FX-2_动作说明书.pdf - 第10页
Rev1.0 动作说明书 2-3 2-2 . Y - TBL 轴 (以下记载为 YA 轴) ・ 球螺丝引线 30mm ( 马达平均 1 圈的移动量 ) 马达变换器 ( 转动型变换器 ) 的分辨率为 262,144 pls ( 马达变换器分辨率 ) 因此,平均 1 脉冲的移动量为 30mm / 262,144 pls = 0.114 μ m / pls 电动机端部附属的旋转型编码器进行的半闭环控制 变换器断线的检测 由伺服放大器 进行通信…
Rev1.0
动作说明书
2-2
变换器断线的检测
由伺服放大器进行通信异常检测,当由于编码器电缆脱线、断线等原因造成通信异常时,发生警报并断
开伺服。如发生警报,伺服驱动器令动态制动器动作,对电动机进行制动使之停止。所发生的警报显示
如下所示。
线性编码器的异常 回转式编码器的异常
电源 ON 定序时 ALM70 ALM16
电源 ON 定序时之外 ALM71 ALM20
控制异常的检测
当回转式编码器和线性编码器(磁尺)的位置偏差量为 100kpulse(回转式编码器的约 3/4 转)以上
时,或两者的速度偏差量为 400rpm 以上时,由伺服驱动器发生警报 ALM42(全闭环控制故障),伺
服断开。如发生警报,伺服驱动器令动态制动器动作,对电动机进行制动使之停止。
Rev1.0
动作说明书
2-3
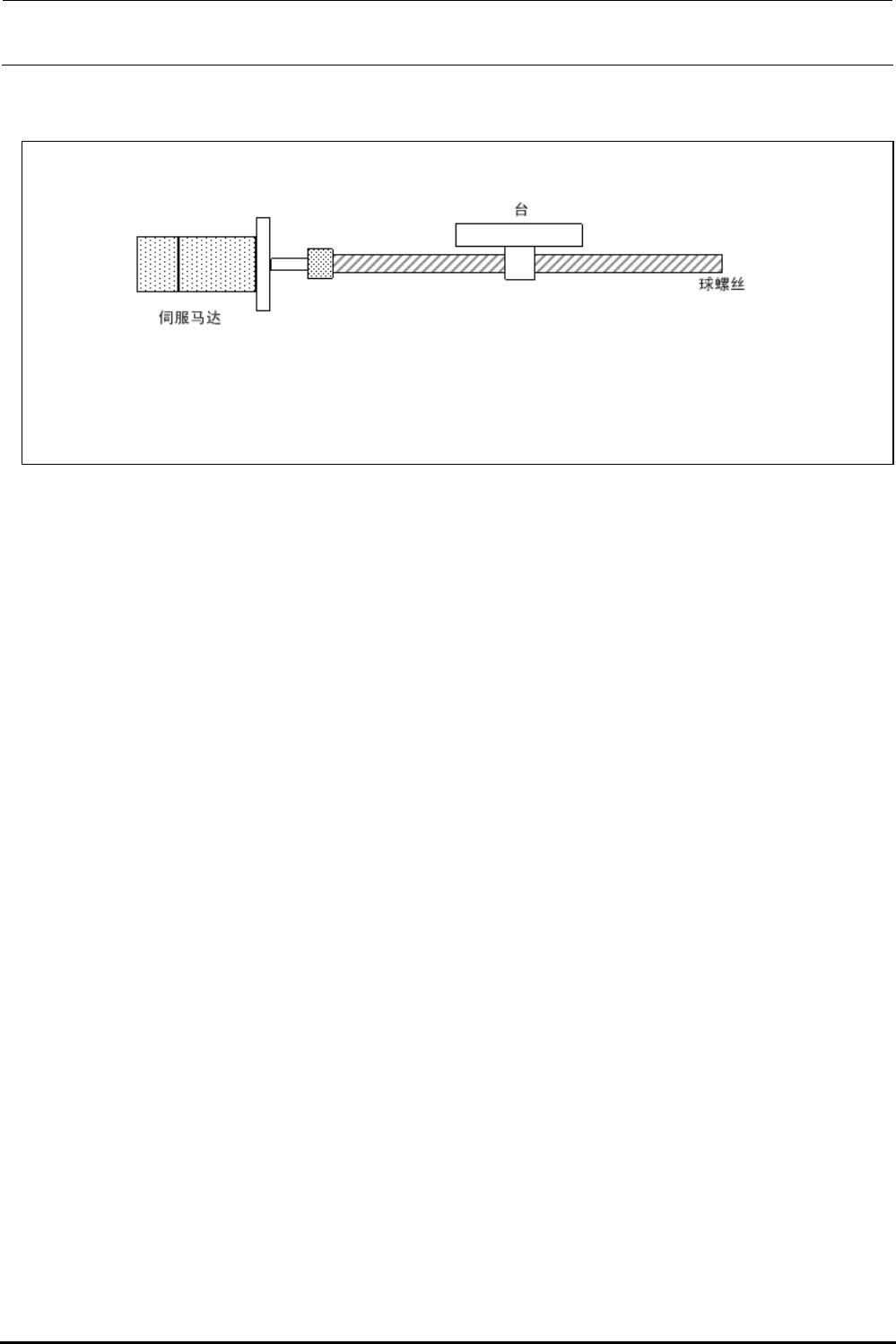
2-2.Y-TBL 轴 (以下记载为 YA 轴)
・球螺丝引线 30mm (马达平均 1 圈的移动量)
马达变换器(转动型变换器)的分辨率为
262,144 pls (马达变换器分辨率)
因此,平均 1 脉冲的移动量为
30mm/262,144 pls=0.114μm/pls
电动机端部附属的旋转型编码器进行的半闭环控制
变换器断线的检测
由伺服放大器进行通信异常检测,当由于编码器电缆脱线、断线等原因造成通信异常时,发生警报
(ALM16: 电源 ON 定序时 ALM20: 电源 ON 定序时之外) 并断开伺服。如发生警报,伺服驱动器令
动态制动器动作,对电动机进行制动使之停止。
马达输出 1500W
图2-2
Rev1.0
动作说明书
2-4
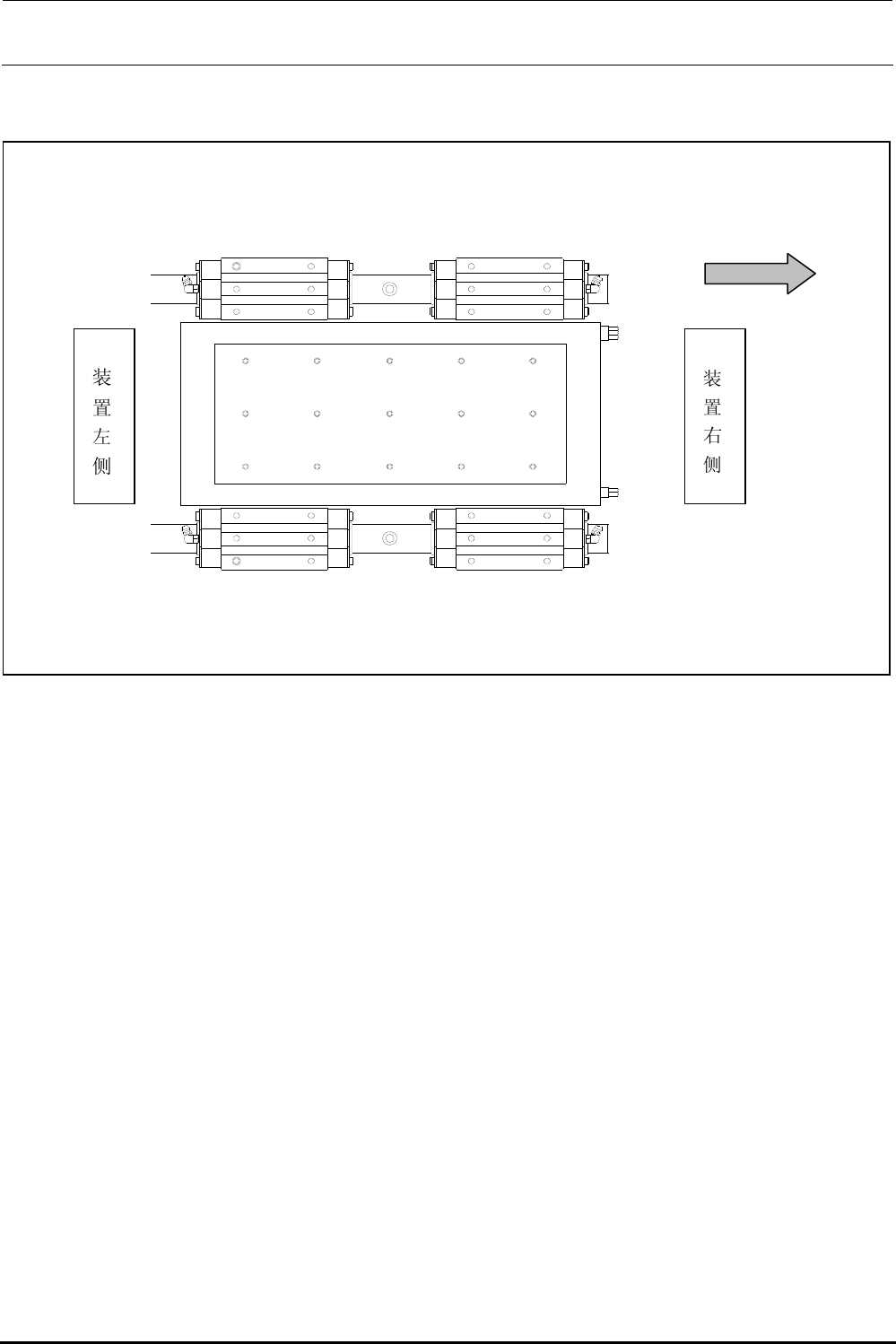
2-3.X 轴
X 轴因为是线性马达,所以仅用线性变换器进行全闭合控制。
FX-2 的线性编码器(磁性膜)的分辨率为 1μm
( XL 马达也一样 )
变换器断线的检测
由伺服放大器进行通信异常检测,当由于编码器电缆脱线、断线等原因造成通信异常时,发生警报
(ALM16: 电源 ON 定序时 ALM20: 电源 ON 定序时之外) 并断开伺服。如发生警报,伺服驱动器令
动态制动器动作,对电动机进行制动使之停止。
控制异常的检测
指令值和标尺值的位置偏差量在 50mm 以上时,或两者的速度偏差量在 1,000mm/s 以上时,伺服驱动
器让动态制动器动作,制动马达。
图2-3
XR 马达
从装置正面看