FX-2_动作说明书.pdf - 第98页
Rev1.0 动作说明书 5-22 5-2-2 . Z , θ 轴的控制方式 Z 、 θ 轴的电动机控制采用半闭环控制方式,在 Z 轴是进行元件的贴装及吸取等上下动作,在 θ 轴是进行元 件激光识别及角度校正等旋转动作。 Z 轴及 θ 轴的控制组成图如下所示。 LNC 贴装头用 Z θ 轴 图 5-2-4 LNC 贴装头用 Z θ 轴 方块图 位置 控制板 CPCI 接口 SSCNET Ⅲ 光通信 SSCNET Ⅲ 光通信 SSCNET…
Rev1.0
动作说明书
5-21
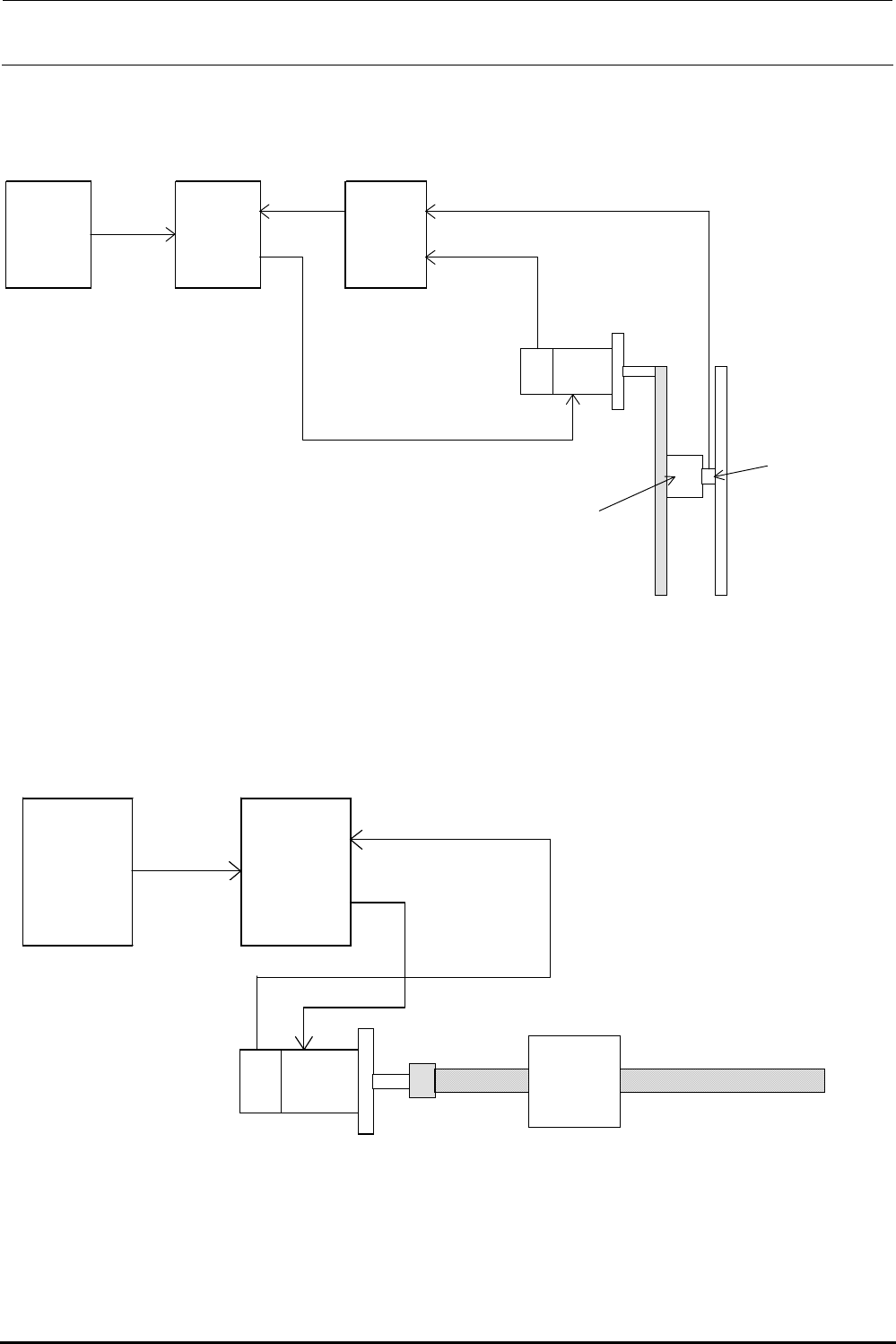
② YB 轴
エンコーダ入力
I/Fユニット
モータ駆動電流
U、V、W 相
スケールヘッド
ステージ
ベルト マグネスケール
リニアエンコーダ信号
(マグネスケール)
ロータリーエンコーダ信号
サーボモータ
位置制御
信号
位置フィード
バック信号
ポジションボード YB軸 ドライバ
SSCNETⅡ
位置接口板
位置控制
信号
YB轴驱动器
位置供料
反馈信号
线性变换器信号
(磁标尺)
旋转变换器信号
伺服马达
变换器输入
I/F装置
马达驱动电流
台
标尺头
皮带
磁标尺
图5-2-2
YB 轴全交叉减弱方式
③ YA 轴
モータ駆動電流
U、V、W 相
ボールネ
ジ
ポジションボード YA軸 ドライバ
SSCNETⅡ
位置制御
ロータリーエンコーダ信号
ステージサーボモータ
信号
位置接口板
位置控制
信号
YA轴驱动器
伺服马达
旋转变换器信号
马达驱动电流
台
球螺丝
图5-2-3
YA 轴的半交叉减弱方式
Rev1.0
动作说明书
5-22
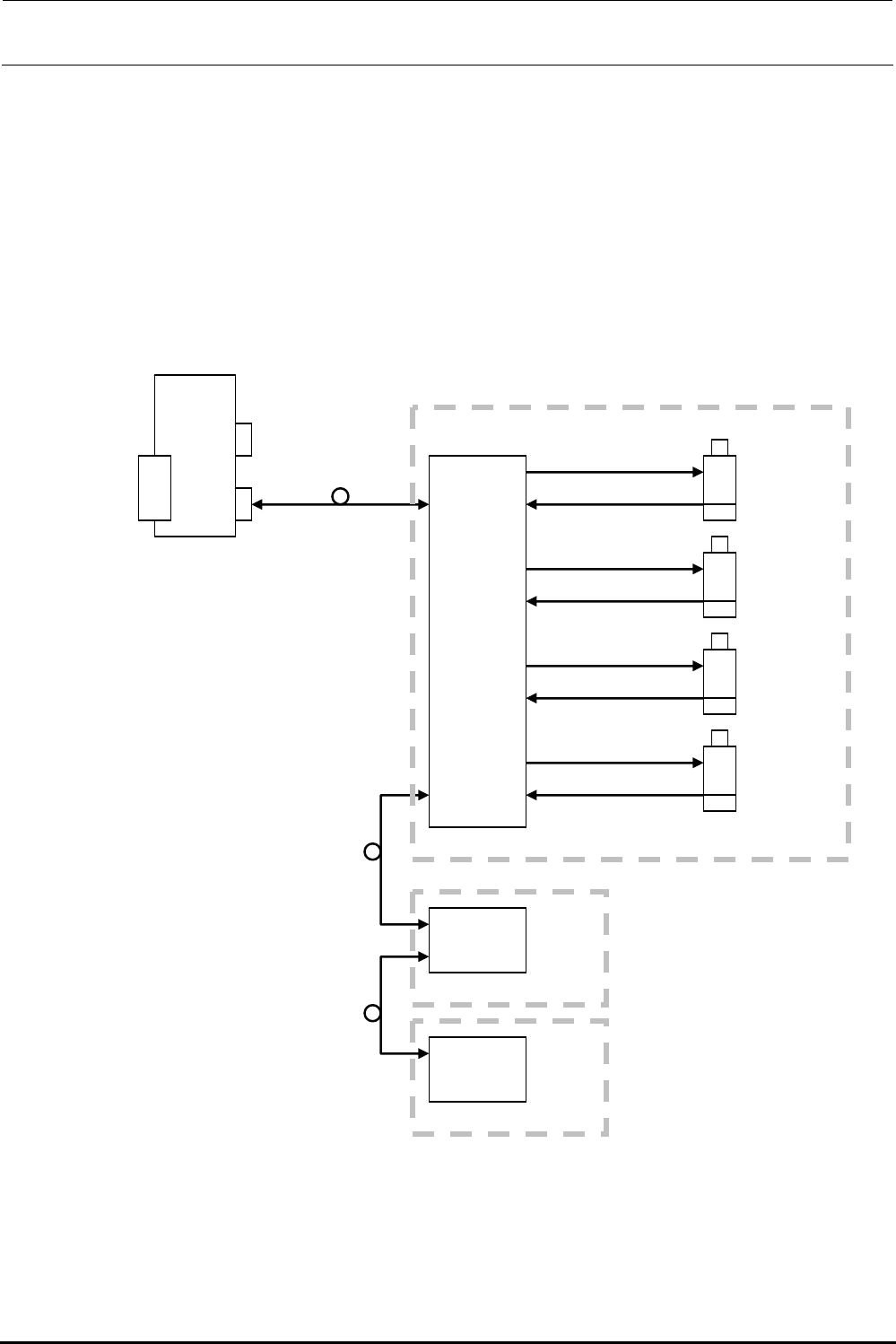
5-2-2.Z,θ 轴的控制方式
Z、θ轴的电动机控制采用半闭环控制方式,在 Z 轴是进行元件的贴装及吸取等上下动作,在 θ 轴是进行元
件激光识别及角度校正等旋转动作。
Z
轴及θ轴的控制组成图如下所示。
LNC
贴装头用 Zθ轴
图5-2-4
LNC 贴装头用 Zθ轴 方块图
位置 控制板
CPCI
接口
SSCNETⅢ
光通信
SSCNETⅢ
光通信
SSCNETⅢ
光通信
4 轴 1 体
放大器
MR-MD100
UVW 相 出
编码器输出
(三菱串行)
θ 机
Z
机
*A
4 轴 1 体
放大器
*A
4 轴 1 体
放大器
*A
UVW 相 出
编码器输出
(三菱串行)
θ 机
Z
机
UVW 相 出
编码器输出
(三菱串行)
UVW 相 出
编码器输出
(三菱串行)

Rev1.0
动作说明书
5-23
5-2-3.基板传送部的控制方式
①
CENTER 马达
传送基板的 CENTER 使用步进马达,进行定速控制。
② 支撑台马达
进行支撑台的上下移动的支撑台马达用步进马达和变换器控制定位。
③ 基板传送宽度自动调整马达
传送基板时自动进行调整的基板传送宽度自动调整马达,用步进马达和变换器进行控制定位。
CENTER 宽度自动调整为标准,IN/OUT 宽度自动调整为选项。