FX-2_动作说明书.pdf - 第17页
Rev1.0 动作说明书 3-4 3-2-2 .θ轴的原点复位 θ 轴的原点复位动作时,各个贴装头进行下列动作。 原点复位时间 ゙ 処理内容 电源 ON 时的原点复位 ・ 检测马达 Z 相,进行 θ 轴计数器的清零。 ・ 向激光驱动器要求 θ 轴计数器的清零。 第 2 次以后的原点复位 ・ 返回 0 位置。 3-2-3 . Z 轴的原点复位 Z 轴的原点复位动作时的顺序如下所示。 Z 轴原点的复位动作∶ 原点復帰方向 モータ速度 モータ…
Rev1.0
动作说明书
3-3
3-2.原点复位动作
3-2-1.整体的原点复位
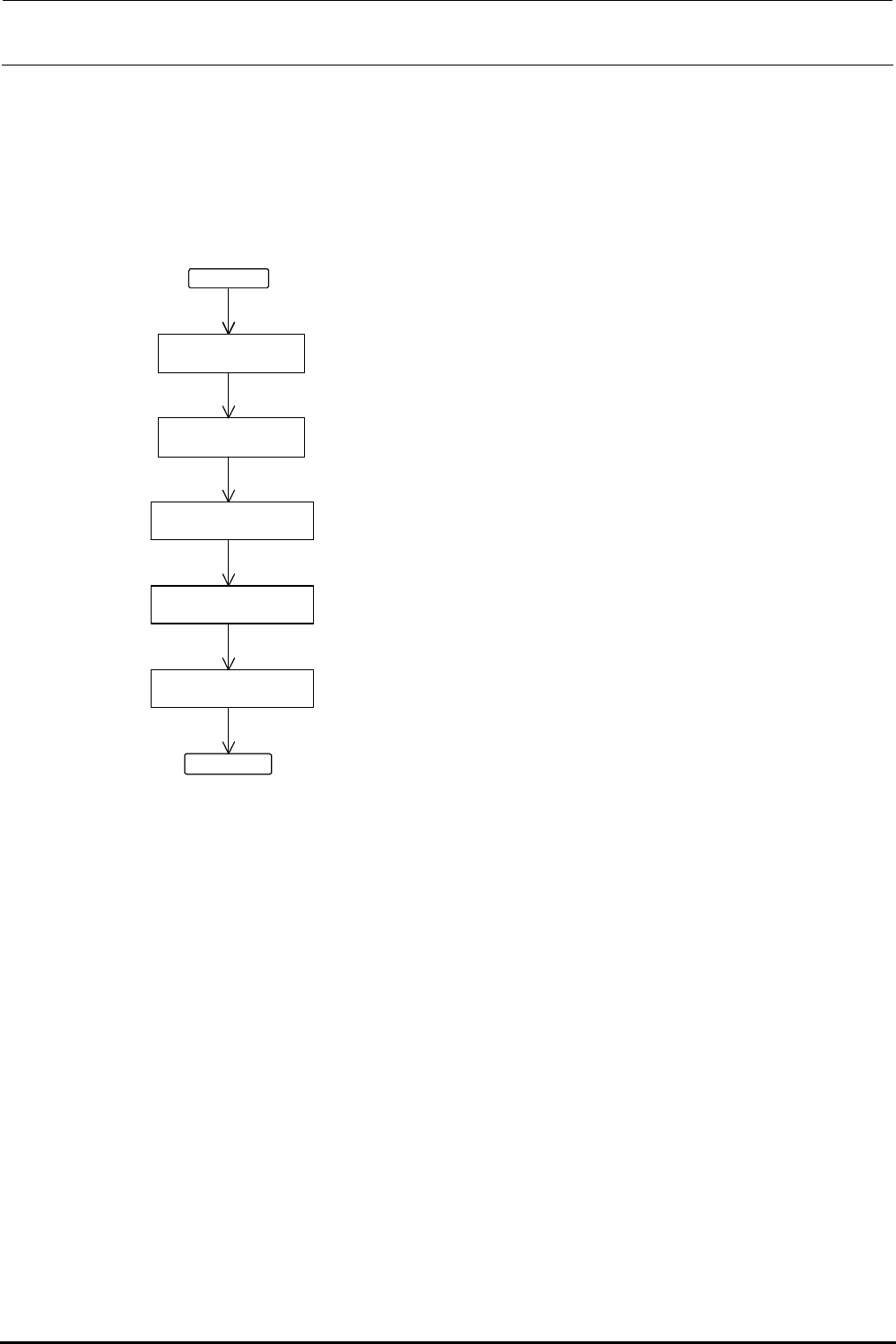
轴整体的原点复位流程如下所示。
START
END
Z、θ轴的
原点复位
YA轴的
原点复位
ST、AWC轴的
原点复位
YB轴的
原点复位
XL、XR轴的
原点复位
原点复位的整体流程
Rev1.0
动作说明书
3-4
3-2-2.θ轴的原点复位
θ轴的原点复位动作时,各个贴装头进行下列动作。
原点复位时间゙ 処理内容
电源 ON 时的原点复位 ・检测马达 Z 相,进行 θ 轴计数器的清零。
・向激光驱动器要求 θ 轴计数器的清零。
第 2 次以后的原点复位 ・返回 0 位置。
3-2-3.Z 轴的原点复位
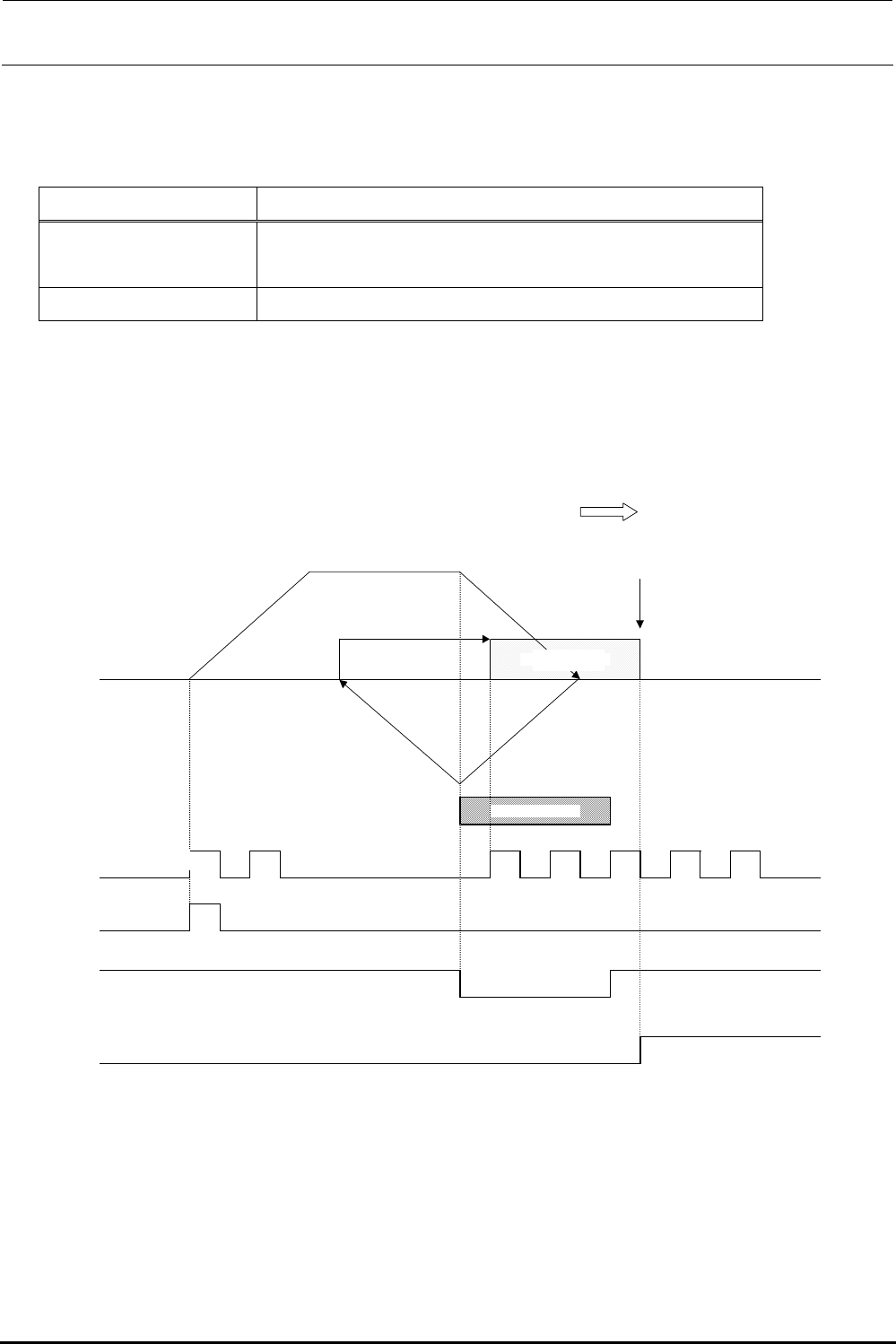
Z 轴的原点复位动作时的顺序如下所示。
Z 轴原点的复位动作∶
原点復帰方向
モータ速度
モータ Z相パルス
ST(運転起動)
NEAR(近点ドグ入力信号)
ZP(原点復帰完了)
原点
NEAR
原点復帰速度
クリープ速度
原点シフト量
原点
原点复位方向
原点复位速度
夹钳速度
马达速度
原点提升量
马达Z相脉冲
ST(运转起动)
ZP (原点复位结束)
NEAR(近点标签输入信号)
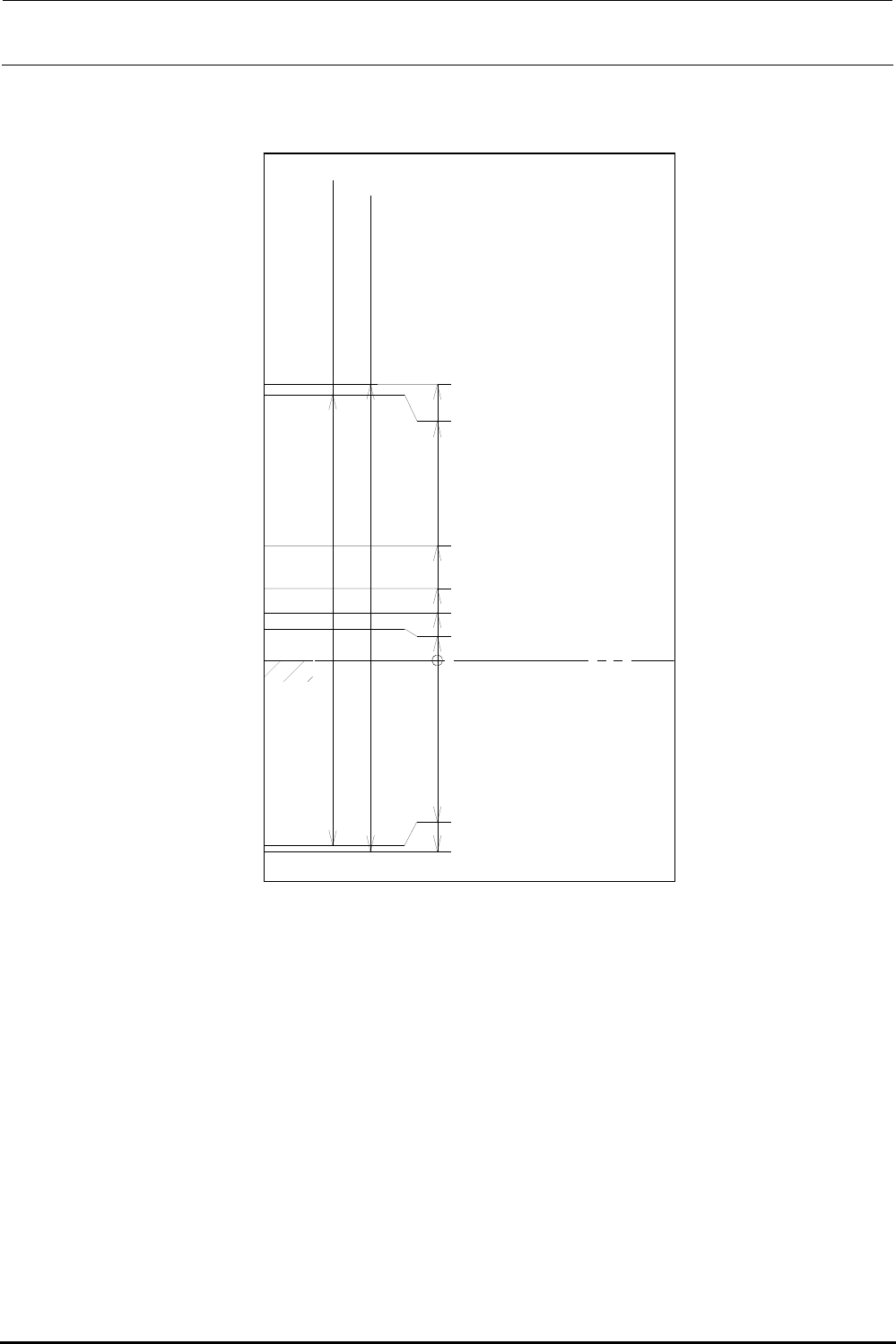
把基板上面位置作为基准 0mm,把检测的原点位置设定为 9mm(上方)。
Z 轴的高度方向的各种位置关系如下所示。
Rev1.0
动作说明书
3-5
Z 轴 高度方向的各种位置关系
85(软件行程)
88(机械行程)
52(机械极限上限)
50(软件极限上限)
21.5(LNC 激光高度)
13.5(LNC 下面高度)
9(XY 移动高度)
6(吸嘴上端)
35(软件极限下限)
36(机械极限下限)