FX-2_动作说明书.pdf - 第48页
Rev1.0 动作说明书 3-35 3-6-4 .θ轴驱动速度·加速度·驱动时间 3-6-4-1 θ 轴速度方式 θ 轴按照下图的三角或台形驱动动作。 θ 轴的最高速度和最高加速度如下。 贴装头 LNC60 θ 轴最高速度 (koos) 112 θ 轴最高加速度 (kpps2) 6670 减速比 1 θ 轴变换器 (pls) 2000 倍率 4 分辨率 (deg/pls) 0.045 转动角 : θ 最高角速度 : ω max- 角加速…
Rev1.0
动作说明书
3-34
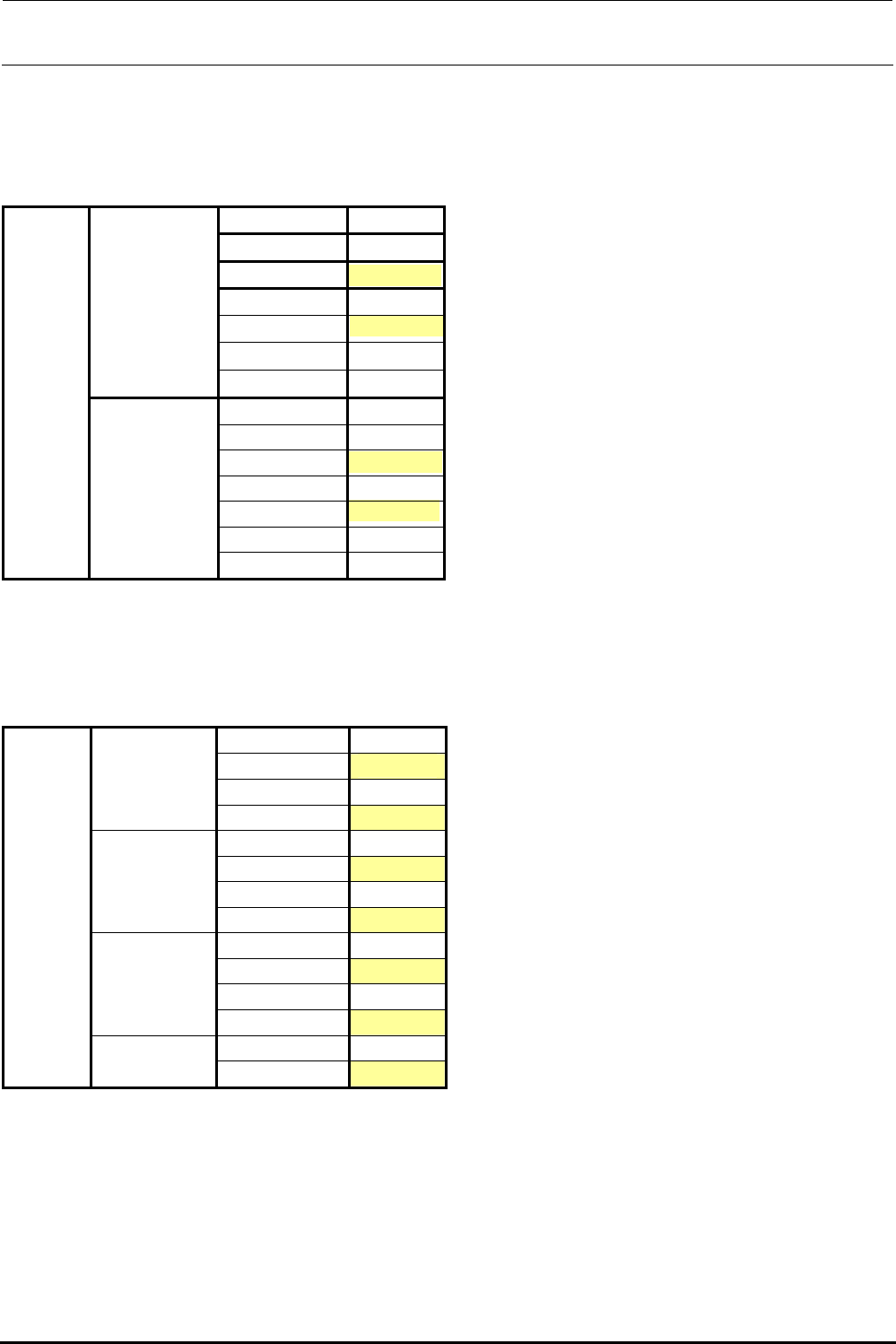
步进移动时的动作
步进移动时的速度、加速度由下法决定。
同时,步进移动时的速度、加速度不取决于罩子开、罩子关。
驱动行程(mm)
0.125
速度(kpps)
150.0
对高速比(%)
25.0
加速度(kpps
2
)
15000.0
对高速比(%)
25.0
驱动时间(ms)
5.2
高速步进
驱动方式 三角驱动
驱动行程(mm)
0.00125
速度(kpps)
60.0
对高速比(%)
10.0
加速度(kpps
2
)
6000.0
对高速比(%)
10.0
驱动时间(ms)
0.8
机种
〔1〕
FX-2
元件高度
6 mm
LNC60
微动步进
驱动方式 三角驱动
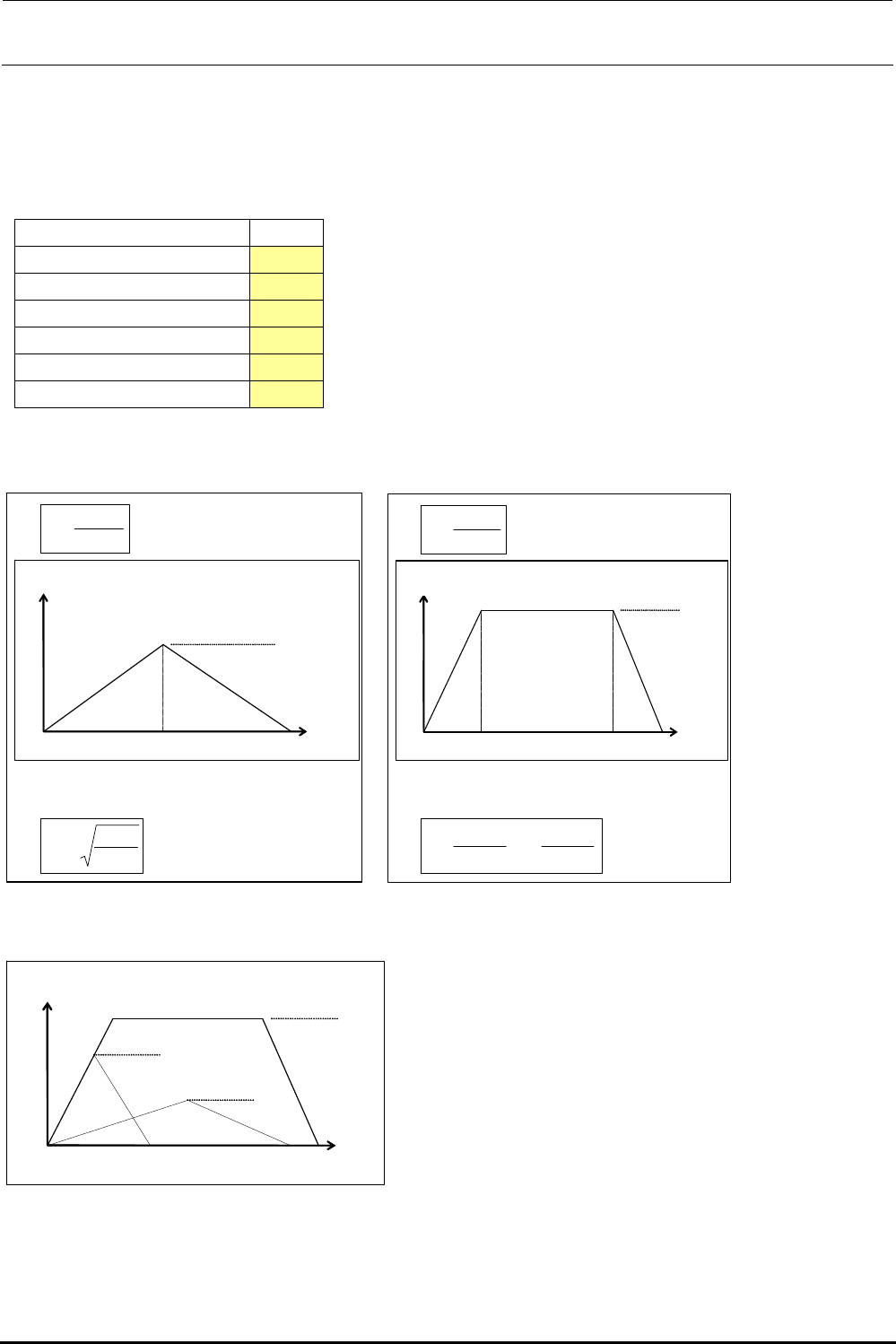
上述之外的其他动作
除了上述原点复位、步进移动之外的 Z 轴移动,其概要如下。
中速、低速、罩子开移动的速度和加速度均分别相当于高速的 50%、25%、10%。
速度(kpps)
600.0
对高速比(%)
100.0
加速度(kpps
2
)
60000.0
高速
对高速比(%)
100.0
速度(kpps)
300.0
对高速比(%)
50.0
加速度(kpps
2
)
30000.0
中速
对高速比(%)
50.0
速度(kpps)
150.0
对高速比(%)
25.0
加速度(kpps
2
)
15000.0
低速
对高速比(%)
25.0
速度(kpps)
60.0
机种
〔1〕
FX-2
元件高度
6 mm
LNC60
护盖开放
对高速比(%)
10.0
Rev1.0
动作说明书
3-35
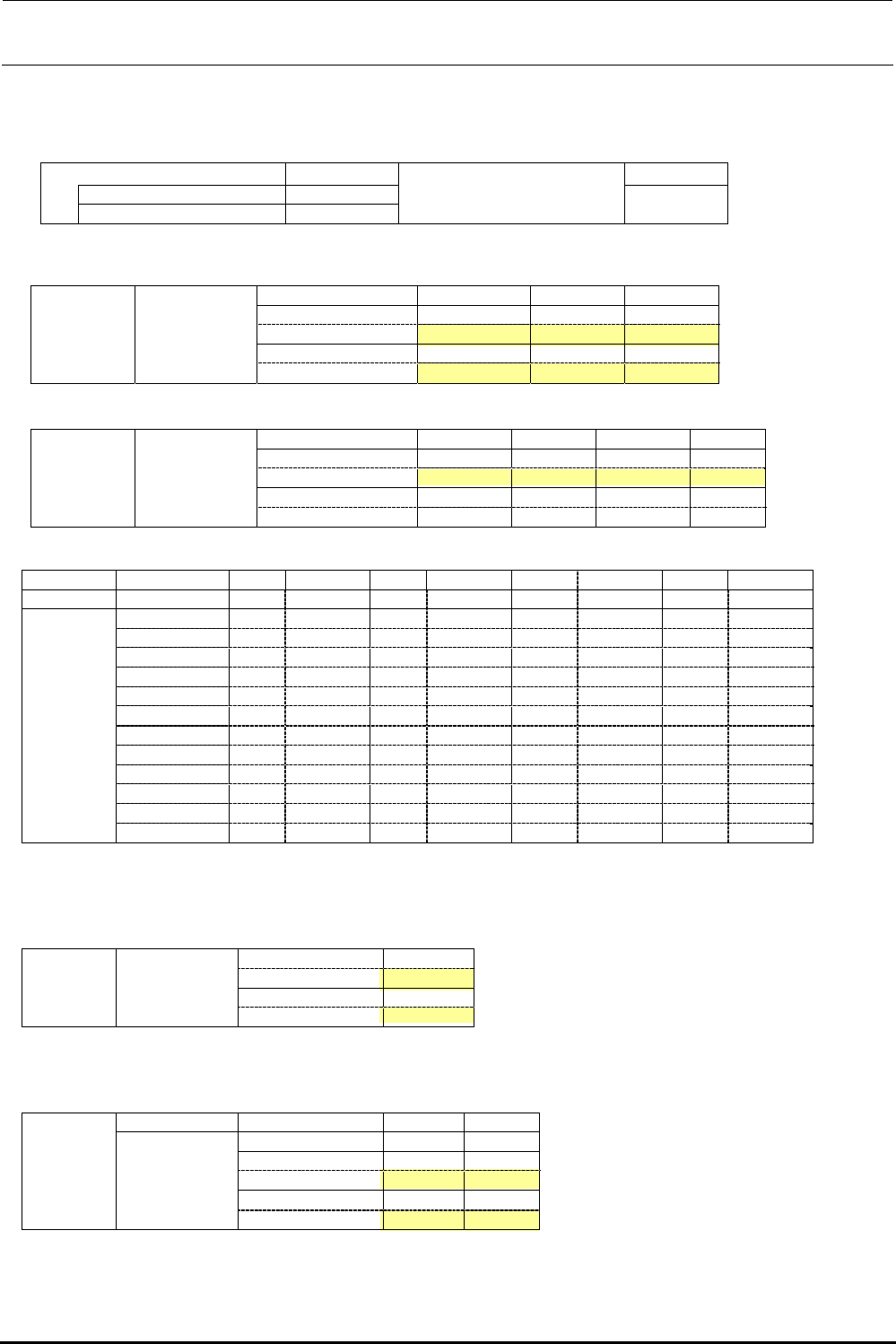
3-6-4.θ轴驱动速度·加速度·驱动时间
3-6-4-1
θ轴速度方式
θ轴按照下图的三角或台形驱动动作。
θ轴的最高速度和最高加速度如下。
贴装头
LNC60
θ轴最高速度(koos)
112
θ轴最高加速度(kpps2)
6670
减速比
1
θ轴变换器(pls)
2000
倍率
4
分辨率(deg/pls)
0.045
转动角: θ
最高角速度:ωmax-
角加速度:β 时
Speed
Time
β
β
0 T1 T
ω
θ
<
β
ω
max
2
When the conditions shown to the
left are satisfied, the triangle drive is
made.
θ-axis movement time calculation formula
In case of triangle drive
T = 2
β
θ
??????
??
??
T?????????
?????
β
β
0 T1
T2
T
ω
max
Speed
Time
θ
-axis movement time calculation formula
In case of trapezoidal drive
T =
+
β
ω
max
θ
≥
β
ω
max
2
When the conditions shown to the
left are satisfied, the trapezoidal drive
is made.
ω
max
θ
??????
??
??
T?????????
?????
转动角小或角加速度小时峰值角都有可能达不到最高速度。
此时的速度方式为图的三角驱动。
Speed
Time
β
ω
ω
β
0
T
ωmax
??
??
时为三角驱动
速度
时间
θ轴移动时间的计算式
三角驱动时
时为台形驱动
速度
时间
θ轴移动时间的计算式
台形驱动时
速度
时间
Rev1.0
动作说明书
3-36
3-6-4-2 θ轴驱动速度、加速度、驱动时间
θ轴的速度、加速度分为测定激光时和测定激光外时,有高速/中速/低速。
θ轴的最高速度/加速度 LNC60 LNC60
θ轴最高速度(kpps) 112
θ轴的最高加速度(kpps2) 6670
θ轴分辨率(deg/pls)
0.045
θ 轴动作速度·加速度
测定激光时的 θ 转动作速度·加速度
高速 中速 低速
角速度(kpps) 80.64 41.664 22.4
对高速比(%) 72 37.2 20
角加速度(kpps2) 3335 590.962 170.752
LA 测定中
LNC60-HEAD
对高速比(%) 50 8.86 2.56
测定激光外时的 θ 轴转动速度·加速度
高速 中速 低速 超低速
角速度(kpps) 112 67.2 22.4 11.2
对高速比(%) 100 60 20 10
角加速度(kpps2) 6670 3335 133.4 66.7
LA 测定外
LNC60-HEAD
对高速比(%) 100 50 2 1
θ 轴动作时间 (单位 ms)
转动角度(deg) 高速 速度方式 中速 速度方式 低速 速度方式 超低速 速度方式
LA 测定中 150 65.5 台形驱动 150.5 台形驱动 280.0 台形驱动
30 20.0 三角驱动 28.3 三角驱动 141.4 三角驱动 200.0 三角驱动
60 28.3 三角驱动 40.0 三角驱动 200.0 三角驱动 282.8 三角驱动
90 34.6 台形驱动 49.9 台形驱动 244.9 三角驱动 346.5 台形驱动
120 40.6 台形驱动 59.8 台形驱动 282.8 三角驱动 406.0 台形驱动
150 46.6 台形驱动 69.8 台形驱动 316.1 三角驱动 465.5 台形驱动
180 52.5 台形驱动 79.7 台形驱动 346.5 台形驱动 525.1 台形驱动
210 58.5 台形驱动 89.6 台形驱动 376.2 台形驱动 584.6 台形驱动
240 64.4 台形驱动 99.5 台形驱动 406.0 台形驱动 644.1 台形驱动
270 70.4 台形驱动 109.4 台形驱动 435.8 台形驱动 703.6 台形驱动
300 76.3 台形驱动 119.4 台形驱动 465.5 台形驱动 763.2 台形驱动
330 82.3 台形驱动 129.3 台形驱动 395.3 台形驱动 822.7 台形驱动
LA 测定外
360 88.2 台形驱动 139.2 台形驱动 525.1 台形驱动 882.2 台形驱动
θ 轴 其他动作
原点复位时的 θ 轴转动速度,加速度如下规定。
另外,原点复位时的速度、加速度与防护盖开放关闭无关。
角速度(kpps) 122.4
对高速比(%) 20
角加速度(kpps2) 133.4
原点复位
LNC60-HEAD
对高速比(%) 2
(注)没有吸附元件时适用低速。
步骤移动时的速度、加速度如下规定。
另外、原点复位时的速度、加速度与防护盖开放关闭无关。
高速 微小
移动角度(pls) 100 1
角速度(kpps) 28 11.2
对高速比(%) 25 10
角加速度(kpps2) 1667.5 1000.5
步进
LNC60-HEAD
对高速比(%) 25 15