FX-2_动作说明书.pdf - 第67页
Rev1.0 动作说明书 3-54 3-11 . BOC 标记识别 3-11-1 .动作时间 B O C 标记识别时的 XY 轴动作和识别装置的动作时间如下所示。 ① 开始了 BOC 识别动作之后,在 BOC 标记识别位置, XY 轴开始移动的同时,发送向识别装置和向 BOC 摄像机的变换指令。此时 BOC 灯也亮灯。 ② 移动到 BOC 标记识别位置之后,发送识别装置的 BOC 标记识别指令。 ③ 接收到从识别装置读取标记的画像完了的…
Rev1.0
动作说明书
3-53
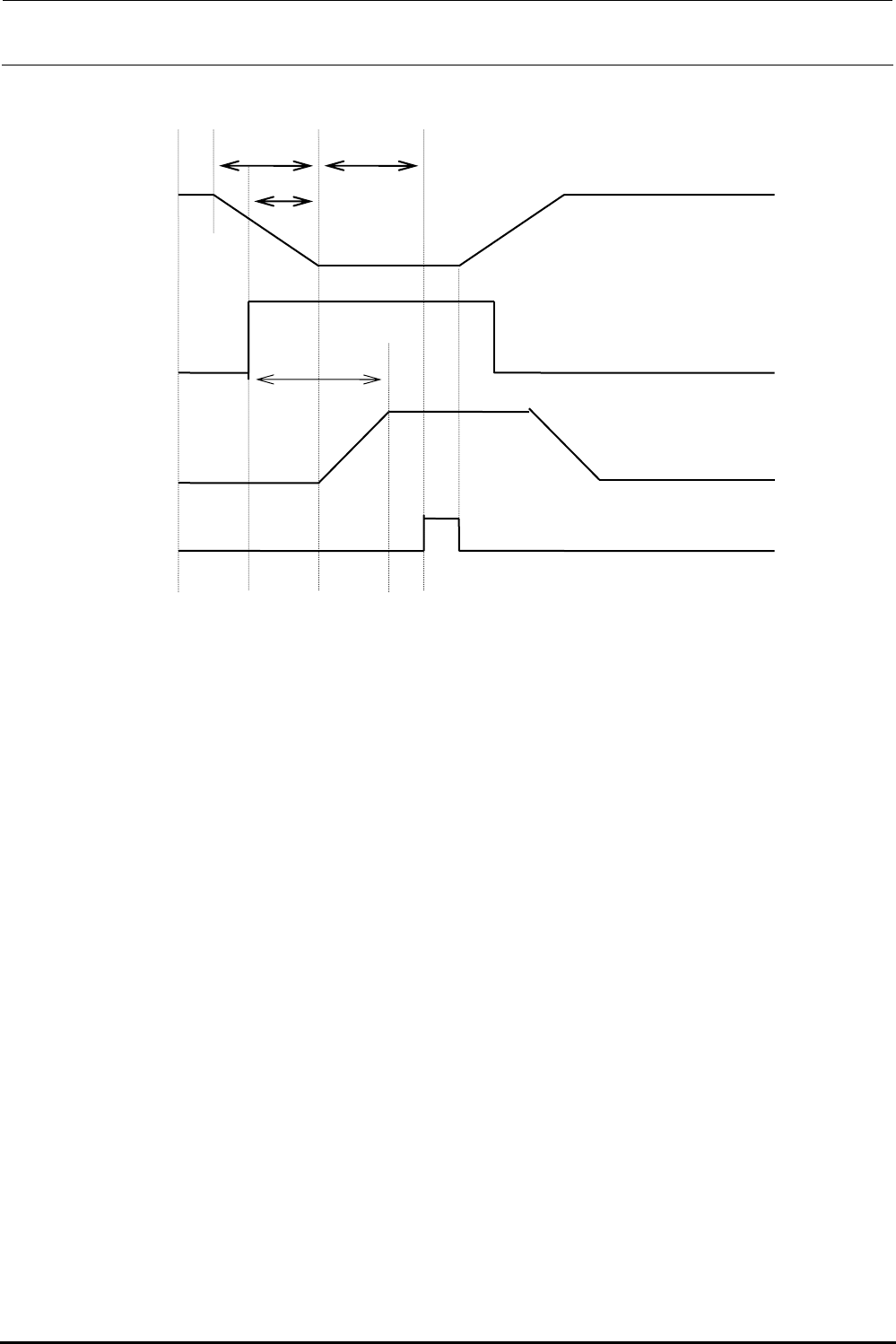
③ 32mm 纸粘合式带式供料器
40 80 (待机时间)
5~10
UP
Z轴
DOWN
ON
吸嘴检测传感器
OFF 74
压出
气缸
拉进
↑ ↑
真空检测 ① ②
単位 : msec
① 带剥离动作时间
② 元件传送动作时间
Rev1.0
动作说明书
3-54
3-11.BOC 标记识别
3-11-1.动作时间
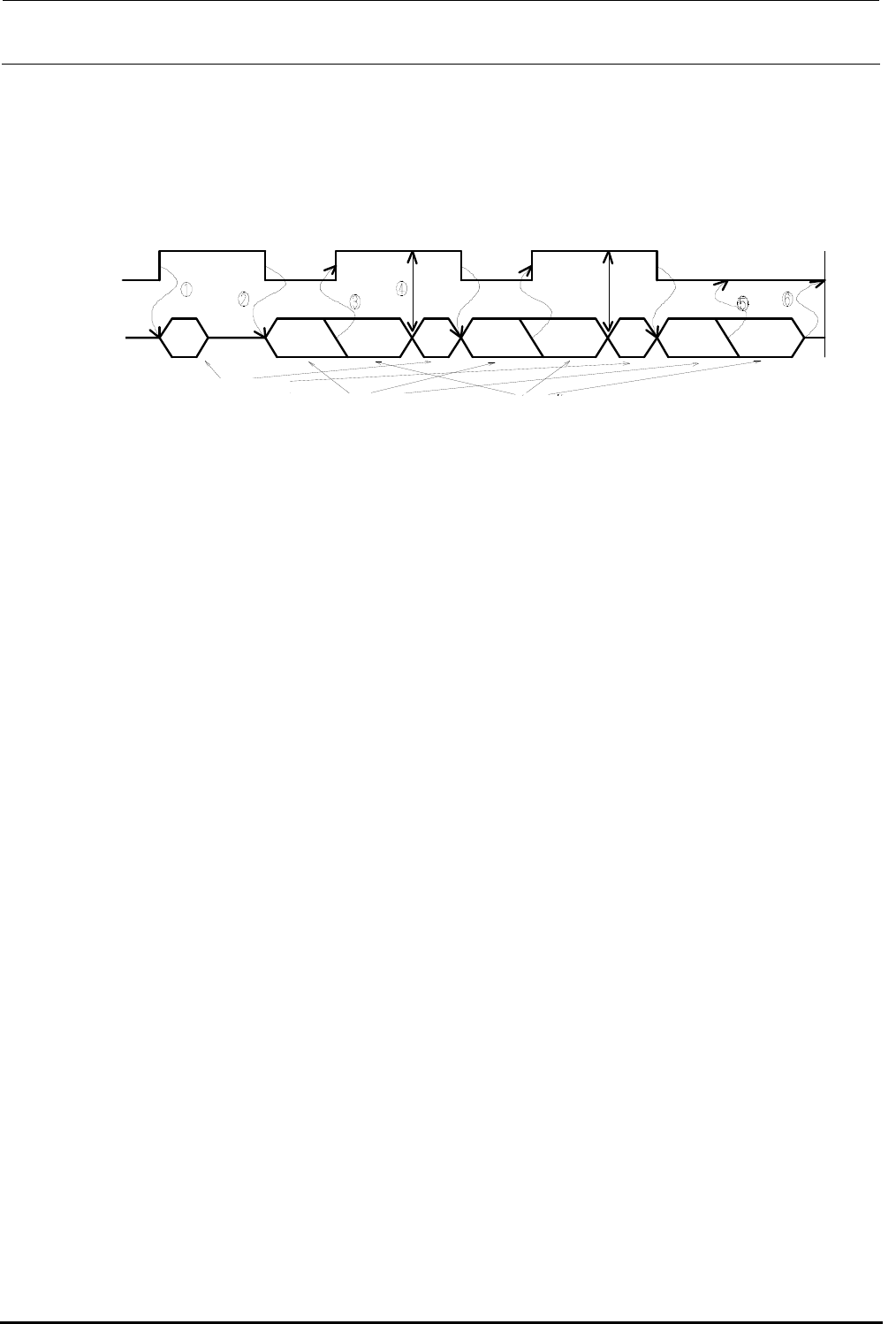
BOC标记识别时的 XY 轴动作和识别装置的动作时间如下所示。
① 开始了 BOC 识别动作之后,在 BOC 标记识别位置,XY 轴开始移动的同时,发送向识别装置和向
BOC 摄像机的变换指令。此时 BOC 灯也亮灯。
② 移动到 BOC 标记识别位置之后,发送识别装置的 BOC 标记识别指令。
③ 接收到从识别装置读取标记的画像完了的信号之后,开始把 XY 轴移动到下一个标记的识别位置。此时,
识别装置继续进行标记的识别处理。
④ 接收到从识别装置发来的识别结果之后,再次发送摄像机变换指令。
⑤ 反复②~④的操作,直到最后的 BOC 标记,接收到最后的 BOC 标记图像读取完了的信息之后,BOC
灯灭灯。
⑥ 待机接收最后的 BOC 标记的识别结果,进行下一个动作。
3-11-2.识别顺序
标记的识别顺序考虑到识别所花费的移动时间,以最优化的识别次序进行识别。
并未根据 BOC 位置的输入顺序进行识别。
XY轴
识别装置
变换摄像机
读取图像
识别标记
接下一动作
图3-11-1
Rev1.0
动作说明书
3-55
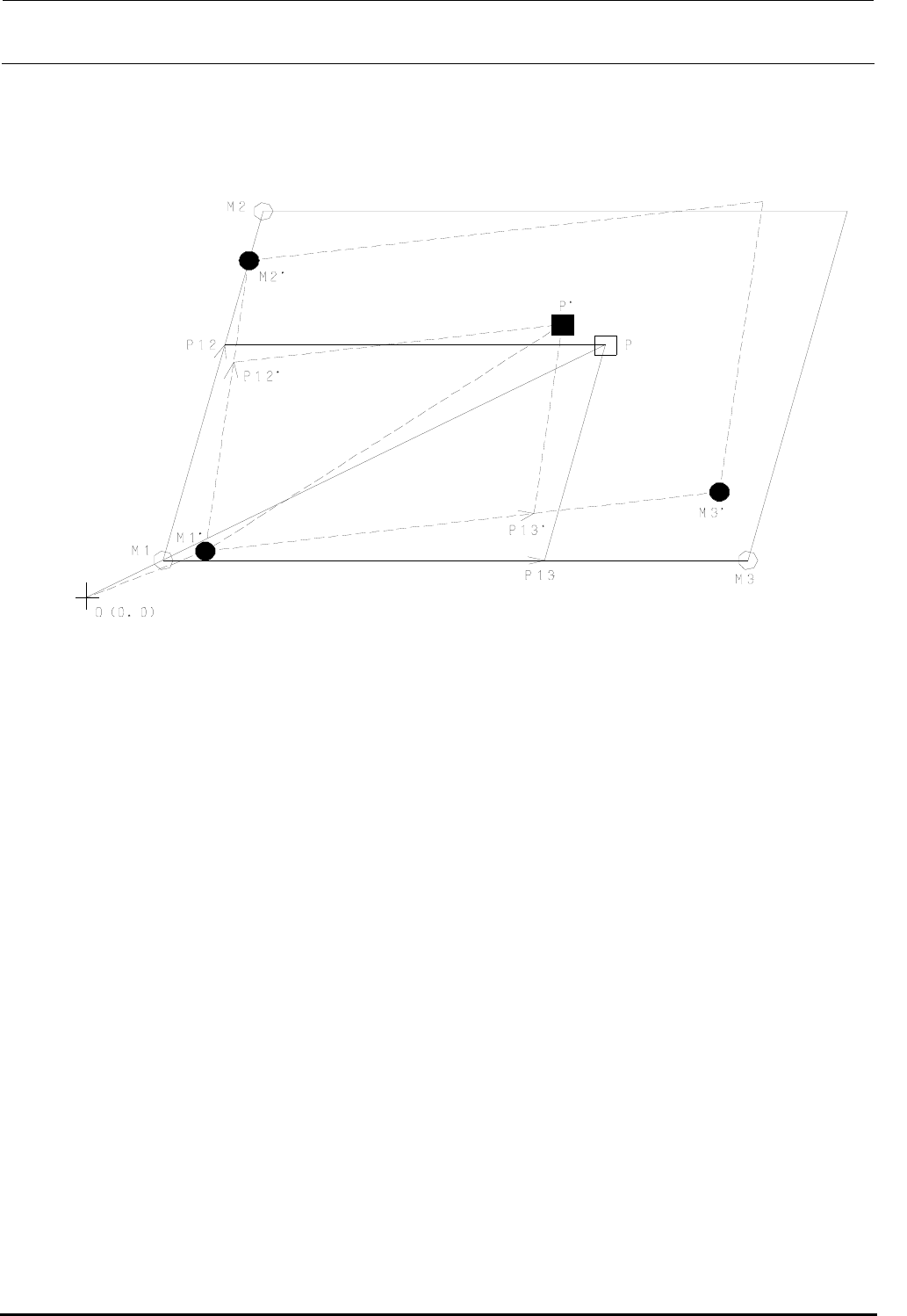
3-11-3.指定标记的修正方法
3 点的 BOC 标识时(区域指定标记也一样)
上图的○显示的点M1,M2,M3是基板数据种的 BOC 标记坐标,经各个点的识别求得得实际坐标为●显示
的M1’、M2’、M3’时,计算对应贴装数据上的贴装坐标P点(□)的实际贴装坐标P’点(■)。
此时,基板也同样地移动、变形的话,让通过M1,M2,M3的 3 点内的 2 点的直线内的 2 条作为坐标轴的斜
交坐标系上的 P 点的坐标值相等,求对应M1,M2,M3的M1’、M2’、M3’的同样的斜交坐标系上的P’点的
O为原点的直交坐标上的坐标。
此时,从P向斜交坐标轴平行地引的直线和连接M1、M2的直线,连接P12、M1、M3的直线的焦点作为P13,
P’也同样连接M1’、M2’的直线、连接M1’、M3’的直线的焦点分别作为P12’、P13’。
(M1→P)=(M1→P13)+(M1→P12) ①
(M1’→P’)=(M1’→P13’)+(M1’→P12’) ②
即成立以上的关系。
再根据P’的定义
|M1→P12|/|M1→M2| =|M1’→P12’|/|M1’→M2’| ③
|M1→P13|/|M1→M3| =|M1’→P13’|/|M1’→M3’| ④
则成立以上的关系。
这里,把③式的值作为A,把④式的值作为B的式子①②可以表示以下的事情。
(
M
1→P)=B(M1→M3)+A(M1→M2) ⑤
(M1’→P’)=B(M1’→M3’)+A(M1’→M2’) ⑥
图3-11-3