FX-2_动作说明书.pdf - 第97页
Rev1.0 动作说明书 5-21 ② YB 轴 エンコ ーダ 入力 I/Fユ ニット モー タ駆動電流 U、V、W 相 スケールヘッド ステージ ベルト マグネス ケール リニアエンコーダ信号 (マグネ スケー ル) ロータリーエン コーダ信号 サーボモータ 位置制御 信号 位置フィード バック信号 ポジション ボード YB軸 ドライバ SSCNET Ⅱ 位置接口板 位置控制 信号 YB轴 驱 动 器 位置供料 反馈信号 线性变换器信…
Rev1.0
动作说明书
5-20
5-2.马达的控制方式
5-2-1.XY 轴的控制方式
对 X、YB 轴采用全闭环方式的控制,对 YA 轴采用半闭环方式。
下图为各轴方式的方块图。
① X 轴
エンコーダ入力
I/Fユニット
モータ駆動電流
U、V、W 相
リニアモータ
スケールヘッド
可動子
リニアモータ
固定子
マグネスケール
信号
位置フィード
バック信号
リニアエンコーダ信号
(マグネスケール)
ポジションボード YB軸 ドライバ
SSCNETⅡ
位置制御
位置接口板
位置控制
信号
YB轴驱动器
线性变换器信号
(磁标尺)
马达驱动电流
线性马达
转子
线性马达
定子
标尺头
磁标尺
位置供料
反馈信号
变换器输入
I/F装置
图5-2-1
X 轴的全交叉减弱方式
Rev1.0
动作说明书
5-21
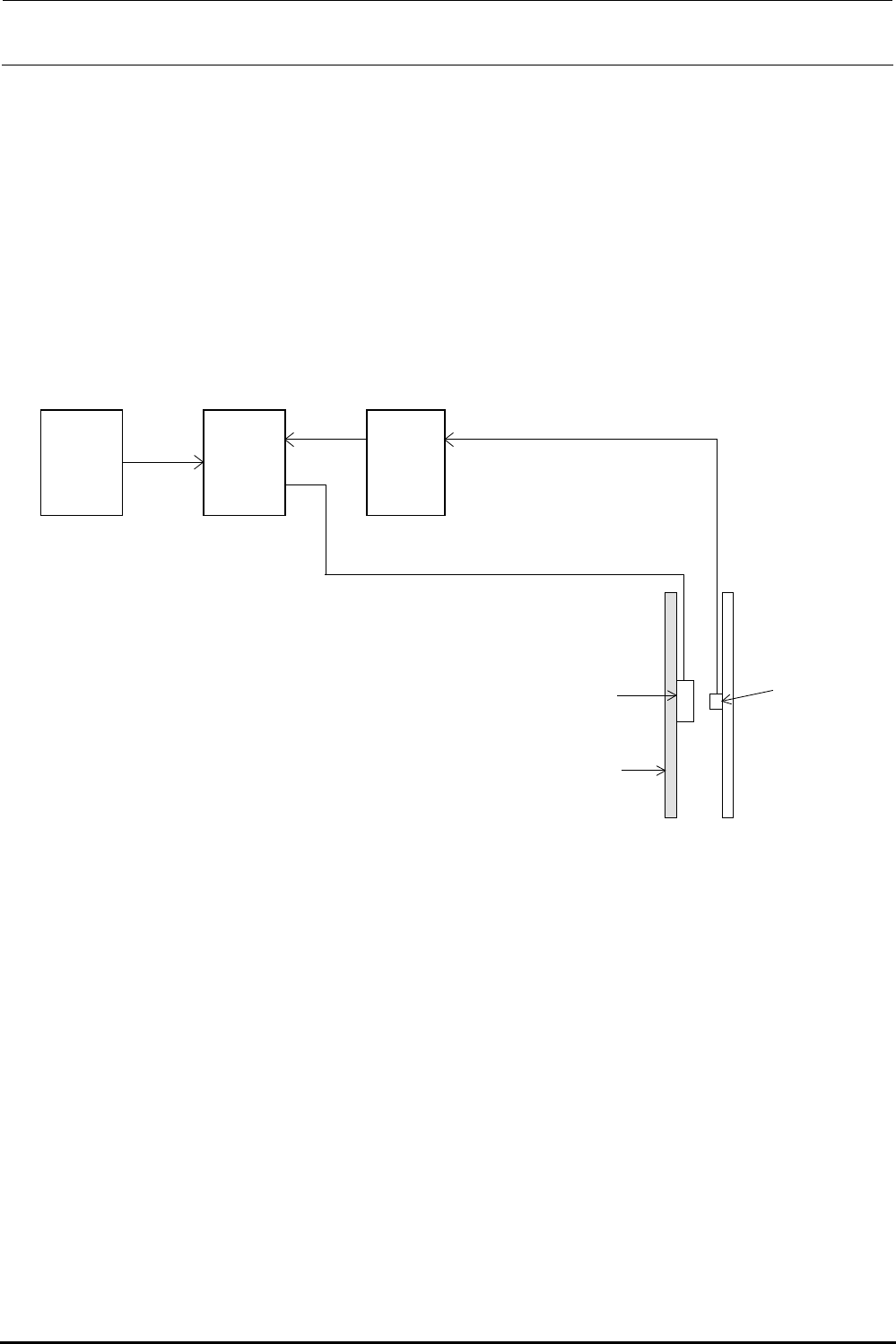
② YB 轴
エンコーダ入力
I/Fユニット
モータ駆動電流
U、V、W 相
スケールヘッド
ステージ
ベルト マグネスケール
リニアエンコーダ信号
(マグネスケール)
ロータリーエンコーダ信号
サーボモータ
位置制御
信号
位置フィード
バック信号
ポジションボード YB軸 ドライバ
SSCNETⅡ
位置接口板
位置控制
信号
YB轴驱动器
位置供料
反馈信号
线性变换器信号
(磁标尺)
旋转变换器信号
伺服马达
变换器输入
I/F装置
马达驱动电流
台
标尺头
皮带
磁标尺
图5-2-2
YB 轴全交叉减弱方式
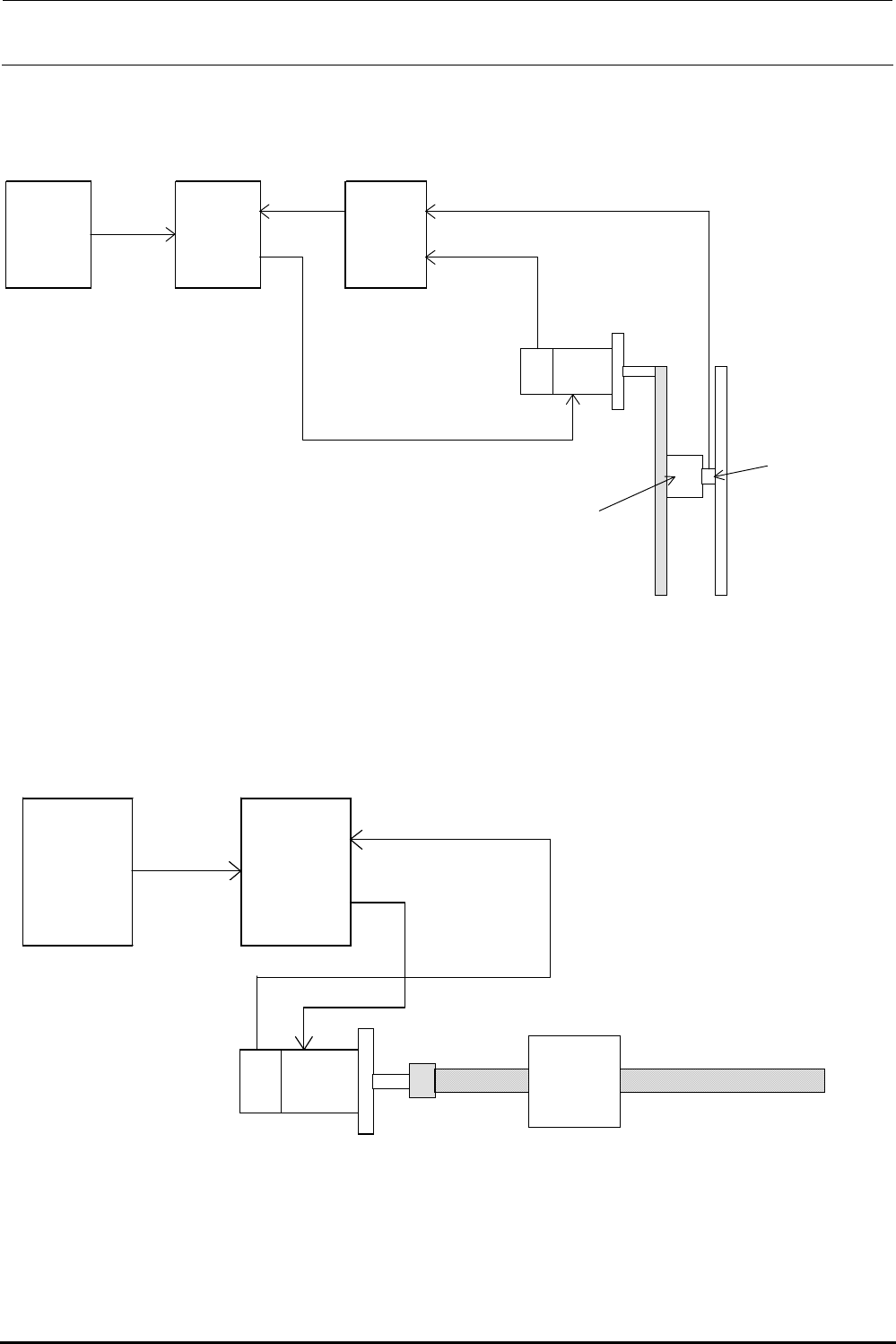
③ YA 轴
モータ駆動電流
U、V、W 相
ボールネ
ジ
ポジションボード YA軸 ドライバ
SSCNETⅡ
位置制御
ロータリーエンコーダ信号
ステージサーボモータ
信号
位置接口板
位置控制
信号
YA轴驱动器
伺服马达
旋转变换器信号
马达驱动电流
台
球螺丝
图5-2-3
YA 轴的半交叉减弱方式
Rev1.0
动作说明书
5-22
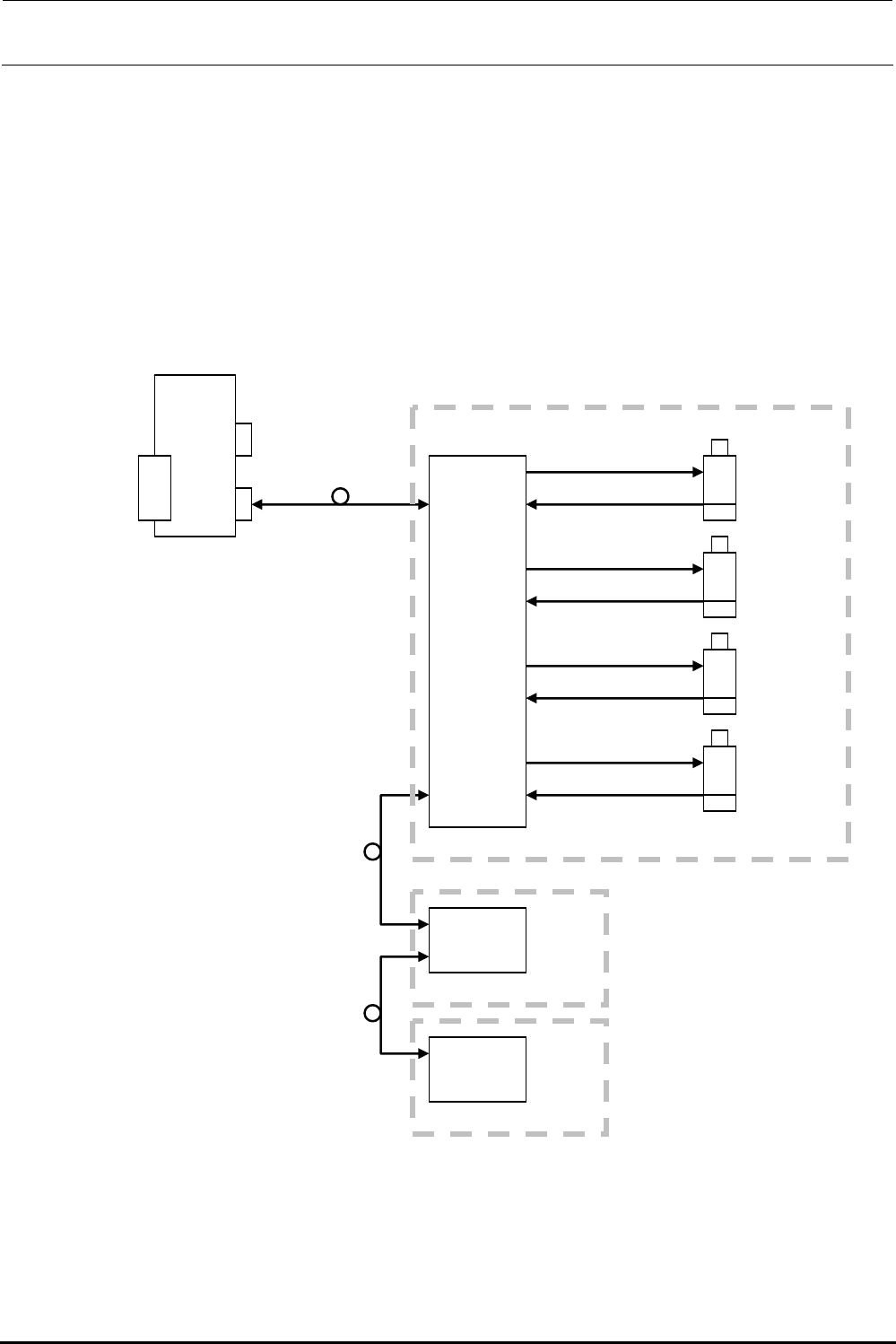
5-2-2.Z,θ 轴的控制方式
Z、θ轴的电动机控制采用半闭环控制方式,在 Z 轴是进行元件的贴装及吸取等上下动作,在 θ 轴是进行元
件激光识别及角度校正等旋转动作。
Z
轴及θ轴的控制组成图如下所示。
LNC
贴装头用 Zθ轴
图5-2-4
LNC 贴装头用 Zθ轴 方块图
位置 控制板
CPCI
接口
SSCNETⅢ
光通信
SSCNETⅢ
光通信
SSCNETⅢ
光通信
4 轴 1 体
放大器
MR-MD100
UVW 相 出
编码器输出
(三菱串行)
θ 机
Z
机
*A
4 轴 1 体
放大器
*A
4 轴 1 体
放大器
*A
UVW 相 出
编码器输出
(三菱串行)
θ 机
Z
机
UVW 相 出
编码器输出
(三菱串行)
UVW 相 出
编码器输出
(三菱串行)