QP-242E 工程师培训手册 (6.0).pdf.pdf - 第18页
FK-9F98-07 QP242E Training Text for Service Engineers 6th edition 3. QP242E Initial Adjustment (2) [ 1 /12] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Section No.2 3-…
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 2. Static Accuracy Measurement [2/2]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
2-2
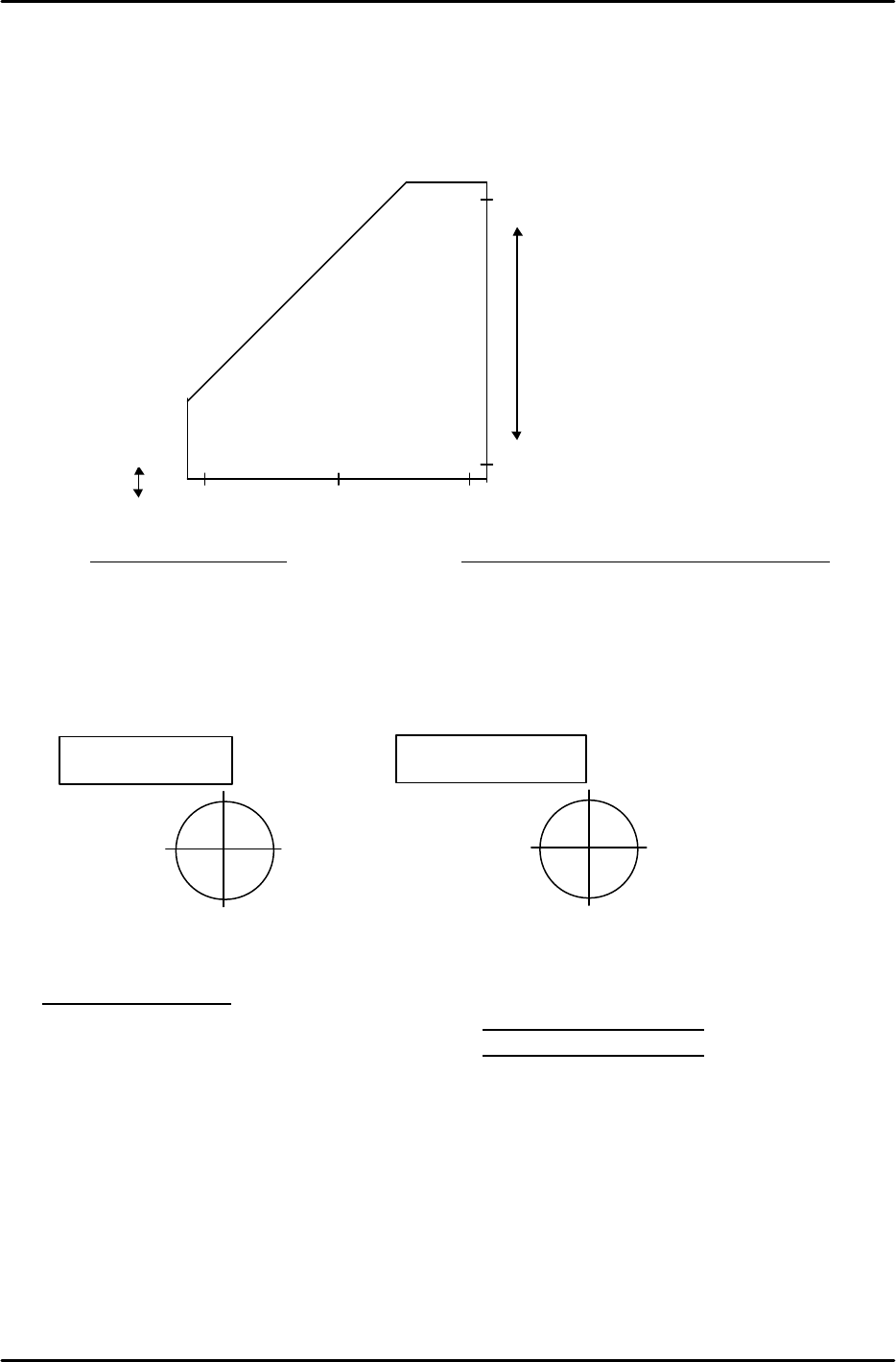
[2-2] X, Y Axes Squareness Measurement
1)Place a right-angled jig on the conveyor and use a dial gauge to position one of the jig's sides so that it is
parallel with the Y-axis.
2)While maintaining this jig position, measure the other side in the X-direction. The amount of X-axis
tilt indicates its straightness relative to the Y-axis.
Tolerance: 0.03 / 400mm Measurement value: / 400 (mm)
[2-3] Z-axis Perpendicularity Measurement
1) Mount a dial gauge on the end of the spline axis, then set a cylindrical jig on the base.
2) With the cylindrical jig's top positioned approximately 5mm below the Z-axis UP limit mechanical
stopper, measure the amount of swing. Next, position the jig's bottom so that it is 30mm lower than
the above position and repeat the swing amount measurement.
Tolerance: 0.03 / 30mm
Difference between jig top/bottom measurements: X (mm)
Y (mm)
Y-direction
( )
Y-direction
( )
X-direction
( )
X-direction
( )
Jig top measurement
Y-direction
( )
Y-direction
( )
X-direction
( )
X-direction
( )
Jig bottom measurement
( ) ( )
0
0
0
400mm
–
+
0
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 3. QP242E Initial Adjustment (2) [1/12]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-1
[Chapter 3] QP242E Initial Adjustments (2)
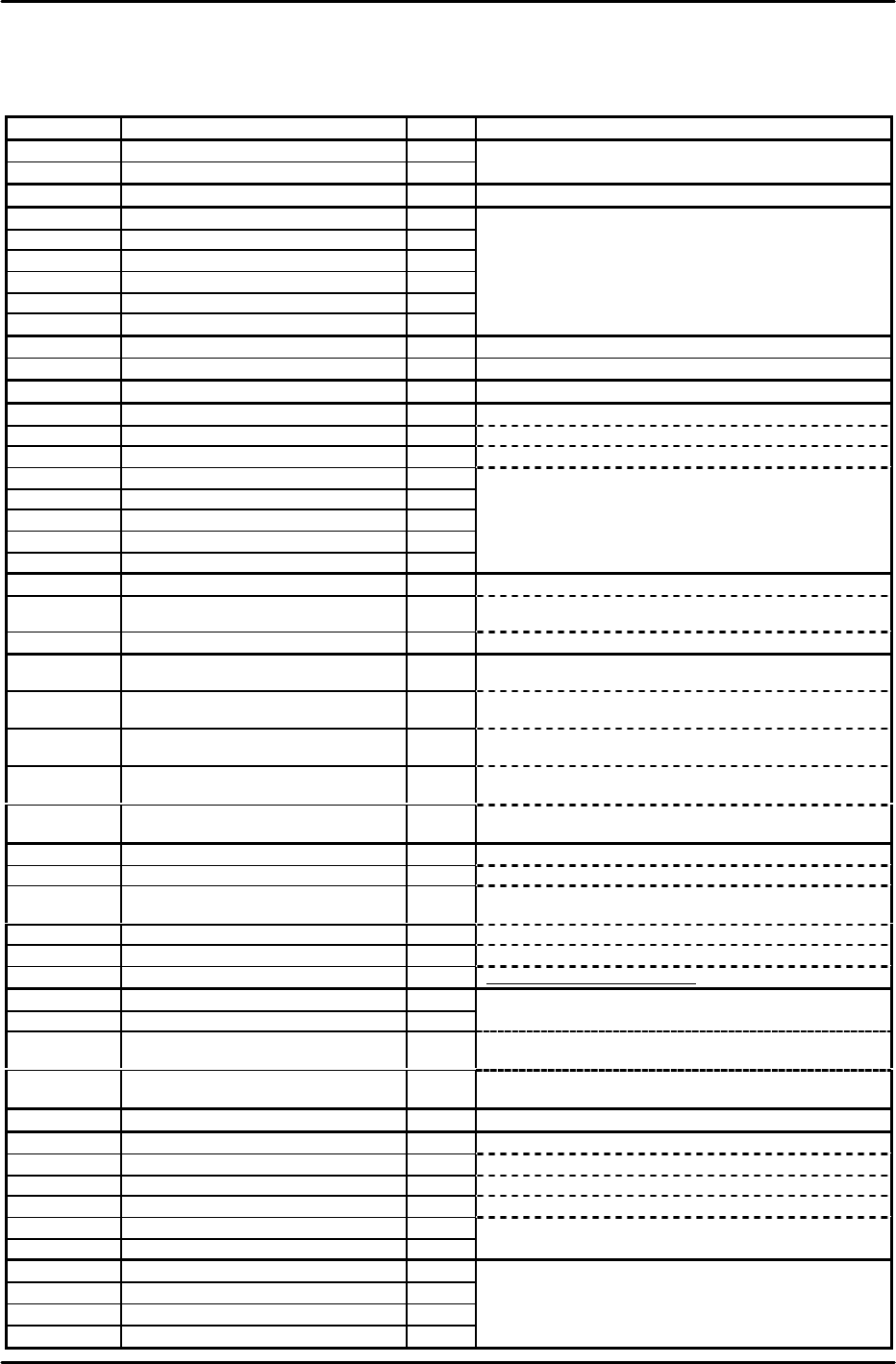
[3-1] Temporary Proper Data Transmission (Required Proper Data Details)
1) Using the following list as a reference, enter the temporary Proper data values at F4G.
Attr Caption Value Remarks
MQ2MT1 machine_type0 81
MQ2MT2 machine_type1 49
MQ2LG Language è 0: English 1: Japanese 2: French
MQ2REL Red Light 1024
MQ2YEL Yellow Light 36
MQ2BLL Blue Light 768
MQ2REB Red Flash 8
MQ2YEB Yellow Flash 8210
MQ2BLB Blue Flash 2241
User specified setting is used when designated.
MQ2MASA Machine Status A Note 4
MQ2MASB Machine Status B
Note 5
MQ2CMLP Command Line Port 12
MQ2DCSW Device Check SW 1
MQ2VFT Verifier Tool 0 Enter "2" when using the Handy Terminal.
MQ2BART Barcode Reader Type 0 Enter "5" when using the Handy Terminal.
MQ2DVCP Device Check Port 11
MQ2ESCP ESC Permission 1
MQ2MANP Man Permission 1
MQ2HTCC HT Comment Term. Code %
MQ2HTVC HT Verify Term. Code /
MQ2NPLM The Number of PLM è Enter the number of linked modules.
MQ2NVIPR The Number of Vision Processor è
Enter the number of ICM vision processing boards (COGNEX
boards).
MQ2MULT Multiplexe Type
Note 1
MQ2*MCMC PLM* Mark Camera MPX ch. No. Note 2
Specifies the multiplexer Ch. number where the mark camera is
connected.
MQ2*C(1or2)
MC
PLM* Parts Camera(1or2) MPX ch. No. Note 2
Specifies the multiplexer Ch. number where the parts camera (1
or 2) is connected.
MQ2*C(1or2)
LC
PLM* Parts Camera(1or2) LSO ch. No. Note 2
Specifies the LSO board Ch. number where the parts camera (1 or
2) is connected.
MQ2*C(1or2)
LB
PLM* Parts Camera(1or2) LSO board
No.
Note 2
Specifies the LSO board number where the parts camera (1 or 2) is
connected.
MQ2*C(1or2)
VB
PLM* Parts Camera(1or2) VP board No. Note 2
Specifies the vision processing board Ch. number where the parts
camera (1 or 2) is connected.
MQ2*HDT PLM* Head Type è Single holder type: 0 Index holder type: 1
MQ2*DVT PLM* Device Type è MFU5:0 MFU58:1 MTU6:2 MTU71:3
MQ2*C(1or2)
AT
PLM* Parts Camera(1or2) Type
è
1 2 3 4 6 7
MQ2*MASA PLM* Machine Status
Note 3
MQ2*PECW
PLM* Parts Eject Conv Width è MTU6 used M=74 MTU71 used M=50 MTU not used M=27
MQ2*MDLW
PLM* Module Width è
0:600mm 1:760mm 2:800mm
(V1.80 or newer)
Note 7
MQ2*MCGN PLM* Mark Camera Gain 0
MQ2*MCOF PLM* Mark Camera Offset 0
MQ2*C(1or2)
GN
PLM* Parts Camera(1or2) Gain Note 6 Camera type 1=0, 2=0, 3=0, 4=168, 6=0, 7=128
MQ2*C(1or2)
OF
PLM* Parts Camera(1or2) Offset Note 6 Camera type 1=0, 2=0, 3=0, 4=128, 6=0, 7=128
MQ2*OPIN Counter Output Interval 200
MQ2*EPX PLM* Escape Position X è Front:-105000 Back:105000
MQ2*EPY PLM* Escape Position Y è Front:-170000 Back:170000
MQ2*EPZ PLM* Escape Position Z
Note 7
MQ2*EP2X PLM* Escape Position2 X è Front:-90000 Back:90000
MQ2*EP2Y PLM* Escape Position2 Y 0
MQ2*EP2Z PLM* Escape Position2 Z 0
MQ2*PUT1 PLM* Pickup Timer 100
MQ2*PUT2 PLM* Pickup Timer_2 200
MQ2*PUT3 PLM* Pickup Timer_3 50
MQ2*PMTM
PLM* Placement Timer 50
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 3. QP242E Initial Adjustment (2) [2/12]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-2
MQ2*FLSS PLM* Front Light Scan Speed 288
MQ2*BLSS PLM* Back Light Scan Speed 288
MQ2*SOPH PLM* Scan Offset Pulse H 2000
MQ2*SOPM PLM* Scan Offset Pulse M 2000
MQ2*SOPL PLM* Scan Offset Pulse L 2000
MQ2*DP Device Pitch 2000
MQ2*APXY Arch Pulse XY
20000
MQ2*AHZ Arch Height Z 1400
MQ2*FNT1 PLM* Feeding On Timer 200
MQ2*FNT2 PLM* Feeding On Timer_2 100
MQ2*FNT3 PLM* Feeding On Timer_3 200
MQ2*FFT1 PLM* Feeding Off Timer 200
MQ2*FFT2 PLM* Feeding Off Timer_2 100
MQ2*FFT3 PLM* Feeding Off Timer_3 200
MQ2*P1~4BP PLM* RS232C Port1~4 BPS 2 9600
MQ2*P1~4DL
PLM* RS232C Port1~4 Data Length
1 8
MQ2*P1~4SB PLM* RS232C Port1~4 Stop Bit 0 1
MQ2*P1~3PA PLM* RS232C Port1~3 Parity 0 NONE
MQ2*P4PA PLM* RS232C Port4 Parity 2 EVEN * Note
MQ2*FPSP PLM* Flux Pump SCU Port 3
MQ2*PPCP PLM* PPC Port 0 Enter "2" at systems with a placing pressure control function.
MQ2*LLLP PLM* LLL Port 3
MQ2*LLUP PLM* LLL Upload Port 1
MQ2*PECW PLM* Parts Eject Conv Width
à
MTU6: M=74 MTU71: M=50 MTU not used =27
MQ2A(1or2)LL0 PLM* Camera(1or2) Level Limit 0
à Camera type 1=100 :2=50 :3=50 :4=0 :6=0 :7=0 :8=0 :9=0
MQ2A(1or2)LL1
PLM* Camera(1or2) Level Limit 1
à
Camera type 1=0
:2=100
:3=100
:4=100
:6=100
:7=100
:8=100
:9=70
MQ2A(1or2)LL2
PLM* Camera(1or2) Level Limit 2
à
Camera type 1=0
:2=100
:3=100
:4=0
:6=0
:7=35
:8
=0
:9=0
MQ2A(1or2)LL3
PLM* Camera(1or2) Level Limit 3
à
Camera type 1=0
:2=100
:3=100
:4=35
:6=0
:7=35
:8=0
:9=0
MQ2A(1or2)DT0
PLM* Camera(qor2) Dev Tol 0
à
Camera type 1=40
:2=10
:3=10
:4=0
:6=0
:7=0
:8=0
:9=0
MQ2A(1or2)DT1
PLM* Camera(qor2) Dev Tol 1
à
Camera type 1=0
:2=10
:3=10
:4=10
:6=10
:7=10
:8=10
:9=10
MQ2A(1or2)DT2
PLM* Camera(qor2) Dev Tol 2
à
Camera type 1=0
:2=10
:3=10
:4=10
:6=0
:7=10
:8=0
:9=0
MQ2A(1or2)DT3
PLM* Camera(qor2) Dev Tol 3
à
Camera type 1=0
:2=10
:3=10
:4=10
:6=0
:7
=10
:8=0
:9=0
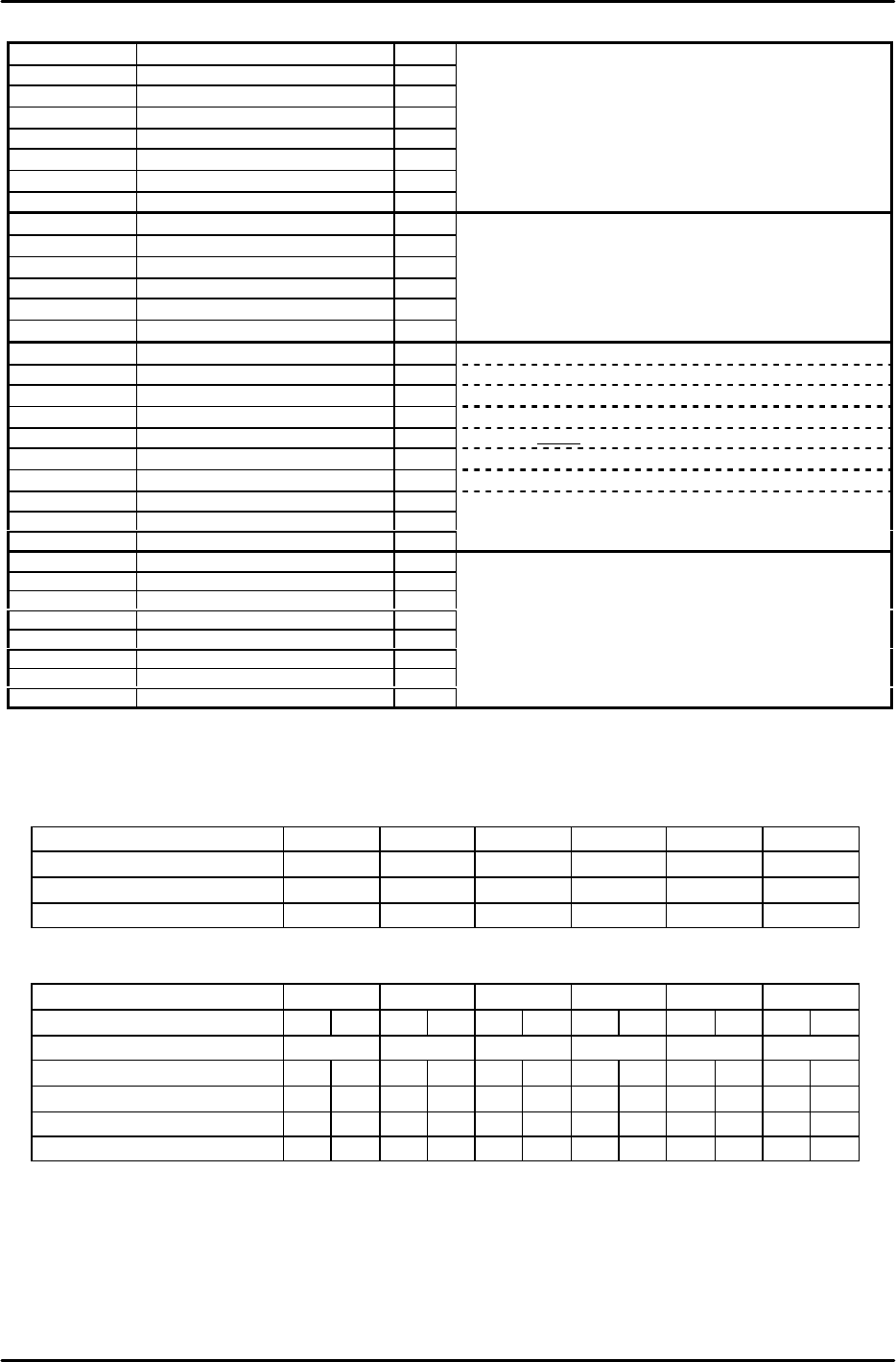
Note: "*" indicates the module No. (Attr is A to F, Caption is 1 to 6)
Note 1: Multiplexe Type
0: VSM12 (Up to 12 connector channels for CCD camera connection
1: VSM18 (Up to 18 connector channels for CCD camera connection
2: NON (Multiplexer is not used)
Note 2:
Module No. 1 2 3 4 5 6
Mark Camera MPX ch No. 1 3 5 7 9 11
Parts Camera1 MPX ch No. 2 4 6 8 10 12
Parts Camera2 MPX ch No. 13 14 15 16 17 18
Enter "0" as the parts camera (1 or 2) MPX No. for modules without CCD cameras.
LSO channel numbers are assigned in sequence beginning from "1", with up to 4 numbers being assigned to each LSO.
[Ex] Number assignments would be as shown below for the following: ICM-(CCD CCD)-(CCD CCD)-(CCD LS)-(CCD LS)-(CCD)-(CCD LS)
Module No. 1 2 3 4 5 6
Camera(1or2) Type CCD CCD CCD CCD CCD LS CCD LS CCD LS CCD LS
Mark Camera MPX ch No. 1 3 5 7 9 11
Parts Camera(1or2) MPX ch No. 2 13 4 14 6 0 8 0 10 0 12 0
Parts Camera(1or2) LSO ch No. 0 0 0 0 0 1 0 2 0 3 0 4
Parts Camera(1or2) LSO board No. 0 0 0 0 0 1 0 1 0 1 0 1
Parts Camera(1or2) VP board No. 1 1 1 1 1 1 1 1 1 1 1 1
Note 3: PLM* Machine Status
0: For machines with parts supplied from the front
1: For MOTOROLA special 2-stop conveyor
2: For MOTOROLA special sensor block skip
4: For machines with parts supplied from the rear
8: For flux application after vision processing
16: Part pick-up confirmation sensor
32: For module PCB impact support (V1.3D or newer)
64: TZ axis up/down interlock disabled when MTU7 shuttle is at its advance limit
128: Nozzle size check tolerance of 0.3mm. ("0.15mm" is adopted if not specified.) As a rule, this setting should not be