FX-2_动作说明书.pdf - 第50页
Rev1.0 动作说明书 3-37 3-7. 芯片跳起检测 3-7-1 .概要 进行芯片检测的时间是, 吸附后, XY 开始移动和同时进行的激光测定后进行。 芯片跳起检测是把 Z 轴移 动到被吸附的元件厚度计算出的高度,用激光进行扫描,来判定有无检测出的元件。除实施芯 片跳起检 测之外,还可以用元件数据或后备数据来选择。进行芯片跳起检测之后,有可能发生因 XY 的移动距离、 吸附方法等造成循环周期推迟的现象。 3-7-2 .判定方法 芯…
Rev1.0
动作说明书
3-36
3-6-4-2 θ轴驱动速度、加速度、驱动时间
θ轴的速度、加速度分为测定激光时和测定激光外时,有高速/中速/低速。
θ轴的最高速度/加速度 LNC60 LNC60
θ轴最高速度(kpps) 112
θ轴的最高加速度(kpps2) 6670
θ轴分辨率(deg/pls)
0.045
θ 轴动作速度·加速度
测定激光时的 θ 转动作速度·加速度
高速 中速 低速
角速度(kpps) 80.64 41.664 22.4
对高速比(%) 72 37.2 20
角加速度(kpps2) 3335 590.962 170.752
LA 测定中
LNC60-HEAD
对高速比(%) 50 8.86 2.56
测定激光外时的 θ 轴转动速度·加速度
高速 中速 低速 超低速
角速度(kpps) 112 67.2 22.4 11.2
对高速比(%) 100 60 20 10
角加速度(kpps2) 6670 3335 133.4 66.7
LA 测定外
LNC60-HEAD
对高速比(%) 100 50 2 1
θ 轴动作时间 (单位 ms)
转动角度(deg) 高速 速度方式 中速 速度方式 低速 速度方式 超低速 速度方式
LA 测定中 150 65.5 台形驱动 150.5 台形驱动 280.0 台形驱动
30 20.0 三角驱动 28.3 三角驱动 141.4 三角驱动 200.0 三角驱动
60 28.3 三角驱动 40.0 三角驱动 200.0 三角驱动 282.8 三角驱动
90 34.6 台形驱动 49.9 台形驱动 244.9 三角驱动 346.5 台形驱动
120 40.6 台形驱动 59.8 台形驱动 282.8 三角驱动 406.0 台形驱动
150 46.6 台形驱动 69.8 台形驱动 316.1 三角驱动 465.5 台形驱动
180 52.5 台形驱动 79.7 台形驱动 346.5 台形驱动 525.1 台形驱动
210 58.5 台形驱动 89.6 台形驱动 376.2 台形驱动 584.6 台形驱动
240 64.4 台形驱动 99.5 台形驱动 406.0 台形驱动 644.1 台形驱动
270 70.4 台形驱动 109.4 台形驱动 435.8 台形驱动 703.6 台形驱动
300 76.3 台形驱动 119.4 台形驱动 465.5 台形驱动 763.2 台形驱动
330 82.3 台形驱动 129.3 台形驱动 395.3 台形驱动 822.7 台形驱动
LA 测定外
360 88.2 台形驱动 139.2 台形驱动 525.1 台形驱动 882.2 台形驱动
θ 轴 其他动作
原点复位时的 θ 轴转动速度,加速度如下规定。
另外,原点复位时的速度、加速度与防护盖开放关闭无关。
角速度(kpps) 122.4
对高速比(%) 20
角加速度(kpps2) 133.4
原点复位
LNC60-HEAD
对高速比(%) 2
(注)没有吸附元件时适用低速。
步骤移动时的速度、加速度如下规定。
另外、原点复位时的速度、加速度与防护盖开放关闭无关。
高速 微小
移动角度(pls) 100 1
角速度(kpps) 28 11.2
对高速比(%) 25 10
角加速度(kpps2) 1667.5 1000.5
步进
LNC60-HEAD
对高速比(%) 25 15
Rev1.0
动作说明书
3-37
3-7. 芯片跳起检测
3-7-1.概要
进行芯片检测的时间是,吸附后,XY 开始移动和同时进行的激光测定后进行。芯片跳起检测是把 Z 轴移
动到被吸附的元件厚度计算出的高度,用激光进行扫描,来判定有无检测出的元件。除实施芯片跳起检
测之外,还可以用元件数据或后备数据来选择。进行芯片跳起检测之后,有可能发生因 XY 的移动距离、
吸附方法等造成循环周期推迟的现象。
3-7-2.判定方法
芯片跳起主要适用于方芯片和柱形芯片,把系数加上元件数据输入的元件厚度 t 计算出的值作为激光高度
进行扫描。
元件尺寸
正常吸附 横跳起 纵跳起 斜跳起
激光高度
( 1005、2125 的系数为 1.25 时 )
正常吸附时,无元件的数据被反馈,但是芯片跳起状态,因为激光遮掩元件,所以此时判定为芯片跳起,退
出芯片。
Rev1.0
动作说明书
3-38
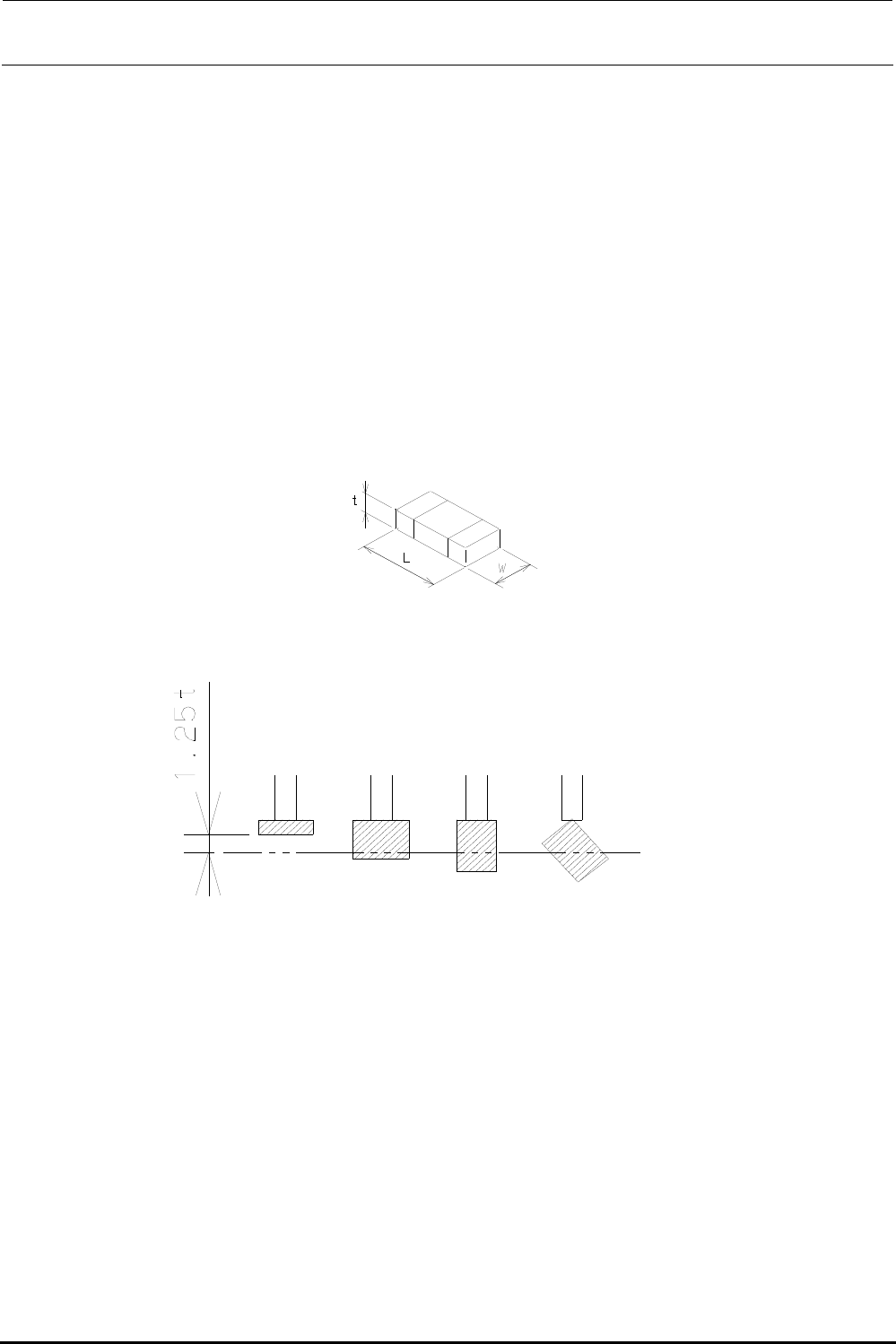
元件 1005、2125 时的系数定为 1.25 的理由如下。
1005 电阻时,元件尺寸 t=0.35、W=0.5mm,把检测横跳起吸附的高度集中到下图间隙的中央时,接近于
1.25×t,所以
(0.35+0.5)/2=1.25×0.35 。
正常吸附
横跳起吸附
激光
Scan高度
瞄准缝隙的中央
1)
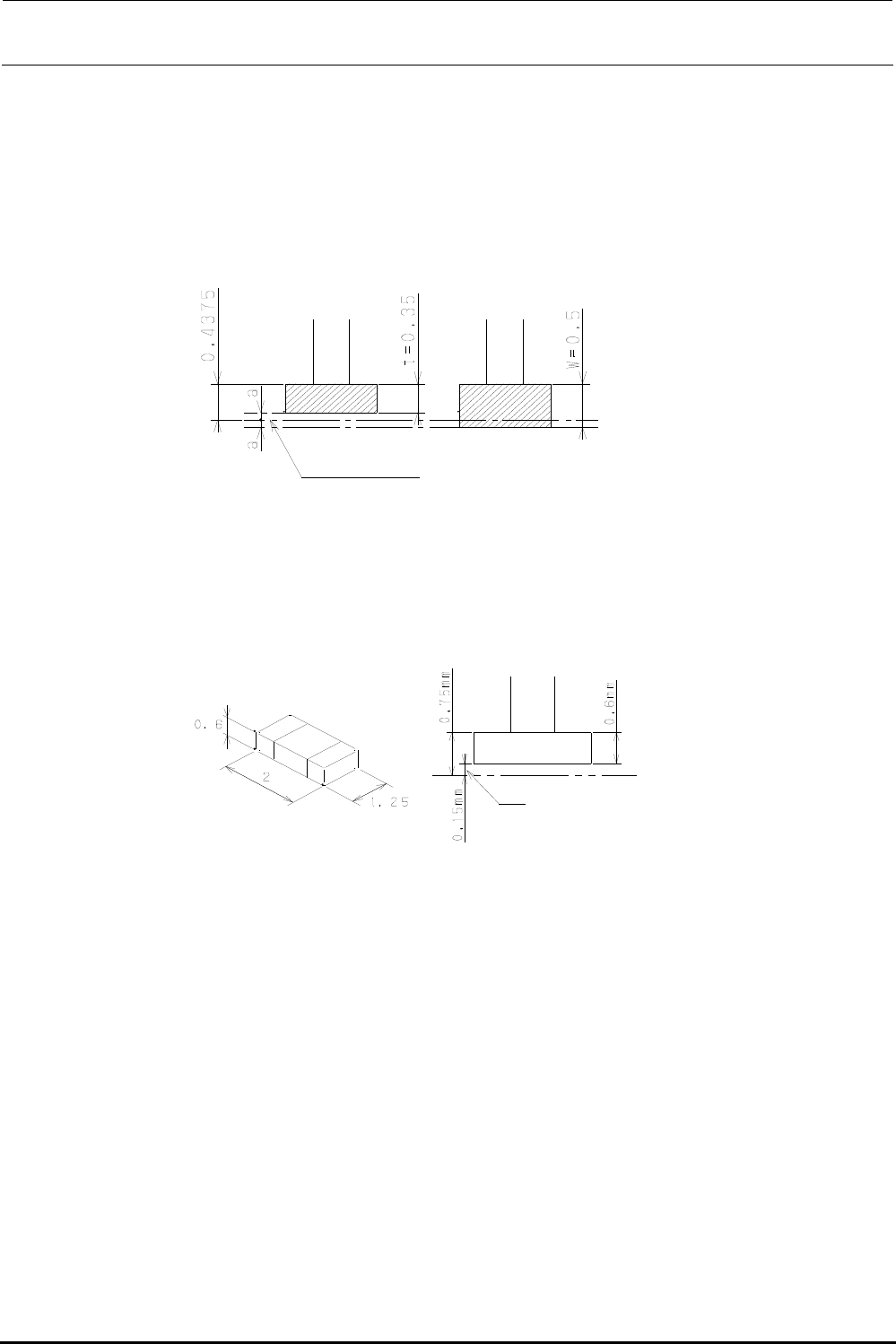
如果元件高度的输入值与实际尺寸不同时,虽然能正常吸附但是也被退出。
2125R 时 t=0.6mm 芯片跳起 Scan 高度为 0.6×1.25=0.75。
间隙
激光
Scan高度
如果元件高度被错误地输入为 0.4mm 的话,Scan 高度为 0.5mm(0.4×1.25),虽然能正常吸附,但是
也被判定为跳起,此时必须通过自动测量元件高度来输入真值。