JUKI_KE-2050-2060_MAINTE_CH维修要领.pdf - 第249页
R E V 2 . 0 0 维修调整要领书 14-44 14-7-3. 步进驱动器的调整 传送装置的中心马达和支承台马达使用步进马达 。 为了正确地转动步进马达,需要调整 5 相步进驱动器 。 ・ 中心马达 ( 传送步进马达 ) HM001320000 5 相步进驱动器 ・ 支承台马达 ( 非 EN 规格时 ) HX004200000 5 相步进驱动器 ・ 支承台马达 (EN 规格时 ) HX005450000 5 相步进驱动器 14-…

REV2.00
维修调整要领书
14-43
SW 6:STOP(R) 在硬件设定传感器的传送延迟时间的调整开关。
开关设定与 SW1 相同。
W6:STOP(R) 传感器延迟时间硬件控制的 ON/OFF 变换。开放:ON/短接:OFF
SW 7:C.OUT(R)在硬件设定传感器的传送延迟时间的调整开关。
开关设定与 SW1 相同。
W7:C.OUT(R) 传感器延迟时间硬件控制的 ON/OFF 变换。开放:ON/短接:OFF
W8:OUT 马达(传送方向不同使用的插头也变化)用制动时间的设定。
短接越小号的销制动时间就越短,短接越大号的销制动时间就越长。
W9:STOP(L)变换把传感器的电源设定为常时 ON(短接 1、2)或需要时 ON(短接 2、3)。
W10:C.OUT(L)变换把传感器的电源设定为常时 ON(短接 1、2)或需要时 ON(短接 2、3)。
W11:STOP(L)变换把传感器的电源设定为常时 ON(短接 1、2)或需要时 ON(短接 2、3)。
W12:C.OUT(L)变换把传感器的电源设定为常时 ON(短接 1、2)或需要时 ON(短接 2、3)。
W13:1时钟的时间设定。
1-2:10msec、3-4:20msec、5-6:40msec、7-8:80msec、9-10:160msec (晚优先)
W14:IN 马达(传送方向不同使用的插头也变化)用制动时间的设定。
短接越小号的销制动时间就越短,短接越大号的销制动时间就越长。
W15:5V/24V 设定连接(短接)GND 或隔离(开放)。
REV2.00
维修调整要领书
14-44
14-7-3.步进驱动器的调整
传送装置的中心马达和支承台马达使用步进马达。
为了正确地转动步进马达,需要调整5相步进驱动器。
・中心马达(传送步进马达) HM001320000 5相步进驱动器
・支承台马达(非EN规格时) HX004200000 5相步进驱动器
・支承台马达(EN规格时) HX005450000 5相步进驱动器
14-7-3-1.传送步进马达驱动电流的调整
<调整程序>
① 调整前,请确认『DC电源输出电压的调整』。
② 转动传送步进马达,用数字万能表测定5相步进驱动器上的『CP1』,『CP2』端子的电压。
数字万用表的连接,『CP1』为”+”,『CP2』为”-”。
③ 慢慢转动『RUN』旋钮,让『CP1』~『CP2』之间的电压为2.8V±0.01V。。
④ 请把步进驱动器上的步进SW设定如下图所示。
・规格值
驱动电流:1.4A±0.005A/相
( CP1-CP2之间的电压为2.8V±0.01V)
ON
1 2
1.ON
2.OFF
图 14-7-3-1-1 设定开关的设定
REV2.00
维修调整要领书
14-45
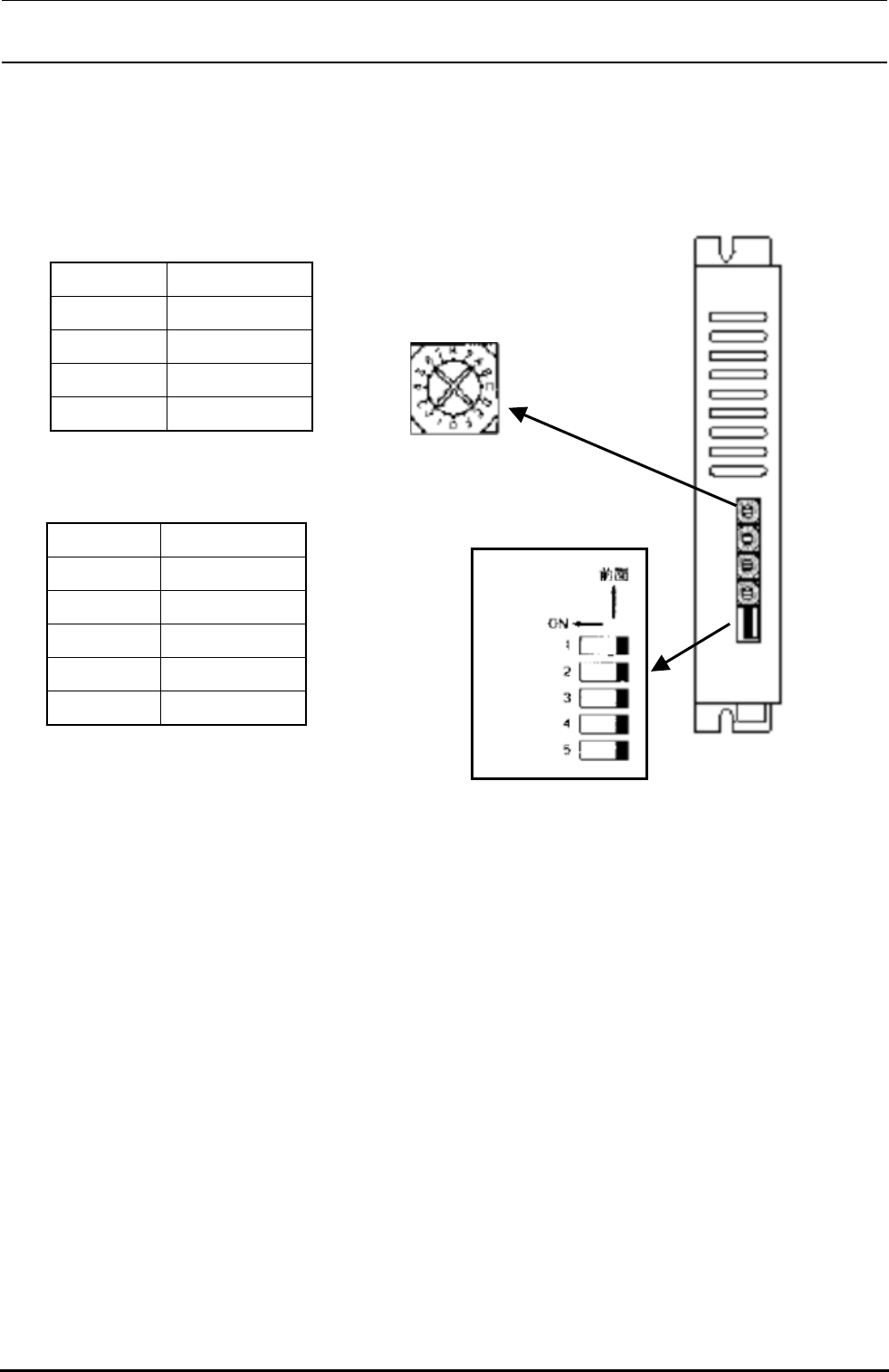
14-7-3-2.支承台/自动宽度调整用步进马达驱动器的设定
<调整程序>
① 把设定用的旋转开关设定如下表所示。
② 设定用的步进SW设定如下表所示。
SW名称 设定值
STOP 5
RUN C
M2 0
M1 0
SW名称 设定值
TEST OFF
2/1CK OFF
C.D OFF
L/HV ON
OP OFF
旋转部箭头指向设定值。
STOP
RUN
OP
L/HV
C.D
2/1CK
TEST
M2
M1