QP-242E 工程师培训手册 (6.0).pdf.pdf - 第77页
FK-9F98-07 QP242E Training Text for Service Engineers 6th edition 8. MTU6 Adjustment [ 9 /16] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Section No.2 8- 9 [8 -1 8 ] P…
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 8. MTU6 Adjustment [8/16]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
8-8
[8-16] Zero_Offset_TZ & Original_Position_TZ Input
1) Zero_Offset_TZ
The servo count value corresponding to the position 1,000 pulses below the value for
Original_Position_TZ that was provisionally measured in the previous section becomes the
Zero_Offset_TZ value. Use the following command operation to input the Zero_Offset_TZ value
on the machine; [PROPER], [ETC], [ETC], [Zero Offset],
[ETC], [TZ], [SET], input the value using the numeric key pad and then hit return.
2) Original_Position_TZ
Move the TZ-axis via inching to a servo pulse count of 1,000 (view the servo count value on the
operation display while inching the axis). Use the following command operation to input
Original_Position_TZ: 1,000 at the machine; [PROPER], [DEVICE],
[ORG. POS. Z], [ORG. POS. TZ], and [SET].
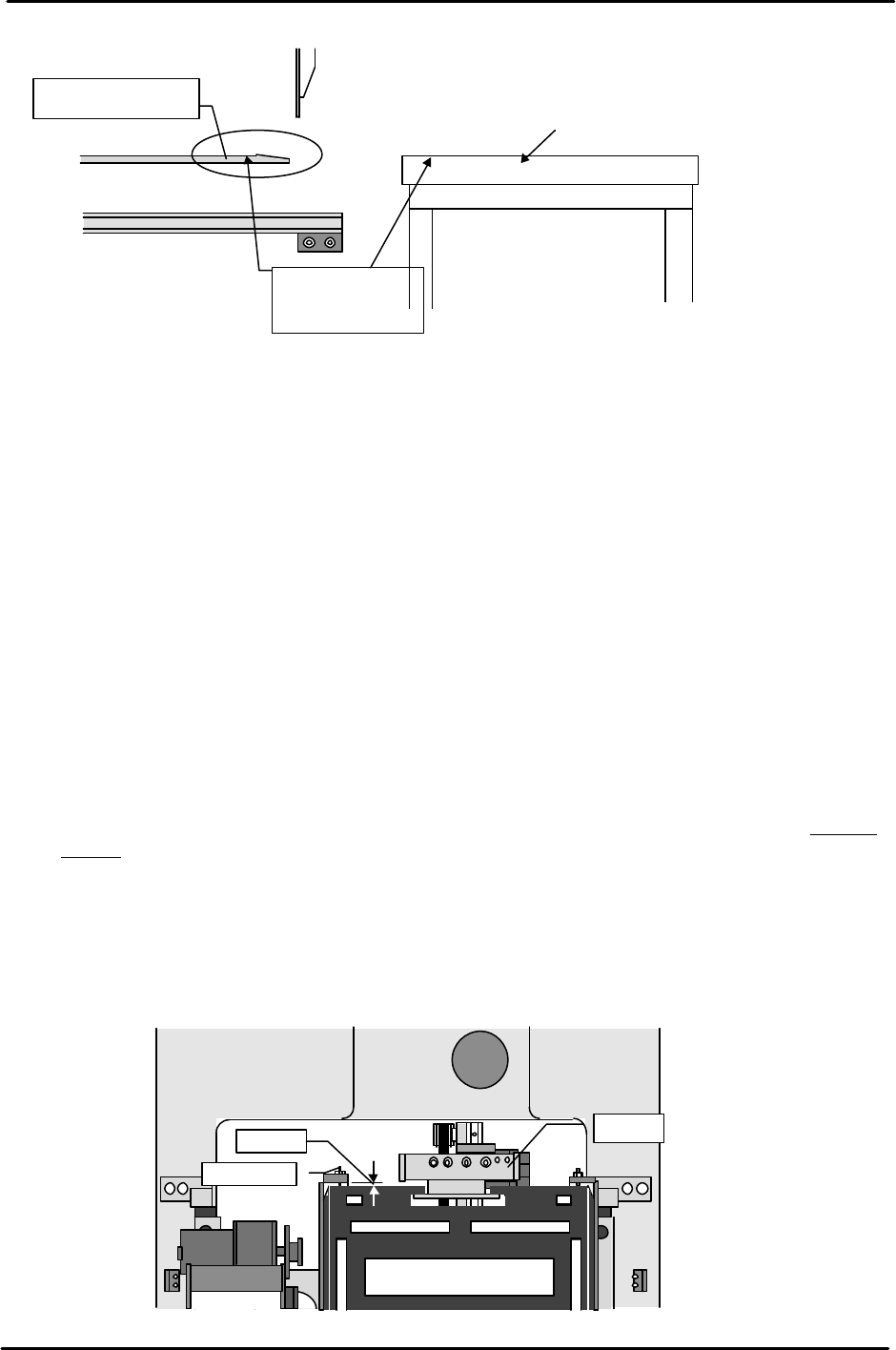
[8-17] Slope Adjustment & Zero_Offset_TY Measurement
1) Loosen the set screws on both ends of the slope and then tighten the bolts so that they do not
interfere with the receiving plate.
2) Once this is completed use the following command operation to move the shuttle to the advance
limit; [POSITION], [MTU], [SHUTTLE], [ADVANCE], and press START. The tray holder will
also move forward with the shuttle.
3) Move the tray holder via inching so that the end of the tray holder comes to a position 2mm in
front of the left side (device position 101) slope frame end.
4) Once this is done push in on the set screws on both ends so that they make slight but even contact
with the tray holder. From this position of contact, turn the set screws another half turn and
secure in place in that position.
5) This is the Zero_Offset_TY position.
Input the value at the machine using the same input procedure as described in the previous
section.
Shuttle tray
Machine side
Lower to a position
0.5 mm below the
uniform level.
Original_Position_TZ
measurement jig
Tray holder
shuttle
2mm
Set screw
Device #101
Device # 102
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 8. MTU6 Adjustment [9/16]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
8-9
[8-18]
Perform Zero Set Again
After the Proper data items Zero_Offset_TZ and TY are input perform zero set again.
Note: Normally after zero set is completed the TZ and TY axes move by the amount of
Zero_Offset. Once this movement is finished, reset the servo count value of that position to
zero. If the Proper data is not input and zero set is not carried out again, the TZ and TY
axes Proper data items that are measured next will change.
Always input the Proper data and carry out zero set again before proceeding.
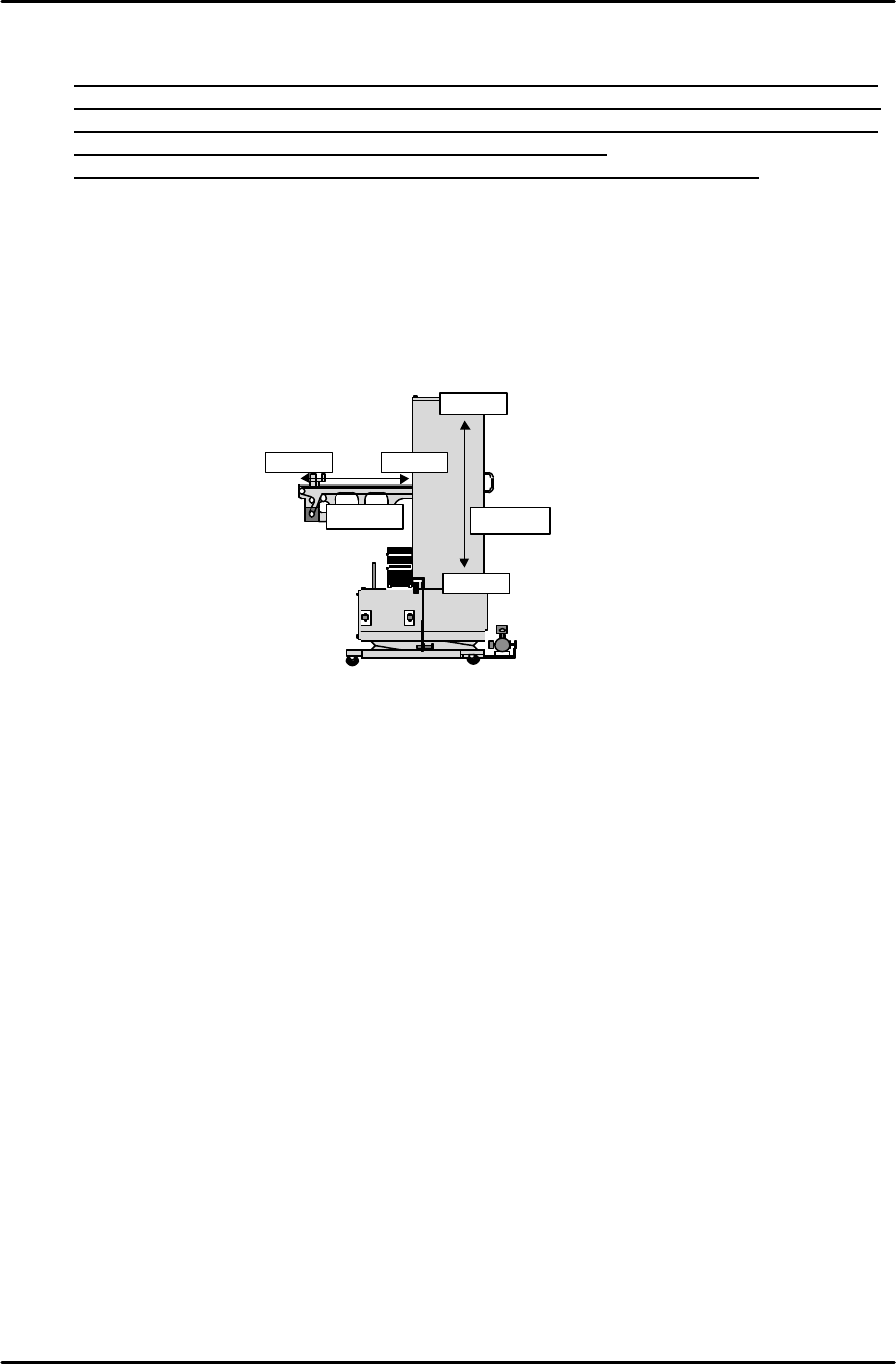
[8-19]
Max,Min Limit Position
Select [PROPER], [Max/Min], and [TY] [TZ] and then carry out [Max Limit] and
[Min Limit] measurement of each axis. For the shuttle, the camera side mechanical stopper
position is the [Min Limit] and the MTU side mechanical stopper position is the [Max Limit].
For the MTU the bottom mechanical stopper position is the [Min Limit] and the top
mechanical stopper position is the[Max Limit]. In the position where the axis is pressed up
against the stopper, press [SET] and the counter value will be automatically entered.
Max Limit
Min Limit
TY-axis
TZ-axis
Min Limit
Max Limit
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 8. MTU6 Adjustment [10/16]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
8-10
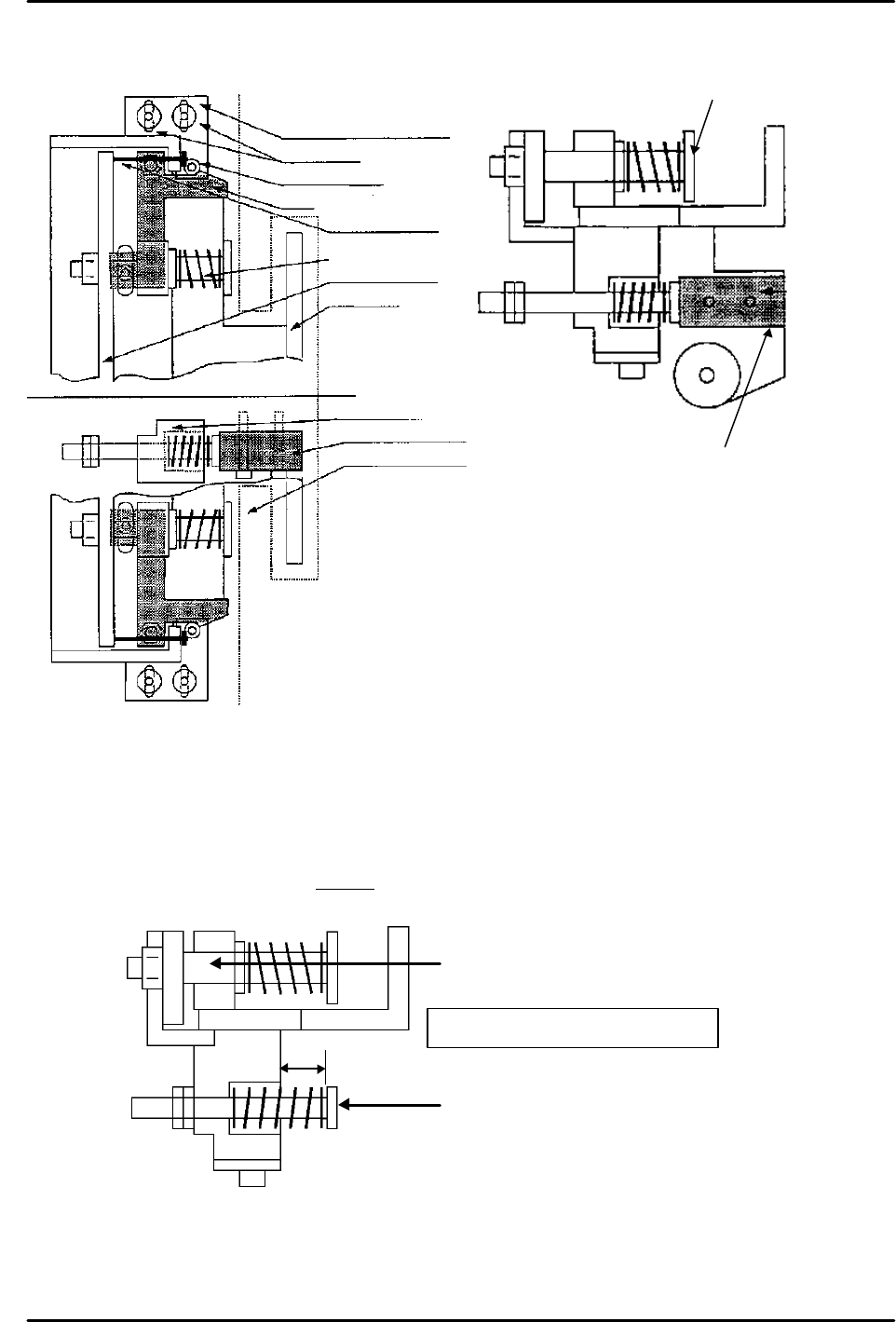
Top view
side view
Clamper shaft
Urethane
stopper
[8-20 ] Shuttle Jaw Adjustment
The following two figures show the shuttle at the retract limit as viewed from the top and the
side respectively. Use these figures as a reference.
1) Original_Position_TY measurement & shuttle tray holder clamper adjustment
a) Zero set the machine.
b) Remove the cam follower bracket. Move the stopper bolt to a position where the end of the
bolt will not hit the shuttle plate even if the shuttle moves to the retract limit. (If it is
screwed in as far as possible there will be no interference.)
c) With the shuttle at the advance limit or any position other than the retract limit (some
intermediate position is okay), change the set position to adjust the retract limit cushion
dimension A so that it is 13 mm as shown in the figure.
Lock bolts
Cam follower
Cam
Stopper bolt
Shaft clamper
Shuttle plate
Shuttle jaw
Retract limit cushion
Urethane stopper
Tray holder guide
Cam follower BKT
A:13mm
Shaft clamper
Retract limit cushion
Retract limit cushion adjustment