FX-2_动作说明书.pdf - 第33页
Rev1.0 动作说明书 3-20 3-6 . Z θ轴动作 3-6-1 . Z 轴的速度区分 Z 轴、 θ 轴的速度区分 Z 轴 、 θ 轴的速度区分 吸附时的Z轴 贴装时的Z轴 θ 轴 元件种类 最小元件宽度 (W) 下降 上升 下降 上升 测定 测定外 典型的元件 Min ≤ W<0.45 中速 中速 高速 高速 高速 高速 0603 0.45 ≤ W<0.75 高速 高速 高速 高速 高速 高速 1005 0.75 …
Rev1.0
动作说明书
3-19
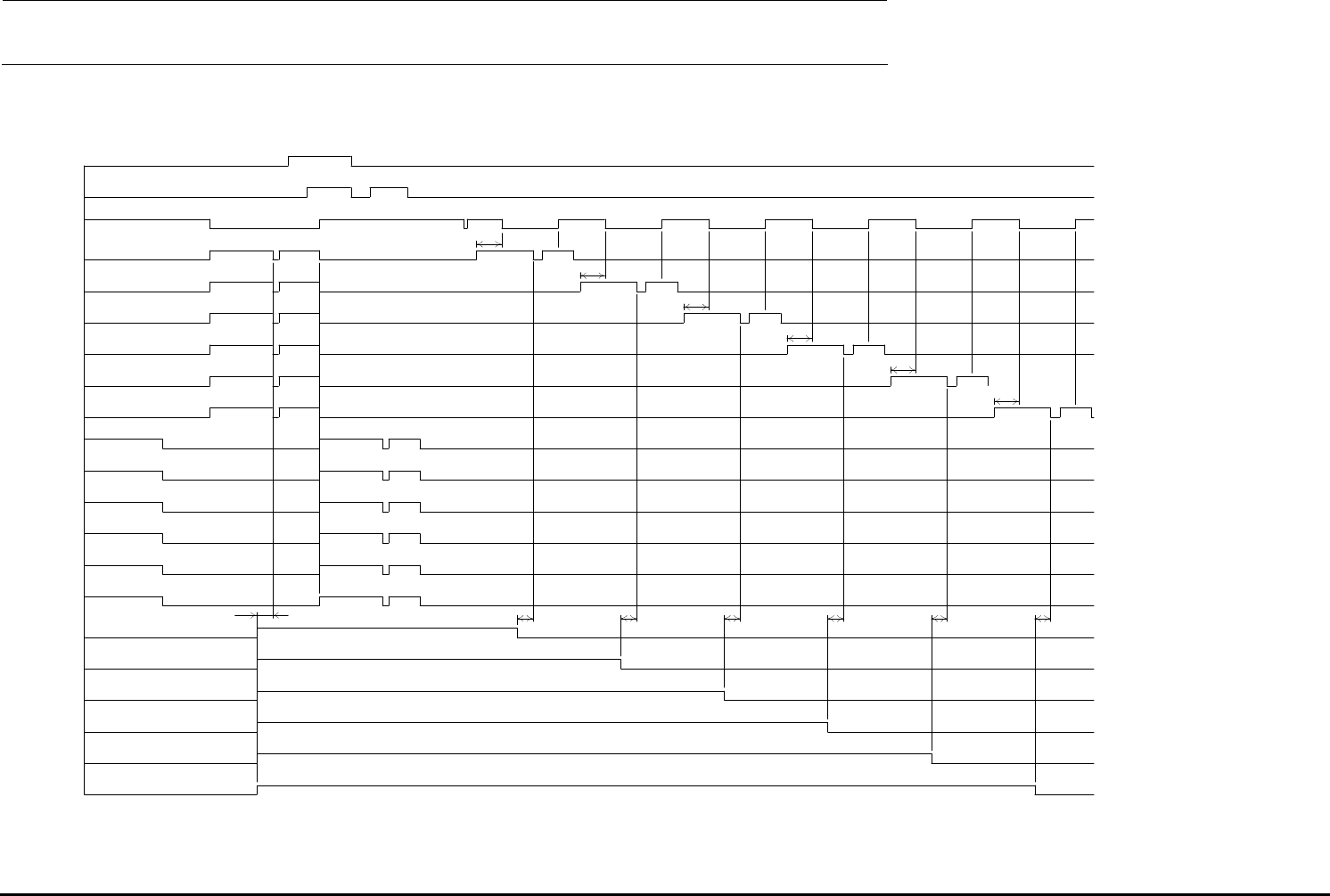
3-5.激光识别元件的贴装流程
VAC-1
VAC-2
VAC-3
VAC-4
VAC-5
VAC-6
B
D
ON
OFF
ON
OFF
C
C
D
ON
OFF
C
C
C
C
D
ON
OFF
D
ON
OFF
D
ON
OFF
D
ON
OFF
ON OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
图3-5 激光识别元件的贴装流程
驱动器缸筒
带供料器
XY 轴
Z 轴-1
Z 轴-2
Z 轴-3
Z 轴-4
Z 轴-5
Z 轴-6
θ 轴-1
θ 轴-2
θ 轴-3
θ 轴-4
θ 轴-5
θ 轴-6
向吸附位置移动
停止
停止 停止
供料动作 返回动作
向贴装位置移动
修正移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向贴装位置
移动
向吸附位置移动
下降
下降
下降
下降
下降
下降
上升
吸附
上升
吸附
上升
吸附
上升
吸附
上升
吸附
上升
吸附
吸附转动
吸附转动
吸附转动
吸附转动
吸附转动
吸附转动
LA 测定 贴装角度
LA 测定 贴装角度
LA 测定 贴装角度
LA 测定 贴装角度
LA 测定 贴装角度
LA 测定 贴装角度
下降 上升
下降 上升
下降 上升
下降 上升
下降 上升
下降 上升
吸附转动
吸附转动
吸附转动
吸附转动
吸附转动
吸附转动
Rev1.0
动作说明书
3-20
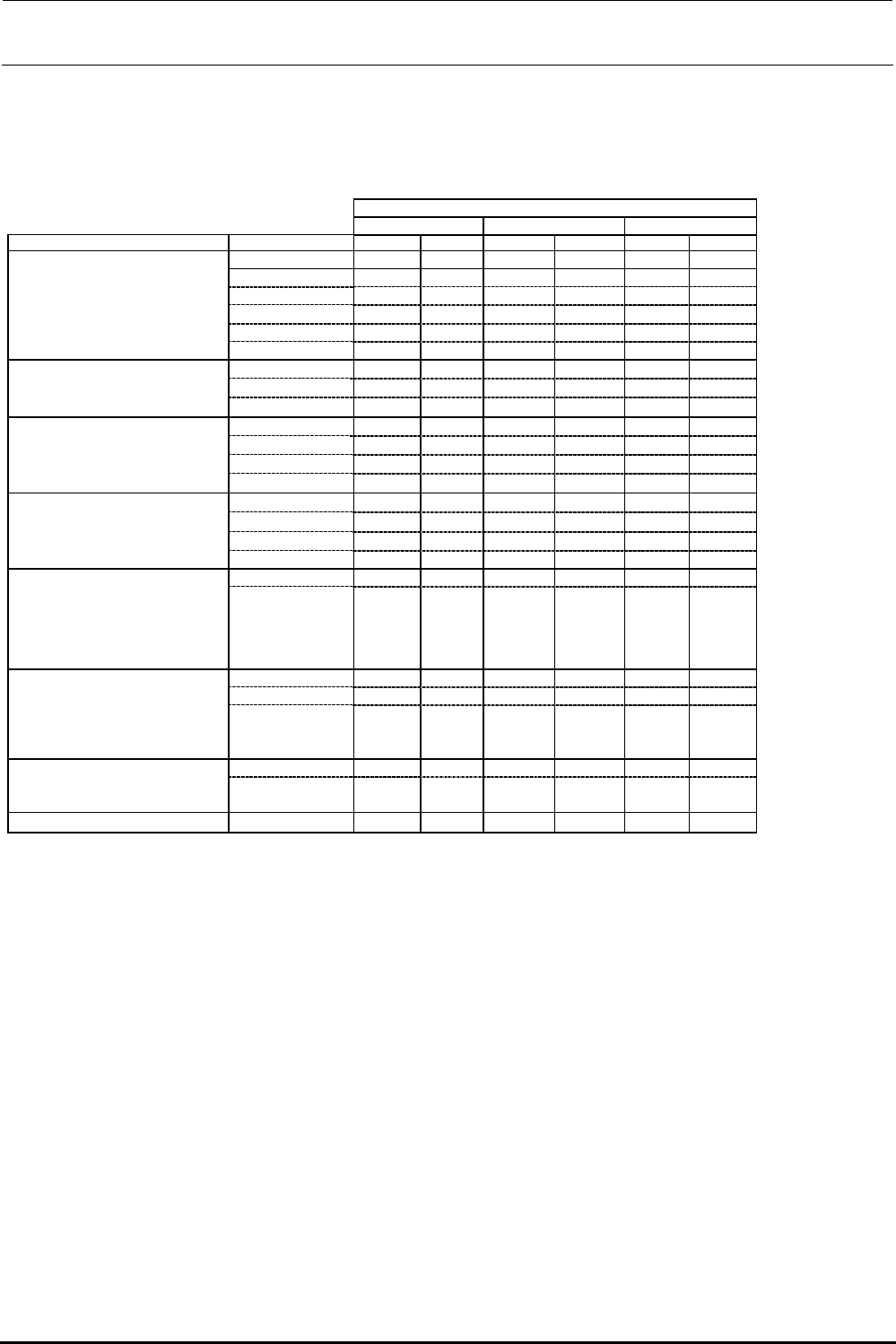
3-6.Zθ轴动作
3-6-1.Z 轴的速度区分
Z 轴、θ 轴的速度区分
Z轴、θ轴的速度区分
吸附时的Z轴 贴装时的Z轴 θ轴
元件种类 最小元件宽度 (W) 下降 上升 下降 上升 测定 测定外 典型的元件
Min≤W<0.45
中速 中速 高速 高速 高速 高速 0603
0.45≤W<0.75
高速 高速 高速 高速 高速 高速 1005
0.75≤W<1.1
高速 高速 高速 高速 高速 高速 1608
1.1≤W<2.5
高速 高速 高速 高速 高速 高速 2012, 3216
2.5≤W<20
高速 (高速) 高速 高速 高速 高速
方芯片
网络阻抗
20≤W<50
高速 低速 高速 高速 高速 低速
0.5≤W<2.5
高速 中速 高速 低速 高速 高速
2.5≤W<20
高速 (中速) 高速 低速 高速 高速
散件
20
≤W<50
高速 低速 高速 低速 高速 低速
0.5≤W<1.1
高速 高速 高速 中速 高速 高速 SSmini
1.1≤W<2.5
高速 高速 高速 中速 高速 高速 Smini, SOT23
2.5≤W<20
高速 (高速) 高速 中速 高速 高速
SOT
20
≤W<50
高速 低速 高速 中速 高速 低速
0.5≤W<3.2
高速 高速 高速 低速 高速 高速
3.2≤W<33.5
高速 (高速) 高速 低速 高速 高速
33.5≤W<50
高速 低速 高速 低速 高速 高速
铝电解电容器
钽电容器
微调电容器
GaAsFET
0.5≤W<50
高速 (高速) 中速 中速 低速 (中速)
PLCC
SOJ
J引脚插座
翅式插座
减震插座
SOP
0.5≤W<5
高速 高速 中速 低速 中速 中速
TSOP
5≤W<50
高速 (高速) 中速 低速 低速 (中速)
HSOP
单向引脚插头
双向引脚插头
QFP
0.5≤W<50
高速2 高速2 中速 中速 低速 中速
BGA
BQFP
其他
0.5
≤W<50
高速 (高速) 高速 高速 高速 (高速)
注1) 吸附时的 Z 轴上升速度,元件尺寸超过 8×8mm 的元件无条件地变换为低速。
注2) 测定外的 θ 速度,元件尺寸超过 20×20mm 的元件无条件地变换为低速。
注3) 贴装时的 Z 轴上升速度,元件高度超过 4.7mm 以上的元件无条件地变换为低速。
注4) 防护罩开放速度在 θ 轴不设定,仅 Z 轴设定。但是 Z 轴移动中,防护罩开放速度不变换。另外,吸附下降、
吸附上升、贴装上升、贴装下降为中速和低速 2 级控制,防护罩开放速度同样为高速 1 级控制。
注5) 上述的高速,使用其他机种编制的贴装程序时为高速,新编制贴装程序货变换其他机种的贴装程序时为高速
2。
Rev1.0
动作说明书
3-21
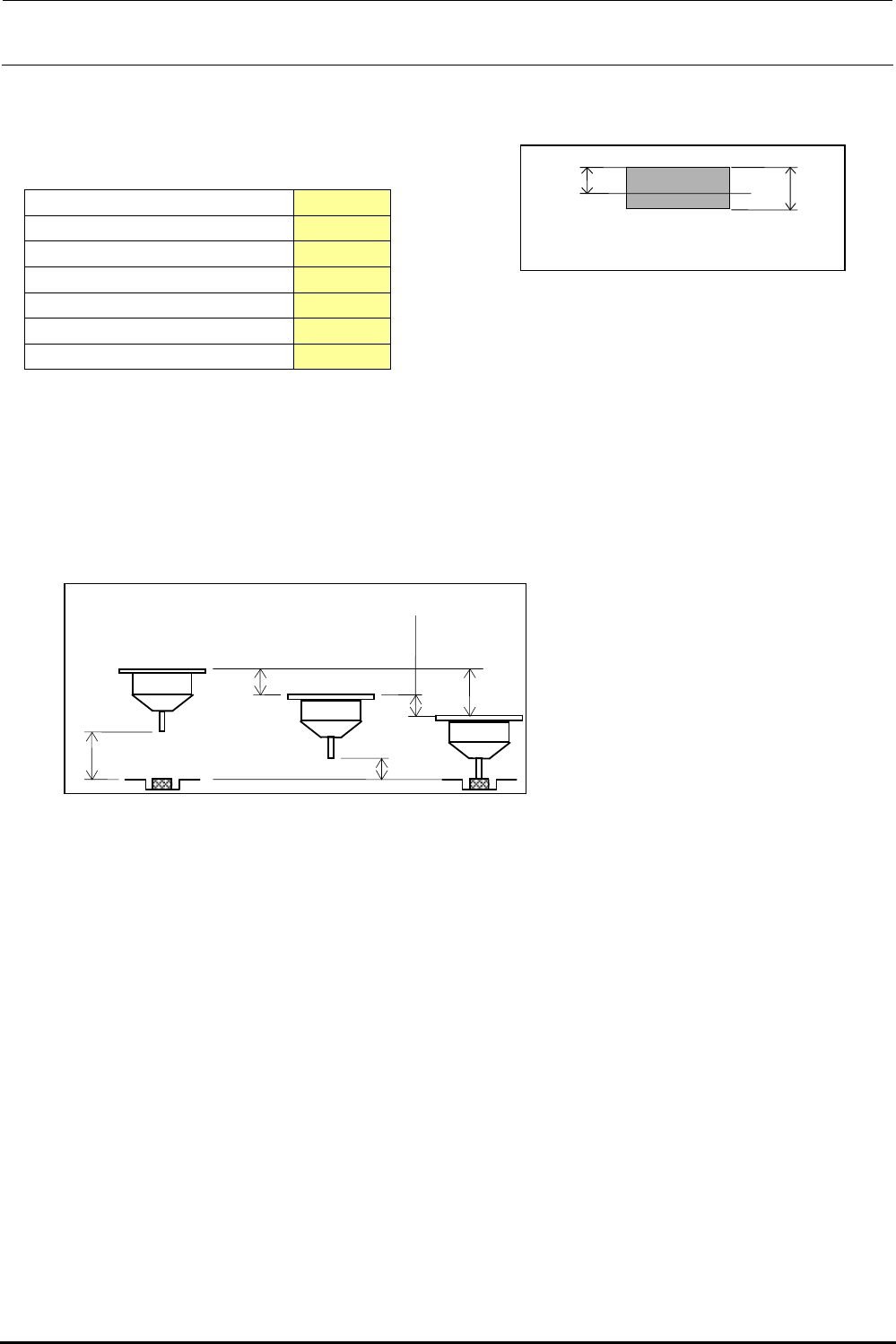
3-6-2.Z 轴的动作行程
Z轴驱动行程计算条件 (单位: mm)
XY 移动高度 α 9
激光高度 β 20.5
元件厚度 h = 0.8
激光测定高度 t = 0.4
吸附压入量 0.2
贴装压入量 0.5
2 段控制高度 2.0
(注 1)吸附压入量和贴装压入量上述取消时的元件数据可以变更。
(注 2)吸附下降·吸附上升·贴装下降·贴装上升个别元件数据可以分高速·中速·低速进行设定。
(注 3)吸附下降·吸附上升·贴装下降·贴装上升、分中速、低速 2 阶段设定。
(注 4)2 阶段控制高速作为上述取消时可以在机械控制参数变更。
(注 5)高度为距离基板上面的距离。
3-6-2-1 吸附下降时的 Z 轴动作(行程区分 A)
A=XY 移动高度(9mm) + 吸附压入量(0.2mm)=9.2mm
A1=XY 移动高度(9mm) − 2 段控制高度(2mm)=7mm
A2=2 段控制高度(2mm) + 吸附压入量(0.2mm)=2.2mm
t
h
h: 元件厚度
t: 激光测定高度
α
A1
A2
A
2
XY 移动高度
吸附高度