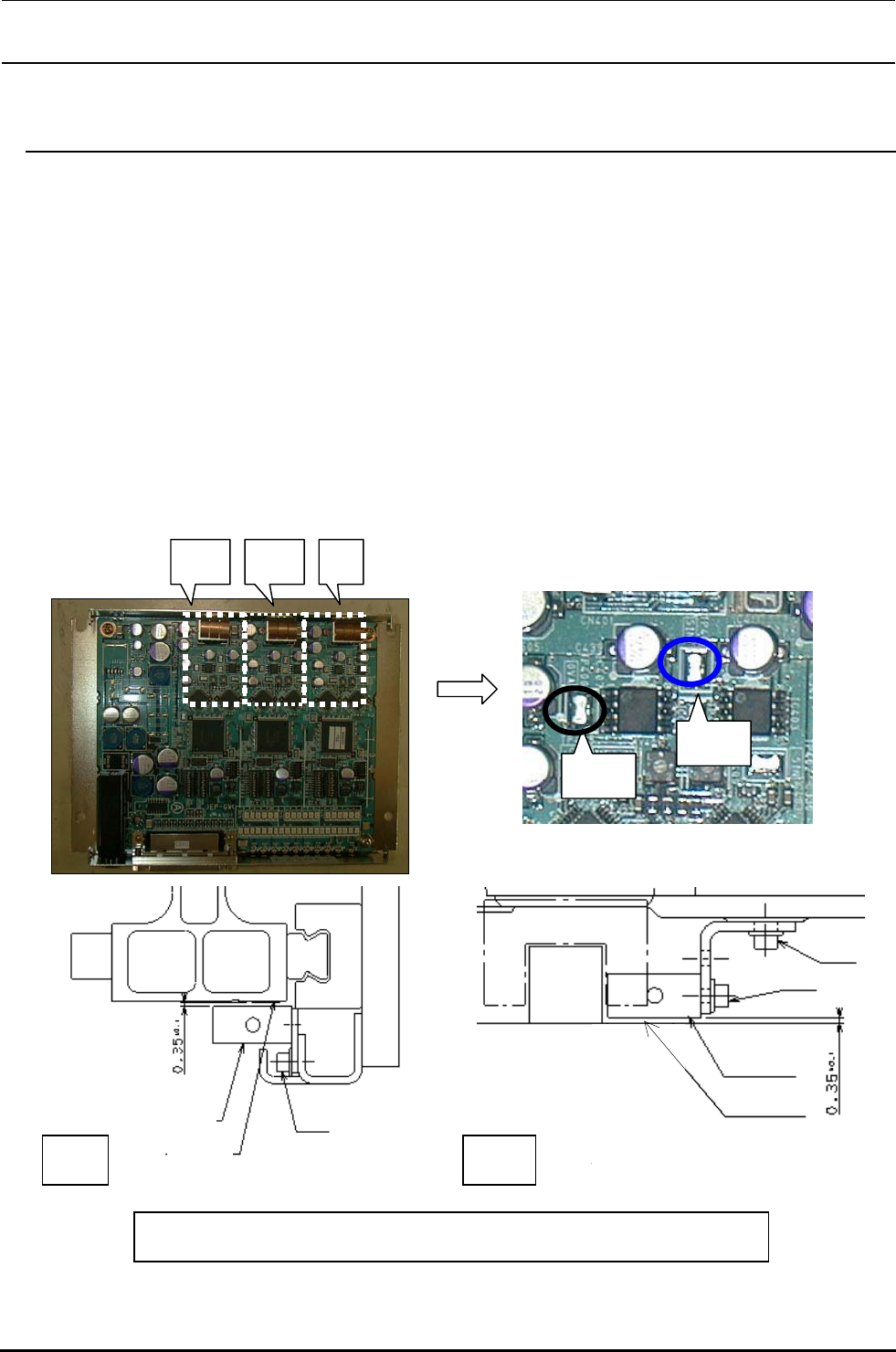
①打开电磁标尺的盒(40003268)罩。
②在各轴,把示波器的 GND 端子连接到「0 VA」,测定「SIN」端子的电压波形。X时,移动贴装头,、YL
或 YR 时,移动 X 轴,从负限制传感器到正限制传感器的位置。此时,观测示波器出现的正弦波,确
认在全领域 P-P 值应在1.5 V 以上。
③P-P值不到1.5V时,拧松固定传感器的螺丝(X轴为下图的螺丝①、Y轴为③)。
④把MSC夹具(货号40008106)中的t0.35mm夹到电磁标尺和传感器头的间隙,然后拧紧螺丝。
⑤在XY轴全行程,确认电磁标尺和传感器头的间隙,MSC夹具(货号40008106)中的t0.25mm可以
插入,t0.45mm不能插入。
⑥实行②的确认方法。
注)卸下护罩、传感头,拆卸时应关掉电源之后再进行。
YR YL X
OVA
SIN
磁标尺
传感器头
SIN
0 VA
Y轴
螺丝②
螺丝③
传感器头
磁标尺
螺丝①
X 轴
电磁标尺和传感器头的间隙 :0.35±0.1mm
1-14
Rev2.00
维修调整要领书
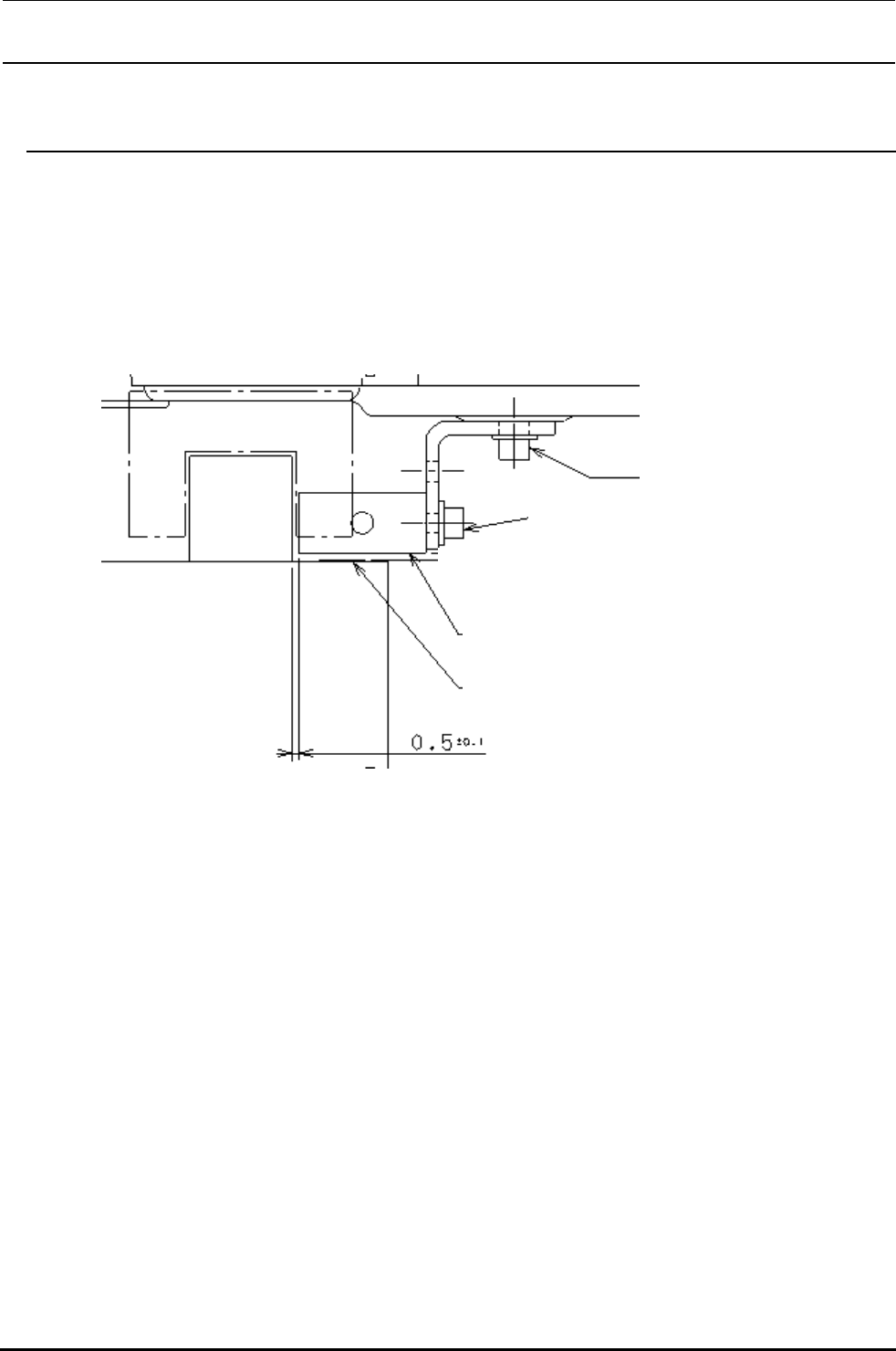
1-4-3.传感器头和后通路的间隙(Y轴)
①在Y轴的全行程,请确认Y轴后通路和传感器头的间隙,0.5mm的间隙标尺应该正好插入。
②①的确认,如果间隙不是0.5mm时,请拧松固定处啊杆器托架的螺丝(下图的螺丝②)。
③在 Y 轴直线导轨与传感头的间隙内,插入0.5 mm 的间隙规,重新旋紧螺丝。
④实施①的确认方法。
传感器头
磁标尺
螺丝①
螺丝②
・传感器头和后通道Y的间隙 :0.5±0.1mm (Y轴)
1-15
Rev2.00
维修调整要领书
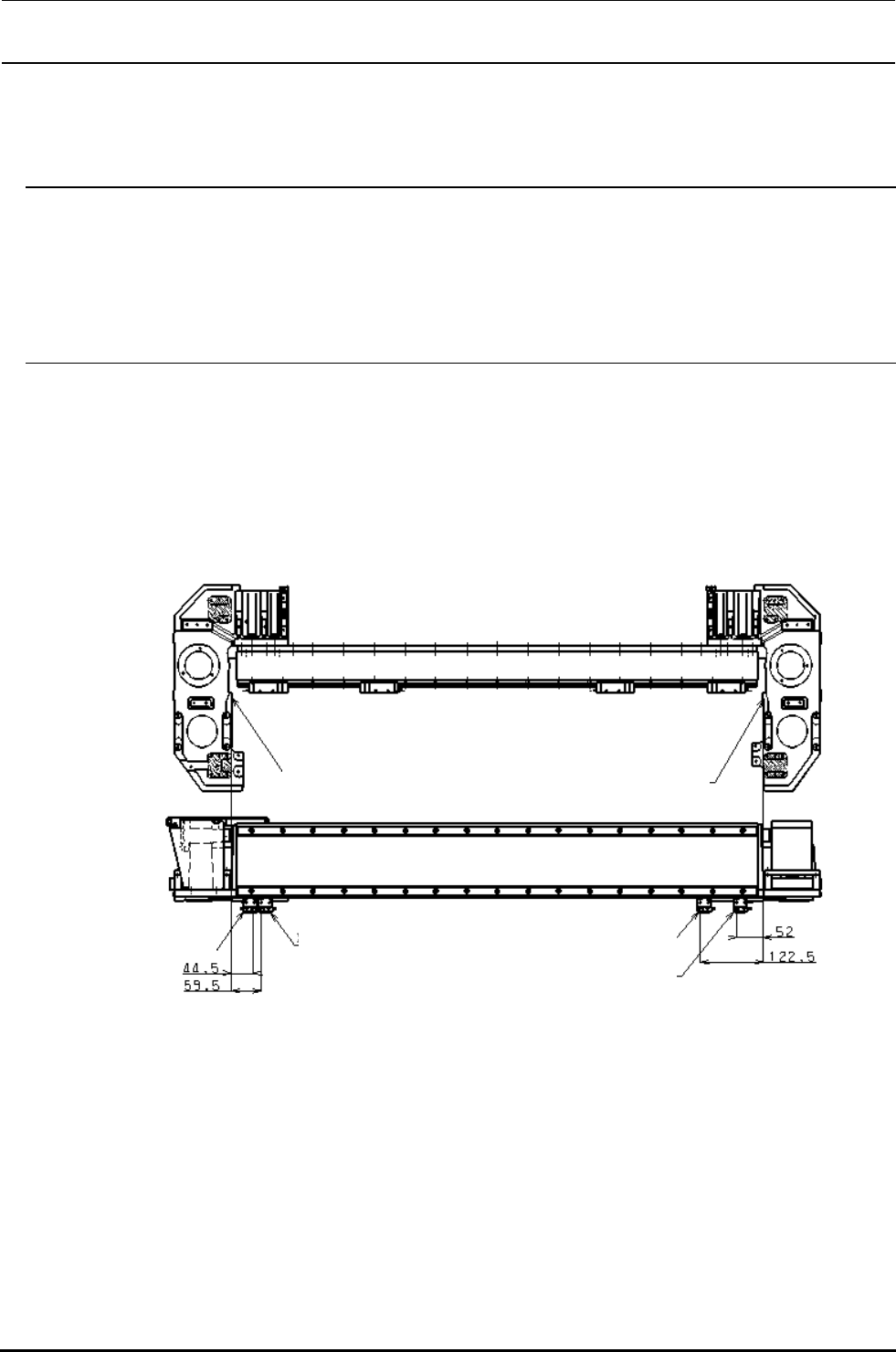
1-5.限制传感器、X轴原点附近传感器的更换
※如果只更换传感器,不须要调整位置。。
※包括托架也更换时,需要调整位置。
1-5-1.X轴限制传感器、X轴原点附近传感器的更换
※如果只更换传感器,不须要调整位置。
※连同托架一起更换时,须要调整位置。
①拧松固定X限制传感器托架的螺丝,按照上图的X架端L、R的距离进行固定。
②前后方向,传感器头板背面安装的X-MSC托架和传感器表面固定时的间隙应为0.8~1.5mm(精
度1.0mm)。
X 负限制传感器 X 原点附近传感器
X 正限制传感器(KE-2050)
X 正限制传感器(KE-2060)
止动橡胶粘贴面 止动橡胶粘贴面
X 轴限制传感器位置
左侧(X负限制传感器)
X架端L的止动橡胶安装面和传感器中心的距离:44.5mm
中央(X原点附近传感器) X架端L的止动橡胶安装面和传感器中心的距离:59.5mm
右侧(X正限制传感器) X架端R的止动橡胶安装面和传感器中心的距离
:52mm(KE-2050/50 R/55 R)、122.5mm(KE-2060/60 R)
限制传感器的间隙
0.8~1.5mm(精度1.0mm)
1-16