MIL-STD-202H.pdf - 第193页
MI L - S TD - 202 -2 1 3 M E TH O D 21 3 SH O C K (SPEC I F I ED PU L SE) 1. SCOPE 1. 1 P urpose . T his test i s c on duc t ed f or t he pur p os e of d et e r m i ni ng t he s ui t abi l i t y of c o m p onent part s a…
MIL-STD-202-213
CONTENTS
PARAGRAPH PAGE
FOREWORD…………………………………………………………. ii
1. SCOPE 1
1.1 Purpose………………………………………….……..…………. 1
2. APPLICABLE DOCUMENTS 1
2.1 Non-Government publications…………………………………. 1
3. DEFINTIONS 1
4. GENERAL REQUIREMENTS 1
4.1 Apparatus………………………………………….….........……. 1
4.1.1 Shock machine....................................................................... 1
4.1.1.1 Shock machine calibration …….............................................. 1
4.1.2 Instrumentation………….………………….………...…………. 1
4.1.2.1 Frequency response..………………..…….………...…………. 1
4.1.2.1.1 Frequency response measurement of the
complete instrumentation………..…..…….………...…………. 2
4.1.2.1.2 Frequency response measurement of auxiliary equipment.... 2
4.1.2.2 Transducer………..…..…….……….........................…………. 5
4.1.2.3 Transducer calibration………..................................…………. 5
4.1.2.4 Linearity………........................................................…………. 5
4.1.2.5 Transducer mounting……………………………………………. 5
4.1.3 Application of shock measuring instrumentation…………….. 5
4.2. Shock pulses …………………………..….….…………………. 5
4.2.1 Half-sine shock pulse……………..….…………………………. 5
4.2.1.1 The ideal half-sine pulse………..….………………..…………. 5
4.2.2 Sawtooth shock pulse…..….…………….…………..…………. 5
4.2.2.1 The ideal terminal-peak sawtooth…….…………..……………. 5
4.3. Procedure………………………………………..……..…………. 6
4.3.1 Basic design test ….…………….………………………………. 6
5. DETAILED REQUIREMENTS 7
5.1 Measurements …………………………………..………………. 7
5.2. Summary …………………..……………………..…..…………. 7
6. NOTES 7
6.1 Supersession data………………………………………………. 7
6.2 Cancelled Method …………………………………………….…. 7
FIGURES PAGE
1. Tolerances for half sine shock pulse………………………………….….. 2
2. Tolerances for terminal-peak sawtooth shock pulse. ……………….….. 3
3. Tolerance limits for measuring system frequency response…………… 4
TABLES PAGE
1. Test condition values………………………………………………….…… 6
iii
北测(上海)电子科技有限公司
联系方式:xuyj@beice-sh.com 13917165676
MIL-STD-202-213
METHOD 213
SHOCK (SPECIFIED PULSE)
1. SCOPE
1.1 Purpose. This test is conducted for the purpose of determining the suitability of component parts and
subassemblies of electrical and electronic components when subjected to shocks such as those which may be
expected as a result of rough handling, transportation and military operations. This test differs from other shock tests
in this standard in that the design of the shock machine is not specified, but the half-sine and sawtooth shock pulse
waveforms are specified with tolerances. The frequency response of the measuring system is also specified with
tolerances.
2. APPLICABLE DOCUMENTS
2.1 Non-Government publications. The following documents form a part of this document to the extent specified
herein. Unless otherwise specified, the issues of these documents are those cited in the solicitation or contract.
ACOUSTICAL SOCIETY OF AMERICA (ASA)
ASA S2.2 - Methods for the Calibration of Shock and Vibration Pickups
(Copies of this document are available online at http://asa.aip.org)
3. DEFINTIONS
This section not applicable to this standard.
4. GENERAL REQUIREMENTS
4.1. Apparatus.
4.1.1 Shock machine. The shock machine utilized shall be capable of producing the specified input shock pulse as
shown on figures 1 or 2, as applicable. The shock machine may be of the free fall, resilient rebound, nonresilient,
hydraulic, compressed gas, or other activating types.
4.1.1.1 Shock machine calibration. The actual test item, or a dummy load which may be either a rejected item or a
rigid dummy mass, may be used to calibrate the shock machine. (When a rigid dummy mass is used, it shall have
the same center of gravity and the same mass as that of the test item and shall be installed in a manner similar to
that intended for the test item.) The shock machine shall then be calibrated for conformance with the specified
waveform. Two consecutive shock applications to the calibration load shall produce waveforms which fall within the
tolerance envelope given on figures 1 or 2. The calibration load shall then be removed and the shock test performed
on the actual test item. If all conditions remain the same, other than the substitution of the test item for the calibration
load, the calibration shall then be considered to have met the requirements of the waveform.
NOTE: It is not implied that the waveform generated by the shock machine will be the same when the actual test
item is used instead of the calibration load. However, the resulting waveform is considered satisfactory if the
waveform with the calibration load was satisfactory.
4.1.2 Instrumentation. In order to meet the tolerance requirements of the test procedure, the instrumentation used
to measure the input shock shall have the characteristics specified in the following paragraphs.
4.1.2.1 Frequency response. The frequency response of the complete measuring system, including the transducer
through the readout instrument, shall be as specified by figure 3.
1
北测(上海)电子科技有限公司
联系方式:xuyj@beice-sh.com 13917165676
MIL-STD-202-213
4.1.2.1.1 Frequency response measurement of the complete instrumentation. The transducer-amplifier-recording
system can be calibrated by subjecting the transducer to sinusoidal vibrations of known frequencies and amplitudes
for the required ranges so that the overall sensitivity curve can be obtained. The sensitivity curve, normalized to be
equal to unity at 100 Hz, should then fall within the limits given on figure 3.
4.1.2.1.2 Frequency response measurement of auxiliary equipment. If calibration factors given for the
accelerometer are such that when used with the associated equipment it will not affect the overall frequency
response, then the frequency response of only the amplifier-recording system may be determined. This shall be
determined in the following manner: Disconnect the accelerometer from the input terminals of its amplifier. Connect
a signal voltage source to these terminals. The impedance of the signal voltage source as seen by the amplifier shall
be made as the impedance of the accelerometer and associated circuitry as seen by the amplifier. With the
frequency of the signal voltage set at 100 Hz, adjust the magnitude of the voltage to be equal to the product of the
accelerometer sensitivity and the acceleration magnitude expected during test conditions. Adjust the system gain to
a convenient value. Maintain a constant input voltage and sweep the input frequency over the range from 1.0 to
9,000 Hz, or 4 to 25,000 Hz, as applicable, depending on duration of pulse. The frequency response in terms of dB
shall be within the limits given on figure 3.
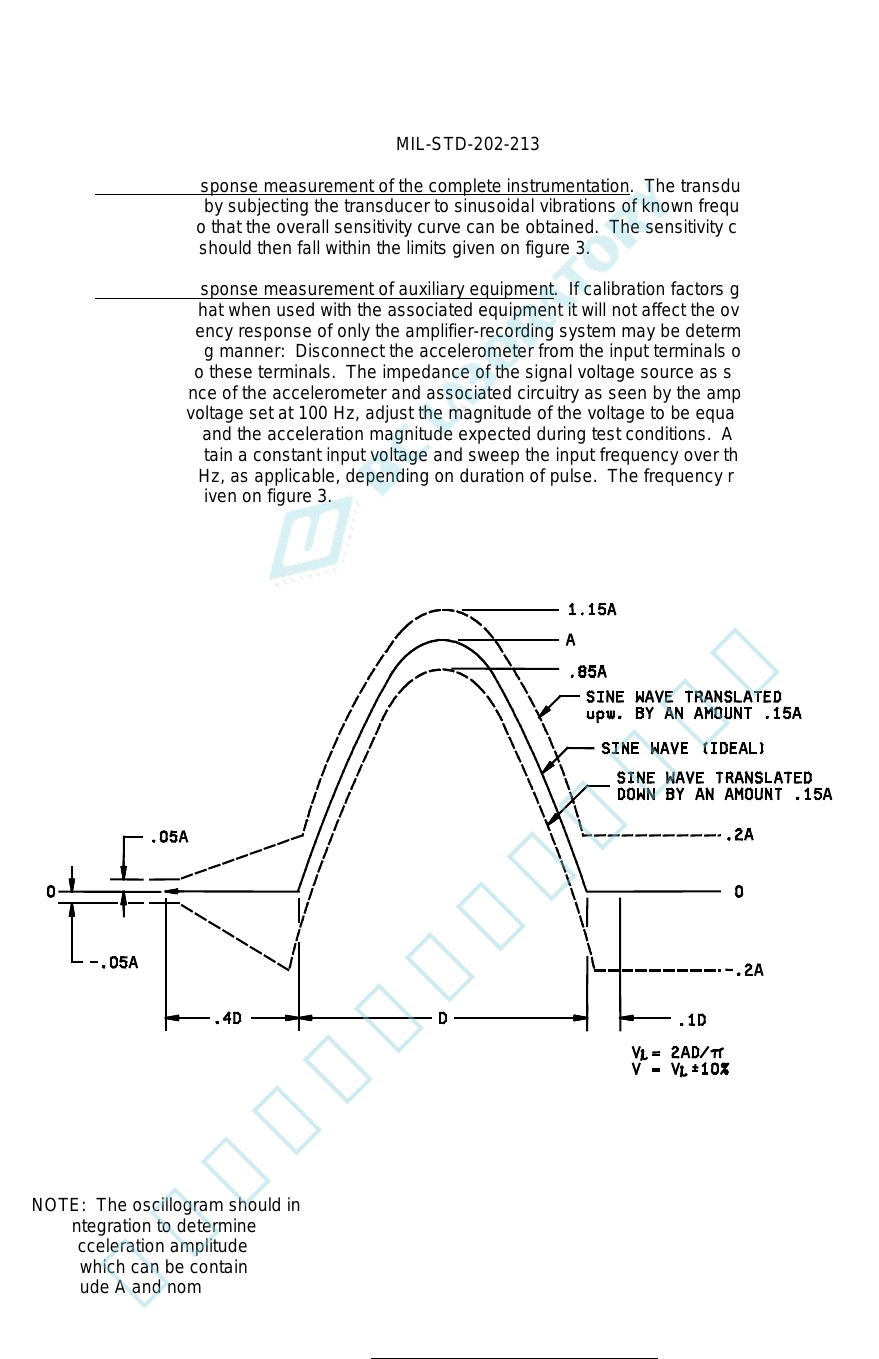
NOTE: The oscillogram should include a time about 3D long with the pulse located approximately in the center.
The integration to determine velocity change should extend from .4D before the pulse to .1D beyond the pulse.
The acceleration amplitude of the ideal half sine pulse is A and its duration is D. Any measured acceleration
pulse which can be contained between the broken line boundaries is a nominal half sine pulse of nominal
amplitude A and nominal duration D. The velocity change associated with the measured acceleration pulse is V.
FIGURE 1. Tolerances for half sine shock pulse.
2
北测(上海)电子科技有限公司
联系方式:xuyj@beice-sh.com 13917165676