XP141E 系统手册SYS-XP141-1.0S.pdf - 第138页
第 6 章 文档操作 第 3 部 XP-141E 系统手册 3-3-26 Edition 1.0 自动供料器触发器 ( 当前不支持标准机型 ) 不对应供料平台转换模式 (AA) 而为标准机型时, 当程序中的供料器安装中有次料站时, 下面是吸取元件时切换供料器位置的条 件。 0 : Error : 料尽、吸取错误、影像处理错误等的 元件相关错误发生时, 切换为次料站。 1 : No Part : 只有在料尽时才切换为次料站。 2 : Mi…
第 3 部 第 3 章 编辑器
Edition 1.0 3-3-25 XP-141E 系统手册
Pick-up Point Offset Y
不想从指定料站的 X 方向的中心处吸取供料器供应的元件时用此设定。Direction 为 0
时,要向进深修正 5mm 时请输入“5”。(-12.7mm-12.7mm)
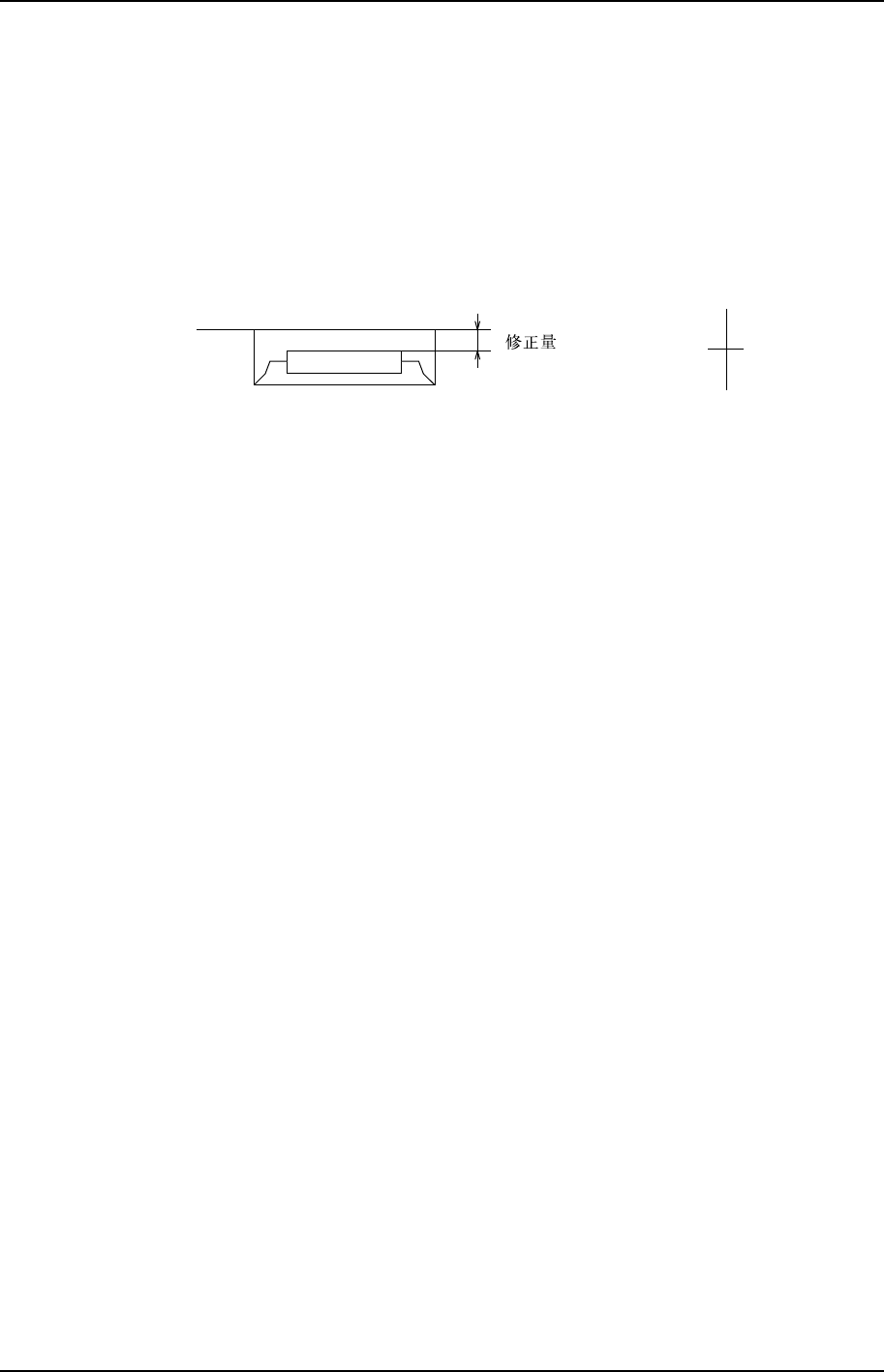
Pick-up Point Offset Z
不想从指定料站的通常高度吸取供料器供应的元件时用此设定。要向下修正 1mm 时请输
入“-1”。(-12.7mm-12.7mm)
MCSX336CM
Z (+)
Z (-)
Part Transport Speed
对于较重元件,根据从吸取到贴装之间的传送速度有可能使吸嘴产生偏移。为防止因传
送速度过快引起偏移。在此设定的速度适用于机器在持有元件期间的全部的伺服轴的速
度。将输入“0”时作为 100%,在吸取元件期间,此值和 Soft Pick Speed、Slow Place
Speed、Soft Place Speed 中的最慢的速度为有效(0%~100%)。
Placing Offset X
以 Direction 为 0 并且贴装角度为 0°作为基准设定 X 方向的贴装修正量。(-100.00mm
~100.00mm)
Placing Offset Y
以 Direction 为 0 并且贴装角度为 0°作为基准设定 Y 方向的贴装修正量。(-100.00mm
~100.00mm)
Placing Offset Z
以 Direction 为 0 并且贴装角度为 0°作为基准设定 Z 方向的贴装修正量。(-100.00mm
~100.00mm)
第 6 章 文档操作 第 3 部
XP-141E 系统手册 3-3-26 Edition 1.0
自动供料器触发器(当前不支持标准机型)
不对应供料平台转换模式(AA)而为标准机型时,当程序中的供料器安装中有次料站时,
下面是吸取元件时切换供料器位置的条件。
0: Error: 料尽、吸取错误、影像处理错误等的元件相关错误发生时,
切换为次料站。
1: No Part: 只有在料尽时才切换为次料站。
2: Miss: 料尽时或吸取错误时切换为次料站。
在移动到下一个供料器位置时如下进行。
<补件模式 ERROR STOP 时>
根据错误发生按下显示的[Part out]键时,或料尽错误发生时,在按下其画面中的
[Close]键时,成料尽状态,移动到下一个位置进行吸取。
<补件模式为自动补件时>
即使指定的补件次数结束也不能消除错误时,无条件地移动到下一个位置进行吸取元件。
Recovery Times
机器的补件模式设定为自动补件时,以在此设定的补件次数进行补充。(0~255)
注意:在机器上设定的补件次数仅在元件数据中没有设定补件次数时有效。
Vision
Vision Type
将元件形状作为 Vision Type 从以下进行选择。显示出数据的设定条件,但不意味着影
像处理能力,保证范围。
注意:在 Vision Type18 以外、即使将对象元件的影像由自动生成的模板进行处理、也不可能完
全不发生错误,发生错误时,在选择 Vision Type18 后,请参考 MSA 影像处理说明书
或本手册第 4 部“影像处理”,生成模板文件,确认影像处理是否正常后,再进行元件的
贴装。
10: Square chip(对象尺寸∶0603~4532)
18: XP 的其他设定(XP-141E 机器除 10、20 以外均为此值。)
20: SOT(Small outline transistor)(引脚根数最大为 5 根/要素、2 要素是上下
或者左右对称存在的,1 个要素不属于此范畴。)

第 3 部 第 3 章 编辑器
Edition 1.0 3-3-27 XP-141E 系统手册
Camera Position
选择用于元件影像处理的相机。
0 :Auto 由机器自动选择
1 :Front 选择机器前侧的相机
2 :Rear 选择机器后侧的相机
[0]Auto 的条件
机器前侧的供料器元件 :Auto
机器后侧的供料器元件 :Front
机器后侧的料盘元件 :Rear
Binary Process
输入 0 后进行灰度等级影像处理。
输入 0 以外的数值后进行二进制影像处理。
在相机影像中出现元件(画有查找线处部分)和背景(吸嘴)间的界限模糊而无法进行影像
处理时,输入 0 以外的值,调整到能进行影像处理。(0~255)
但是,在 Vision Type 为 130,230,231 时不能使用。