FX-2_动作说明书.pdf - 第21页
Rev1.0 动作说明书 3-8 YB 轴的原点复位动作∶ 原点復帰方向 原点復帰速度 原点 クリープ速度 モータ速 度 原点シフト量 ORG ( 原点信号 ) ZP(原点復帰完了) NEA R リミット 原点 原点复位方向 原点复位速度 马达速度 夹钳速度 原点提升量 Z P ( 原点复位结束 ) ORG(原点 信号 ) 限位 把 YBL 、 YBR 轴检测出原点传感器的位置设定为 29.5mm 。 YB 轴移动方向的各种位置关系如下…
Rev1.0
动作说明书
3-7
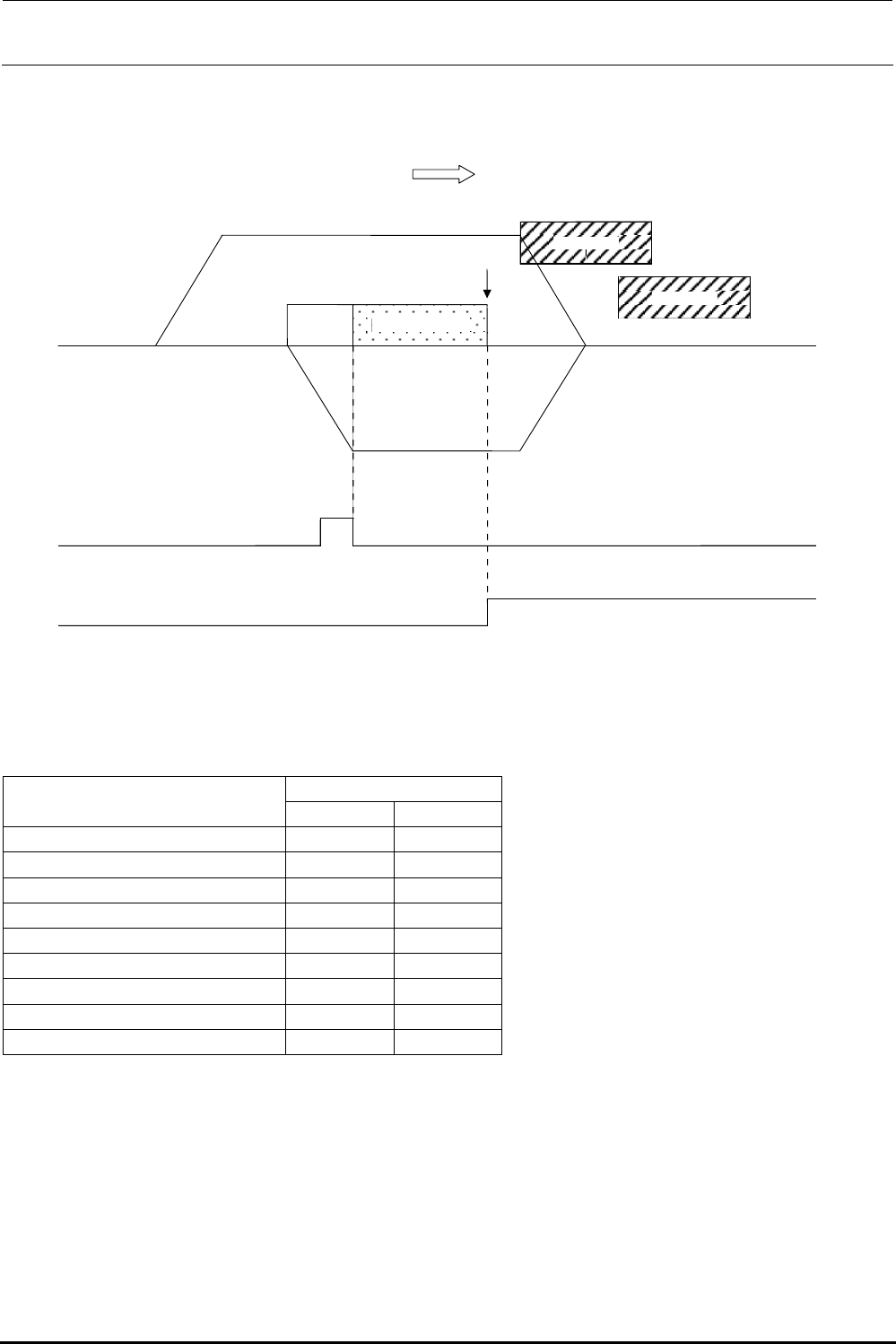
YA 轴的原点复位动作∶
将 YA 轴检测出原点时的位置设定为-340mm。
YA 轴移动方向的各种关系如下所示。
L 基板规格
基准轨道的移动行程范围
(单位 mm)
前侧基准 后侧基准
Origin-Point(X、Y) (0,0) ←
YA 轴原点传感器位置 -340 20
YA 轴 NEAR 传感器位置 -335 25
YA 轴机械限制(-) -360 0
YA 轴硬件限制(-) -355 5
YA 轴软件限制(-) -350 10
YA 轴机械限制(+) 677 1037
YA 轴硬件限制(+) 672 1032
YA 轴软件限制(+) 667 1027
原点复位方向
原点复位速度
马达速度
夹钳速度
原点提升量
NEAR
原点
限制
ORG(原点信号)
ZP(原点复位结束)
Rev1.0
动作说明书
3-8
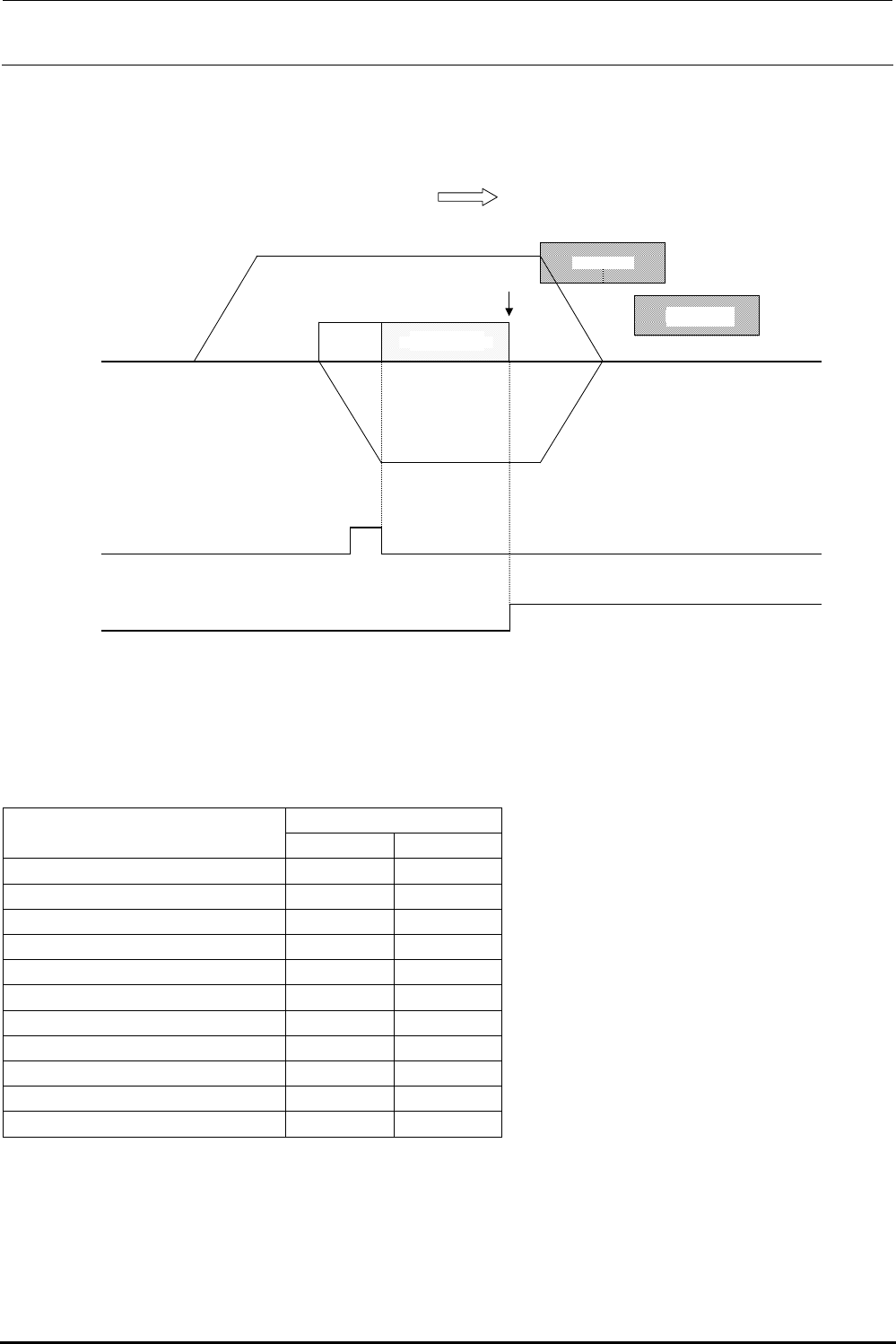
YB 轴的原点复位动作∶
原点復帰方向
原点復帰速度
原点
クリープ速度
モータ速度
原点シフト量
ORG ( 原点信号 )
ZP(原点復帰完了)
NEAR
リミット
原点
原点复位方向
原点复位速度
马达速度
夹钳速度
原点提升量
ZP(原点复位结束)
ORG(原点信号)
限位
把 YBL、YBR 轴检测出原点传感器的位置设定为 29.5mm。
YB 轴移动方向的各种位置关系如下所示。
L 基板规格
从原点的移动行程范围
(单位 mm)
L 贴装头 R贴装头
Origin-Point(X、Y) (0,0) ←
YL 轴原点传感器位置 29.5 ←
YL 轴 NEAR 传感器位置 20 ←
YR 轴原点传感器位置 29.5 ←
YR 轴 NEAR 传感器位置 - ←
Y 机械限制(-) -15 ←
Y 硬件限制(-) -10 ←
Y 软件限制(-) -5 ←
Y 机械限制(+) 742 ←
Y 硬件限制(+) 737 ←
Y 软件限制(+) 732 ←
Rev1.0
动作说明书
3-9
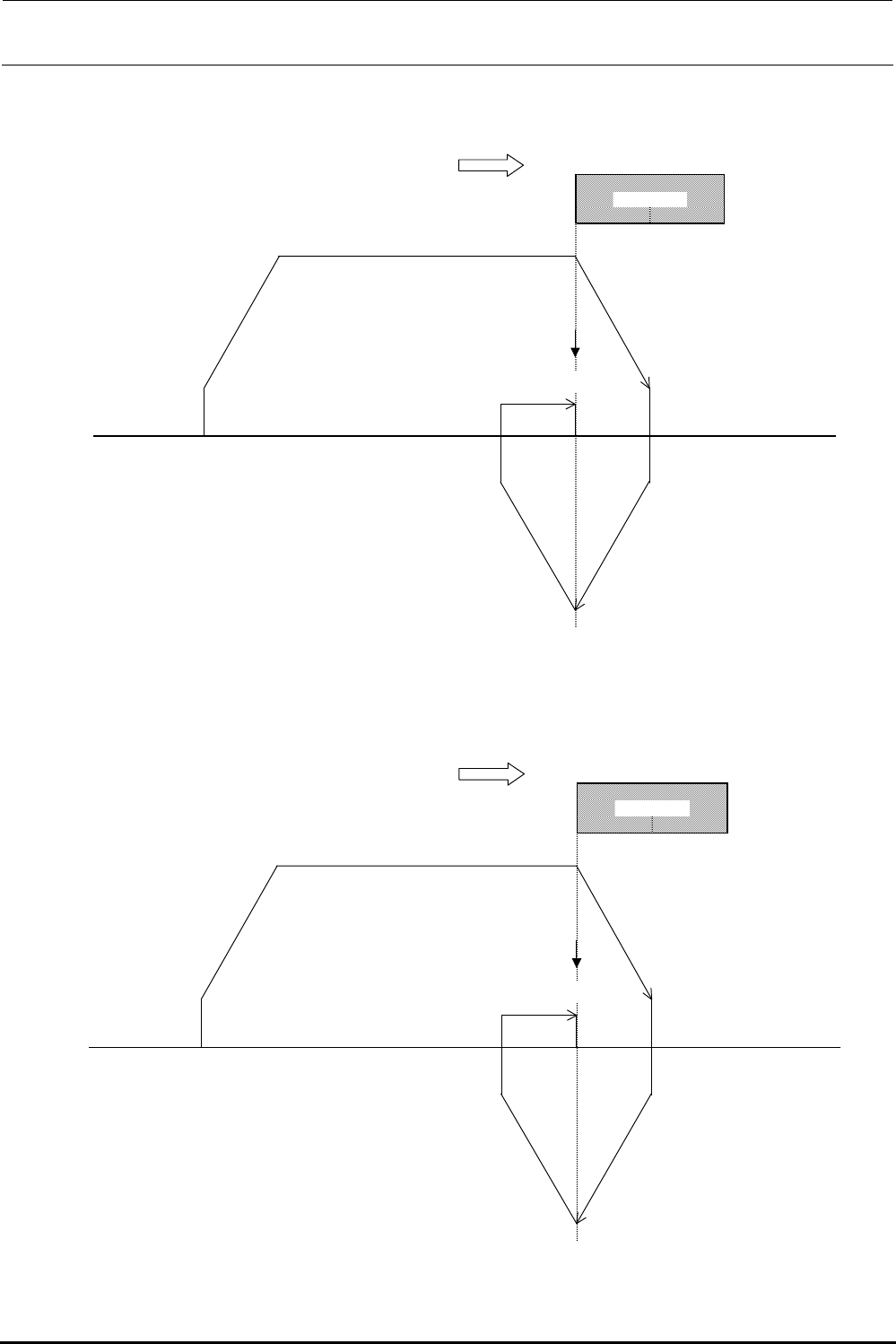
3-2-5.支撑台的原点复位
原点復帰方向
原点復帰速度
原点
モータ速度
クリープ速度
NEAR
原点
原点复位方向
原点复位速度
马达速度
夹钳速度
把宽度调整轴检测出 NEAR 传感器的位置设定为-48mm。
3-2-6.宽度调整马达的原点复位
原点復帰方向
原点復帰速度
原点
モータ速度
クリープ速度
NEAR
原点
原点复位方向
原点复位速度
马达速度
夹钳速度
把宽度调整轴检测出 NEAR 传感器的位置设定为 360mm。