FX-2_动作说明书.pdf - 第26页
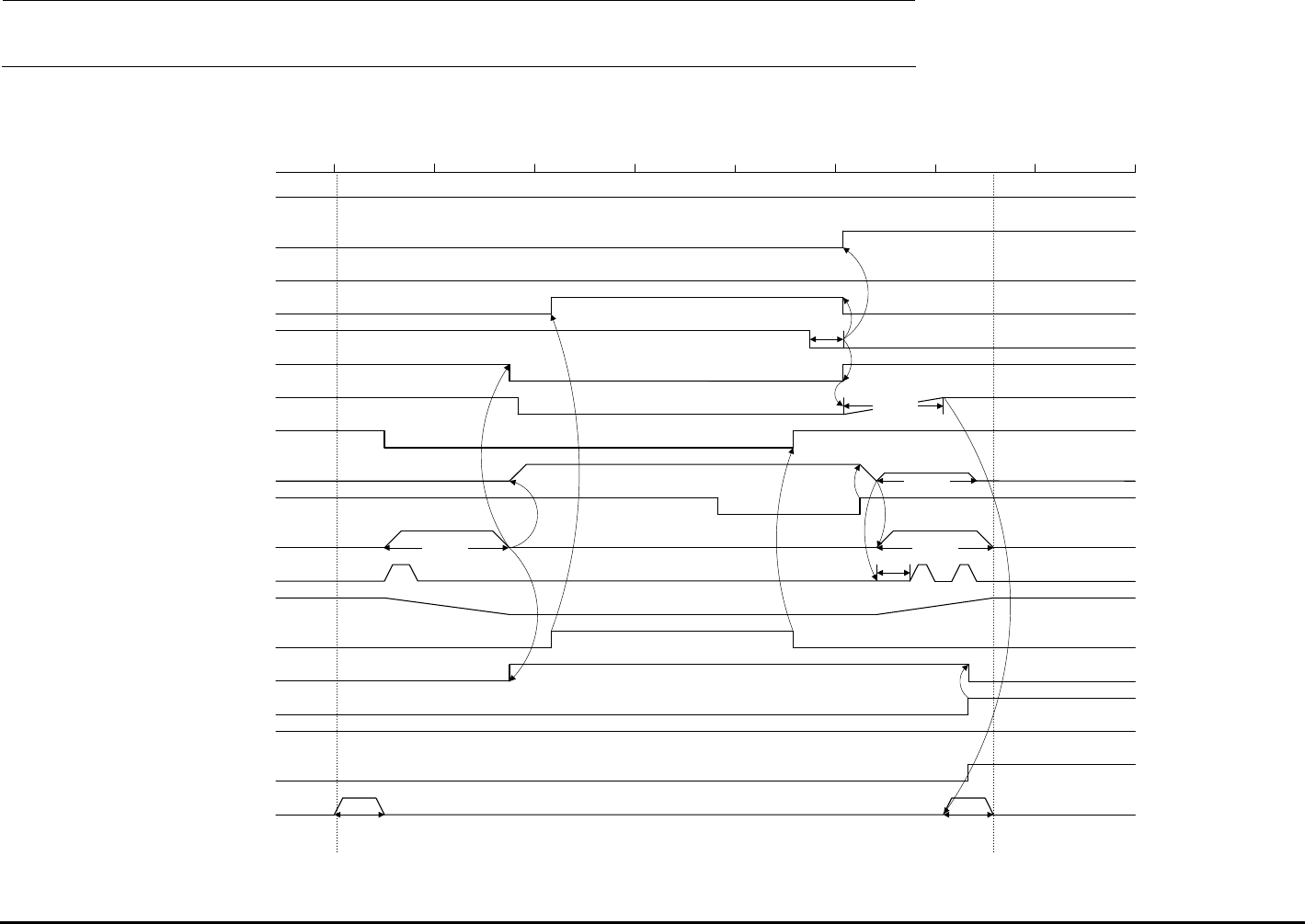
Rev1.0 动作说明书 3-13 3-3-3 .基板传送时间曲线图 Board Available in signal Ready Out Signal IN Sensor IN Motor Wait Sensor Check Cylinder Check Cylinder Sensor Center Stopper Center Motor Stop Sensor Support Table Motor Y Clamp Motor …
Rev1.0
动作说明书
3-12
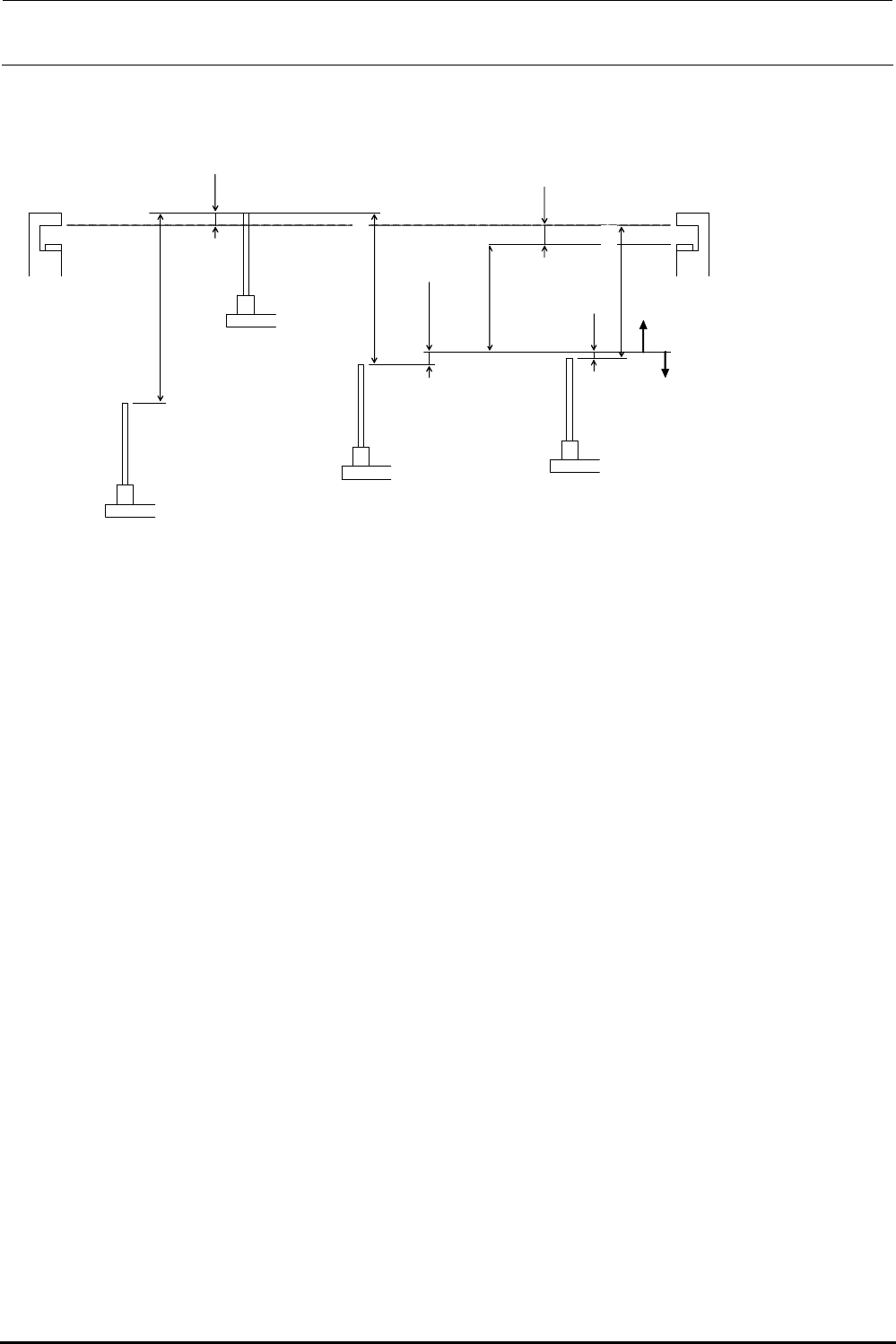
3-3-2.支撑台
支撑台、机械行程以及有效行程
基板上面高さ
0.5mm
5mm
有効ストローク 52.5mm
MS パラメータ入力
2 mm
7mm
40mm( 最大 )
最大基板下制限
メカストローク 59mm
④原点高さ位置
B(原点センサ ON 方向)
A(原点センサ OFF 方向)
エンコーダ零相検出
③ソフト下方向リミット位置
①メカ下方向リミット位置
②メカ上方向リミット位置
基板上面高度
机械上方向限制位置
机械下方向限制位置
软件下方向限制位置
变换器零相检测
原点高度位置
B(原点传感器ON方向)
A(原点传感器O FF方向)
机械行程5 9mm
有效行程5 2.5 mm
输入M S参数
最大 基 板 下限 制
(最大)
①:下方向的机械界限高度
②:上方向的机械界限高度
③:是有效行程下限位置,基板送入、排出时的待机位置。
有效行程上限位置是从③的高度上升 52.5mm 的位置,与②高度相同。
有效行程∶生产中可以驱动的行程范围
(注)基板下限制可以在从 5mm 起 40mm 的范围,以1 mm 单位进行设定。
默认的基板下限制为 40 mm。
(注)③的有效行程下限高度,根据基板下限而变化。
因此,有效行程也按下式变化。
有效行程(mm) =基板下限(mm)+5+7+0.5
基板送入·送出时的待机高度也同样变化。
以有效行程上限为基准高度
待机高度(mm)=基板下限(mm)+5+7
Rev1.0
动作说明书
3-13
3-3-3.基板传送时间曲线图
Board Available in signal
Ready Out Signal
IN Sensor
IN Motor
Wait Sensor
Check Cylinder
Check Cylinder Sensor
Center Stopper
Center Motor
Stop Sensor
Support Table Motor
Y Clamp Motor
Support Table Encoder
C Out Sensor
Out Motor
Out Sensor
Ready In Signal
Board Available out signal
Y table
250
msec
250
msec
600msec
200
msec
600msec
500msec
500msec
200
msec
500 1000 1500 2000 2500 3000 3500 40000msec
←Production →Production
Rev1.0
动作说明书
3-14
3-3-4.传送异常错误
异常种类 内容
IN 缓冲异常 1) IN 马达 ON 后,IN 传感器 3 秒以上 ON。
2)IN 马达转动时,IN 传感器和 WAIT 传感器同时变为 ON。
3) IN 传感器 ON,从 IN 马达开始转动起 6 秒钟之后,WAIT 传感器也不 ON。
(有关时间,由机械控制参数决定)
4) 从 IN 缓冲向入口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
入口侧中心站异常 1) 入口侧中心马达连续转动 6 秒钟以上。
2) 入口侧 C・OUT 传感器 ON,入口侧 STOP 传感器 OFF->ON。
3) 从入口侧中心站向出口侧中心站过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
OUT 缓冲异常 1) OUT 马达连续 6 秒钟以上连续转动。
2) 出口侧 C・OUT 传感器和 OUT 传感器通知变为 ON。
3) 从 ReadyIN(ON)信号检测向后续工程过度经 6 秒之后也不结束。
(有关时间,由机械控制参数决定)
后备异常 1) 后备马达上升结束时,T・PIN 传感器 ON(孔基准时)。
检测气缸错误 1) 使传送装置的机械位置初始化时,IN 检测气缸虽开始上升,但不在 2 秒钟之
内结束上升。
(关于时间,由机械控制参数决定)
2) 基板通过 IN 缓冲区后,IN 检验气缸虽开始上升,但不在 2 秒钟之内结束上
升。
(关于时间,由机械控制参数决定)
PWB 检测传感器错误 1) 使传送装置的机械位置初始化时,PWB 检测传感器为 ON。
2) 传送装置动作前进行传送通路上的基板有无检测时,PWB 检测传感器为
ON。
3) 基板向中央缓冲区传送结束(STOP 传感器 ON)的时间点上,PWB 检测传
感器为 ON。
4) 在基板夹紧结束的时间点上,PWB 检测传感器为 ON。
5) 重夹过程中,基板向夹紧动作开始位置移动结束(STOP 传感器 ON)的时
间点上,PWB 检测传感器为 ON。
其他 1) 中心马达动作异常(由 XMP 决定)
2) 后备马达动作异常(由 XMP 决定)