QP-242E 工程师培训手册 (6.0).pdf.pdf - 第113页
FK-9F98-07 QP242E Training Text for Service Engineers 6th edition 13. MTU 71E Adjustment [ 11 /24] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Section No.2 13- 11 [ 1 …
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 13. MTU 71E Adjustment [10/24]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
13-10
[
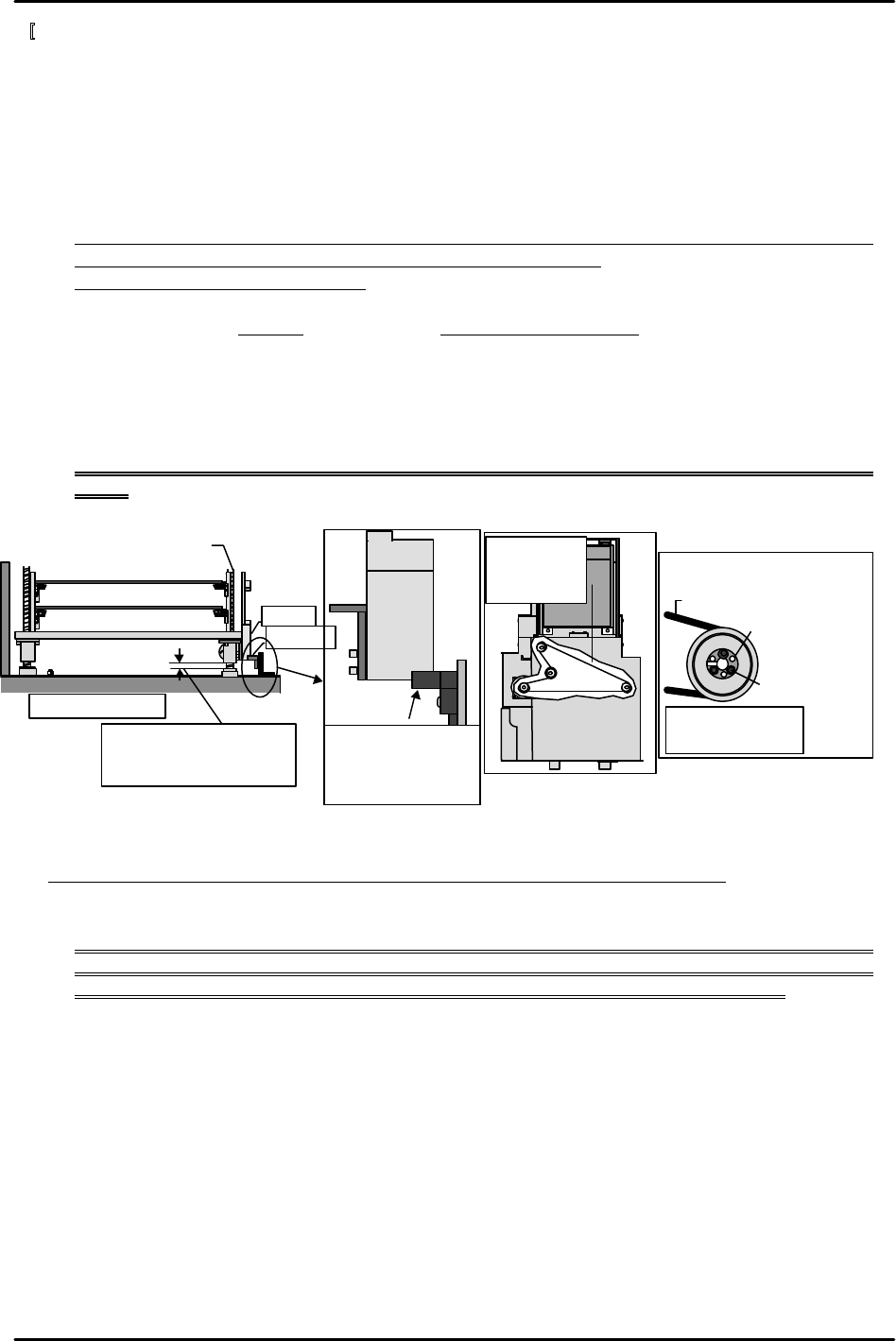
13-27] TZ-axis Zero Set Position Adjustment
1) Rotate the ball screw by hand and move the two spline shaft nuts to the mechanical stopper
positions.
2) Loosen the span ring on the belt pulley mechanism located on the underside of the ball
screw. If the spann ring is difficult to loosen, move the bolt to the adjacent loosening hole as
shown in the figure and fasten the bolt in the hole.
3) Use the inching button to move the TZ-axis –1,000 pulses (–10 mm). In this position wrap
the belt around the pulley, tighten the spann ring and use the belt tension pulley to adjust
the tension.
Note: In some instances the pulley may drop down as the ring is tightened. Push the pulley
up to the highest point and then tighten the spann ring bolt.
Belt tension: 52.10 Hz ~ 62.10 Hz
4) Install the zero set dog (also serves as TZ-axis interlock) that was removed in an earlier
process. Move the TZ-axis via inching to a servo count of + 400 (position 14 mm from the
mechanical stopper). Move the zero set sensor to adjust it so that it comes on at this position.
5) Next, move the TZ-axis to turn the sensor off and then back on to verify the servo count value.
6) Lastly install the TY-axis interlock (also serves as set pitch) dog. Raise the TZ-axis via
inching and adjust the bracket position so that none of the interlock sensors and dogs
interfere with each other.
Note: If the TZ-axis interlock dog is moved the TZ-axis zero set sensor must be adjusted
again.
[13-28] Zero_Offset_TZ Measurement and Re-calibrating Zero Setting
Move the TZ-axis up 1 mm (100 pulses) from the bottom mechanical stopper. The servo count
value at this time becomes the Zero_Offset_TZ value. After the value is entered at the machine or
transmitted from F4G, cut the power to the machine, reboot and then carry out zero set again.
Note: After zero set is completed the machine moves not to the zero set complete position but to
the position specified by Zero_Offset_TZ and the servo count value is reset to zero. Before
proceeding to the next item be sure to cut the power and carry out zero set again.
Adjust so that the
zero set sensor comes
on when the TZ-axis
count is + 400 pulses.
Timing belt
Ring lock
bolt
Bolt loosening
hole
View from bottom of the ring
Belt tension
measureme
nt location
Bolt tightening
torque is 2 kgf.cm
TZ-axis ball screw
MTU bottom front
10mm
Counter value is 0 (zero
set complete position)
Dog
゙
Sensor
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 13. MTU 71E Adjustment [11/24]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
13-11
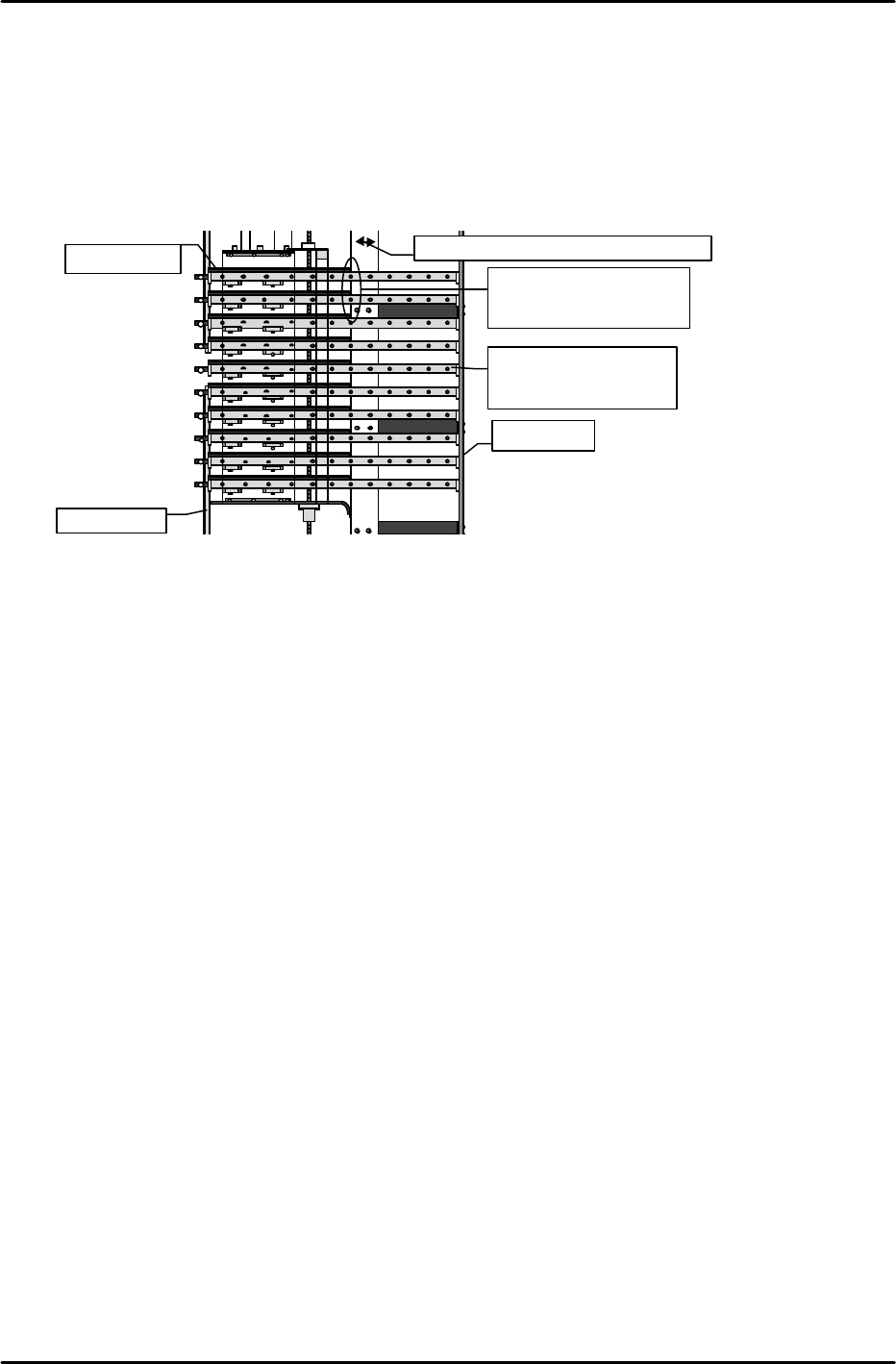
[13-29] Tray Holder Positioning Adjustment
1) When the tray holder pops out of the MTU, press the tray holder into the MTU by hand.
While checking that the tray holder does not interfere with any of the components such as
the rollers, move the fifth level tray holder to the center of the MTU by inching the TZ-axis.
2) Open the safety door and push all of the tray holders to the guide rail in the back of the unit.
Use a long scale on the portion of the tray holder that makes contact with the white plastic
guide attached to the door in order to verify which tray is entered the farthest back in the unit.
At this time verify that the deviation between all of the tray positions is not more than 1 mm.
3) Loosen the mounting bolts of the white plastic guide attached to the door.
4) Close the door and adjust the gap between the tray holder and guide that was verified
in step 2, within a range between 0.5 mm and 1 mm. Then secure the mounting bolts.
5) Move the TZ-axis up and down and verify that the gap between the tray holder and guide
lies within the range used in adjustment (0.5 mm ~ 1mm) at any position.
[13-30] Re-calibrating Zero Setting Prior to Proper Data Measurement.
[13-31] Remover_Position_X,Y,Z
1) Attach the measurement jig to the remover station, and then turn I/O Y000: REMOVER UP
on to raise the remover station.
2) Press EMERGENCY STOP and move the head placement hook mechanism by hand to the
station position.
3) Raise the Z-axis by hand and fine adjust the XY axes so that the pin on the placement hook
mechanism fits smoothly into the hole in the jig. This position becomes Remover_Position_X
and Y.
4) Lower the Z-axis from the Remover_Position_X and Y position to press the placement hook
pin into the jig hole. Lower the Z-axis further until the chuck-positioning pin is depressed 1
mm (spring return of 1mm). This position is the Remover_Position_Z value.
[13-32] Remover Lubrication
Apply grease (Daphne Eponex #2) to the placement hook mechanism pin and plate spring
such that the grease does not splatter.
Guide rail
Move the white plastic guide to adjust.
Tray holder
Guide rail
Move the fifth level
tray so that it comes to
the center of the MTU.
Adjust the gap between
the tray holder and the
plastic guide to 0.5 mm.
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 13. MTU 71E Adjustment [12/24]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
13-12
[13-33] Prior to Connecting the MTU71E
- Cable connections should be made with the power turned off.
- Connect the MTU7 unit to the machine in the zero set complete status with a magazine in the
standby status, with the TZ-axis moved to 0 pulses via inching and with the TY-axis in the
standby status at the forward limit.
- Once the unit is joined to the machine do not turn off the power until measurement of
Original_Position_TY is completed. If after the unit is connected to the machine the power
is cut and zero set is performed again there is a danger of damage resulting from contact
between the shuttle jaw and the tray holder.
Note: When MTU detachment is carried out over the course of installation or adjustment
work, always be sure that the TZ-axis position is lowered to 0 pulses beforehand using
magazine standby or the inching operation.
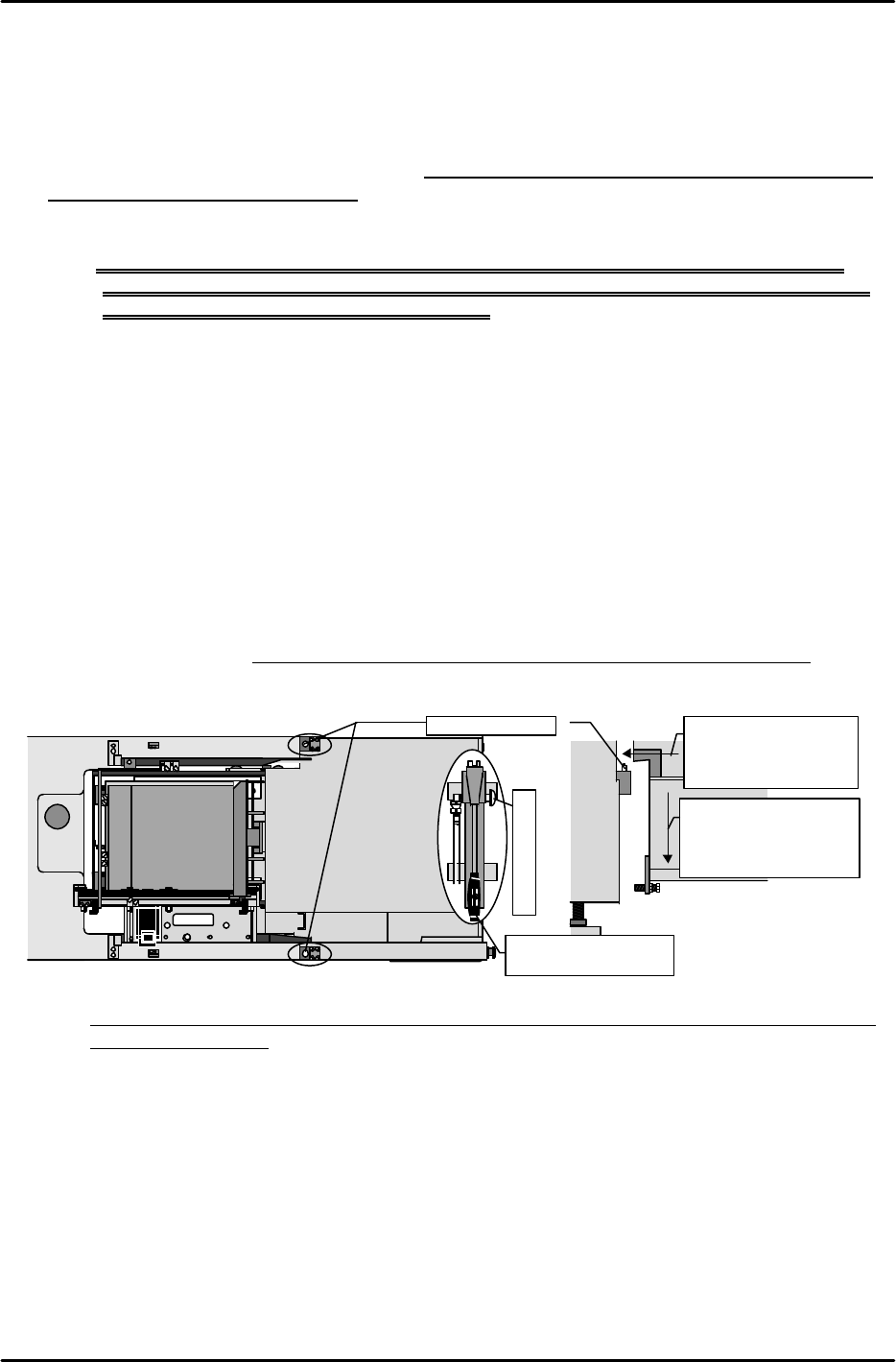
[13-34] MTU71E Connection
1) Use the hydraulic jack on the bottom of the safety door to raise the machine to a height at
which the lower surface of the positioning blocks on the inside of the MTU71E do not make
contact with the tips of the positioning pins on the machine.
2) Carefully move the MTU71E to the machine connection position checking that there is no
interference with the connecting cables or other parts of the unit and then align the
positioning blocks on the inside of the MTU71E with the positioning pins on the machine
side.
3) After this is completed, loosen the hydraulic jack valve to slowly lower the machine and
connect.
4) Verify that there is no gap between the top and bottom blocks and the contact surface and
check that the unit fits perfectly.
(Use a feeler gauge to confirm that the gap is within 0.03 mm.)
Note: If the bolt for adjusting the angle of orientation is loosened by mistake, adjustment must
be performed again.
MTU7
Loosen the air jack to
lower the machine
and connect the MTU
to the machine.
Loosen to lower
M/C
Leveling bolt
Raise the machine to
a height where there
is no interference
with the pins.
M/C
Positioning pins
Move the lever up
and down to raise.
Hydraulic jack