QP-242E 工程师培训手册 (6.0).pdf.pdf - 第90页
FK-9F98-07 QP242E Training Text for Service Engineers 6th edition 10. STU Adjustment & Operation Check [ 4 /8] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Section …
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 10. STU Adjustment & Operation Check [3/8]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
10-3
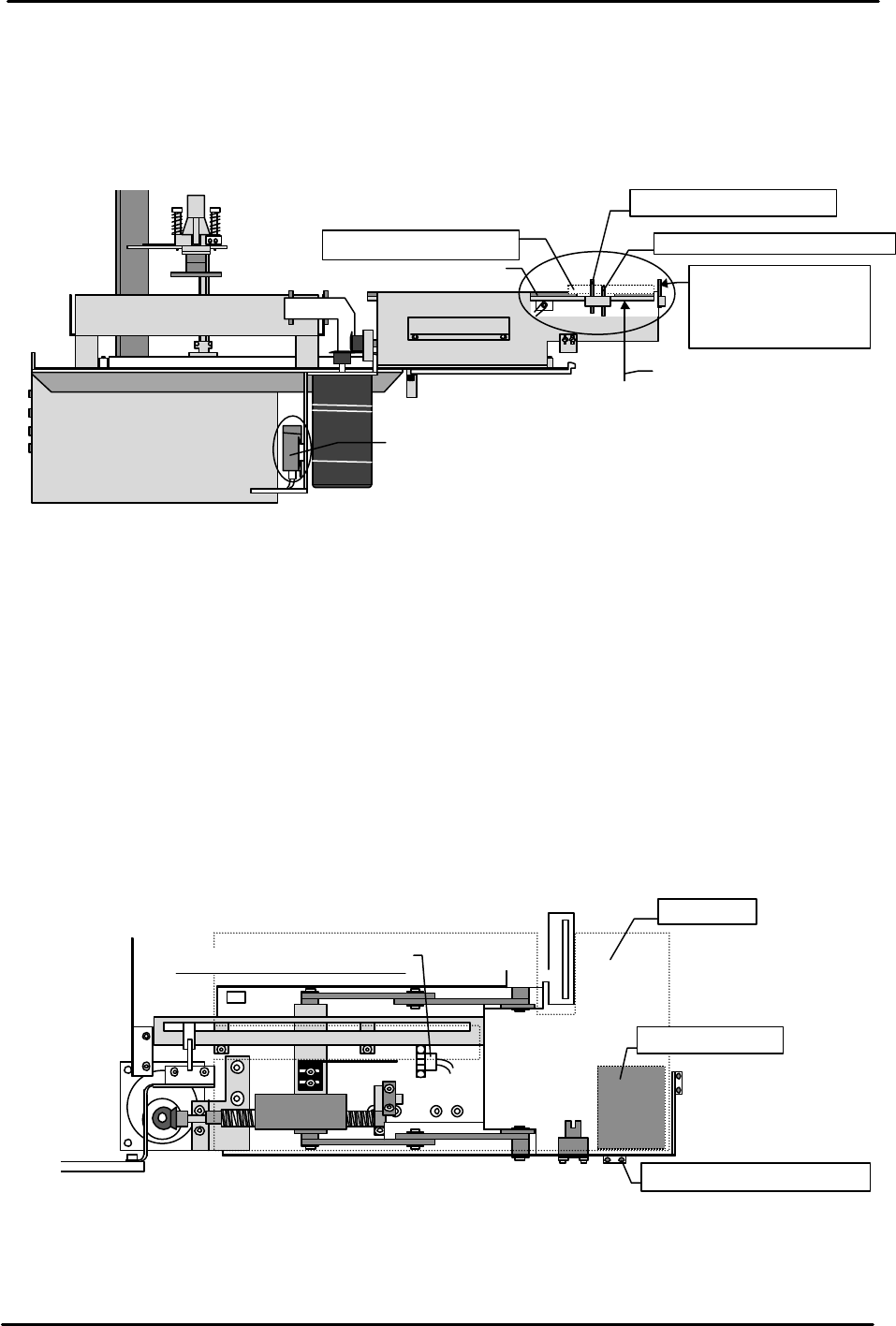
5) Move the sensor up and down to adjust it so that the height at which the holder stops is the same
height as the Proper data IPD0_Z height measured in section 7.22. Use the adjacent jig and a
scale to check the height as it is adjusted.
6) After the height of the tray position check sensor is adjusted, load a 2 mm thick board on the top
of the empty tray. Adjust the sensor height so that this board is detected by the add check sensor
but so that the Fuji standard 1.6 mm thick board is not detected.
[10-6] Tray Existence Check Sensor Adjustment
1) Lower the empty tray that was loaded in the previous section and then load a 2 mm thick board
on the tray holder.
2) Loosen the tray check sensor dog attached to the bottom of the STU and then move the dog to a
position where the sensor will not come on even if raised when there is no tray.
3) Turn the I/O Y02D SEND PART D9 on and raise until the top of the 2 mm board is detected by
the tray position check sensor.
4) At the position where the top of the board is detected, use the dog that was loosened earlier to
adjust the tray check sensor so that it comes on at the same time.
5) After adjustment is completed, remove the board, set the I/O SEND PART D9 on with no tray on
the holder and then raise the holder.
- After the tray holder rises to the tray position check sensor, if the sensor determines that no tray
exists and then descends this completes adjustment of the sensor.
- If the tray holder does not descend but stops at the tray position check sensor position then the
tray check sensor must be adjusted again.
View from the
side of the STU
Tray eject box
Sensor amp
Empty tray
2.0 mm thick board
Tray add check sensor
Tray position check sensor
Adjust the sensor
up or down so that
it is at the same
height as IPD0_Z.
Use the I/O to raise
the tray holder.
Upper limit check sensor
Tray holder
2mm thick board
Tray position check sensor
View from the top of the STU
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 10. STU Adjustment & Operation Check [4/8]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
10-4
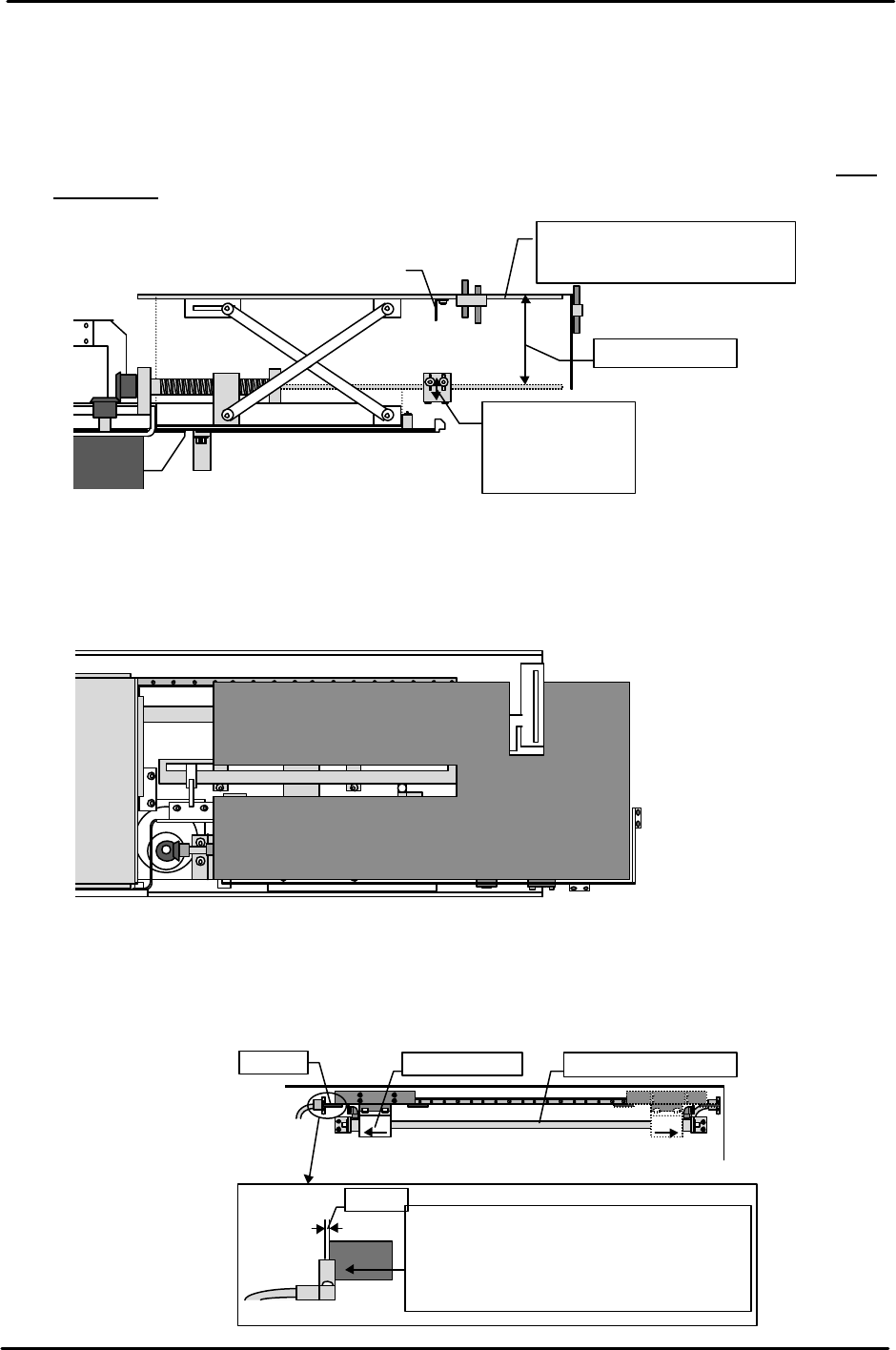
[10-7]
Tray Holder Lower Limit Sensor Adjustment
The tray holder position at which adjustment in the previous section finished should be the lower
limit. Mark the position of the top of the tray holder. Then go to the I/O and just as was done in the
previous section raise the holder with no board loaded. Verify that the distance from the marked
position to the top of the tray holder when it stops at the tray position check sensor is greater than
the maximum tray stacking height of 50 mm.
If the distance is less than 50 mm then lower the mounting bracket to adjust the distance to more
than 50 mm.
[10-8]
Tray Holder Parallel Measurement
Use a dial gauge to measure the parallelism of the top of the tray holder at the upper limit and lower
limit.
[10-9]
Tray Remover Forward and Retract Limit Adjustment
When at both the forward limit and retract limit mechanical stopper positions, loosen the dog and
move it until the sensor goes off. Then move the dog back to find the position at which the sensor
comes on. From this position move the dog back another 1 mm and secure it in place.
Forward limit
Retract limit
Mecha-stopper Remover air cylinderDog
1mm
Move the dog while at the mechanical
stopper position. Move the dog another
1 mm from the position at which the
sensor comes on and secure the dog in
place in that position.
Raise or lower
the sensor to
adjust the
distance to more
More than
50mm
Dog
Tray holder
Upper limit when stopped at
the tray position check sensor.
( )
View from
the top of
the STU
①
②③
④
⑤
⑥⑦
Tolerance : within 0.5mm
1.( )
2.( )
3.( )
4.( )
5.( 0mm)
6.( )
7.( )
FK-9F98-07 QP242E Training Text for Service Engineers
6th edition 10. STU Adjustment & Operation Check [5/8]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
10-5
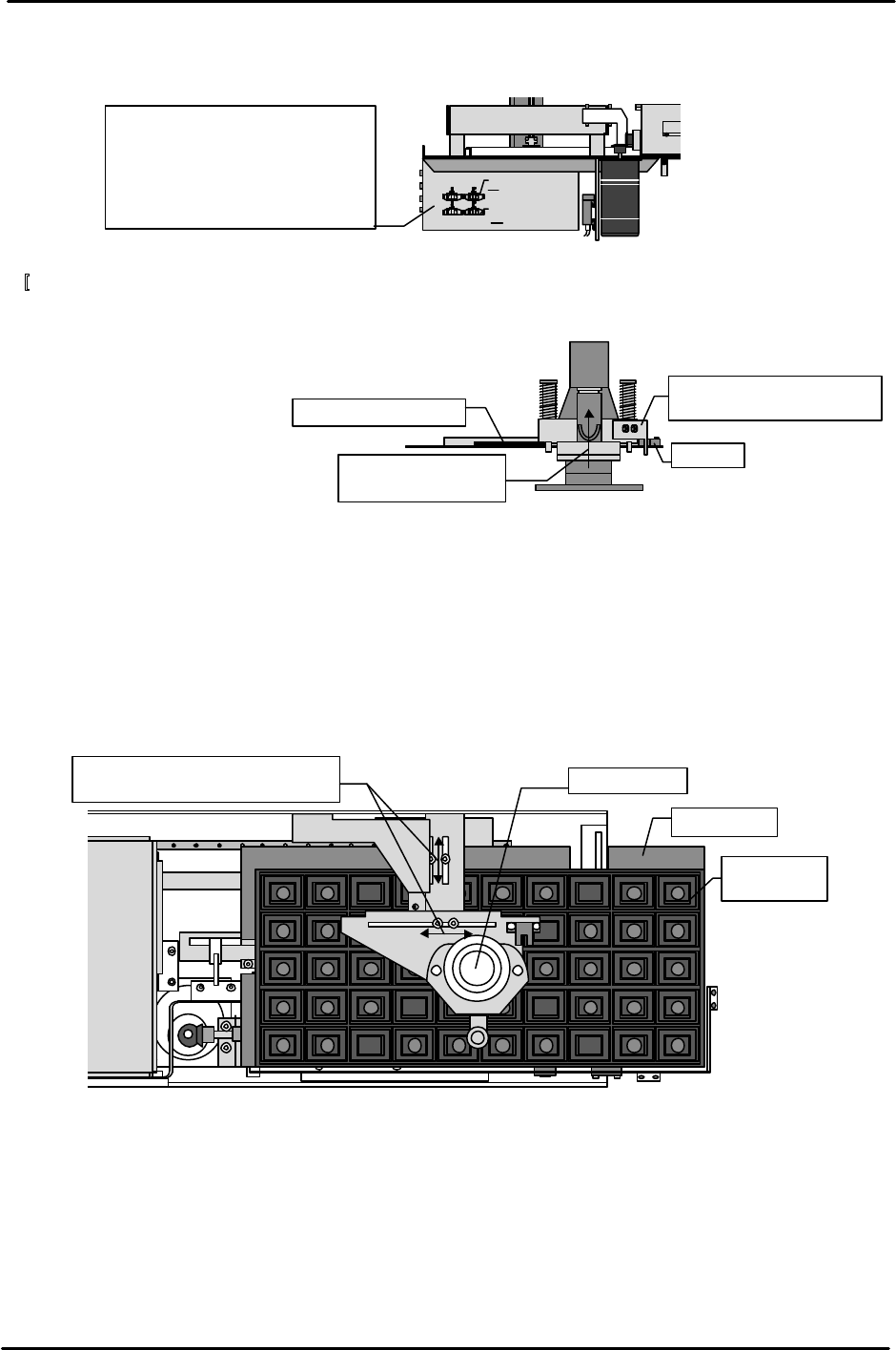
[10-10]
Tray Remover Forward and Retract Speed Adjustment
Adjust the forward and retract speed as follows using the speed controllers installed on the side of
the STU control box.
[
10-11]
Tray Remover Upper Limit Sensor Adjustment
1) Insert a 2 mm clearance gauge so that the remover is elevated.
2) Move the dog to adjust the upper limit sensor so that it comes on in this 2 mm elevated position.
[10-12] Tray Remover Provisional Position Adjustment
1) Set a standard 100-pin size empty tray in the STU tray holder.
2) Advance the remover.
3) Move the remover mount bracket to adjust it so that the center of the remover aligns with the
center of the empty tray.
* Since the STU itself is not servo controlled, the tray remover position must be moved to the center
of the tray dimensions of each tray type. The standard 100-pin size tray is used here for measuring
but other boards should be adjusted to match each tray size.
Use the dog to adjust the
sensor so that it comes on.
Sensor
2mm feeler gauge
Raise 2 mm using
the
feeler
gauge
View from the
side of the STU
Tray eject box
Advance
Retract
From the fully closed status
Top right Open 5.25 turns
Top left Open 1.5 turns
Bottom right Open 2.5 turns
Bottom left Open 6.25 turns
Move the bracket and then
move the remover to the center.
View from
top of STU
Tray holder
Empty tray
(100pin)
Tray