JM-20_EPU使用说明书.pdf - 第120页
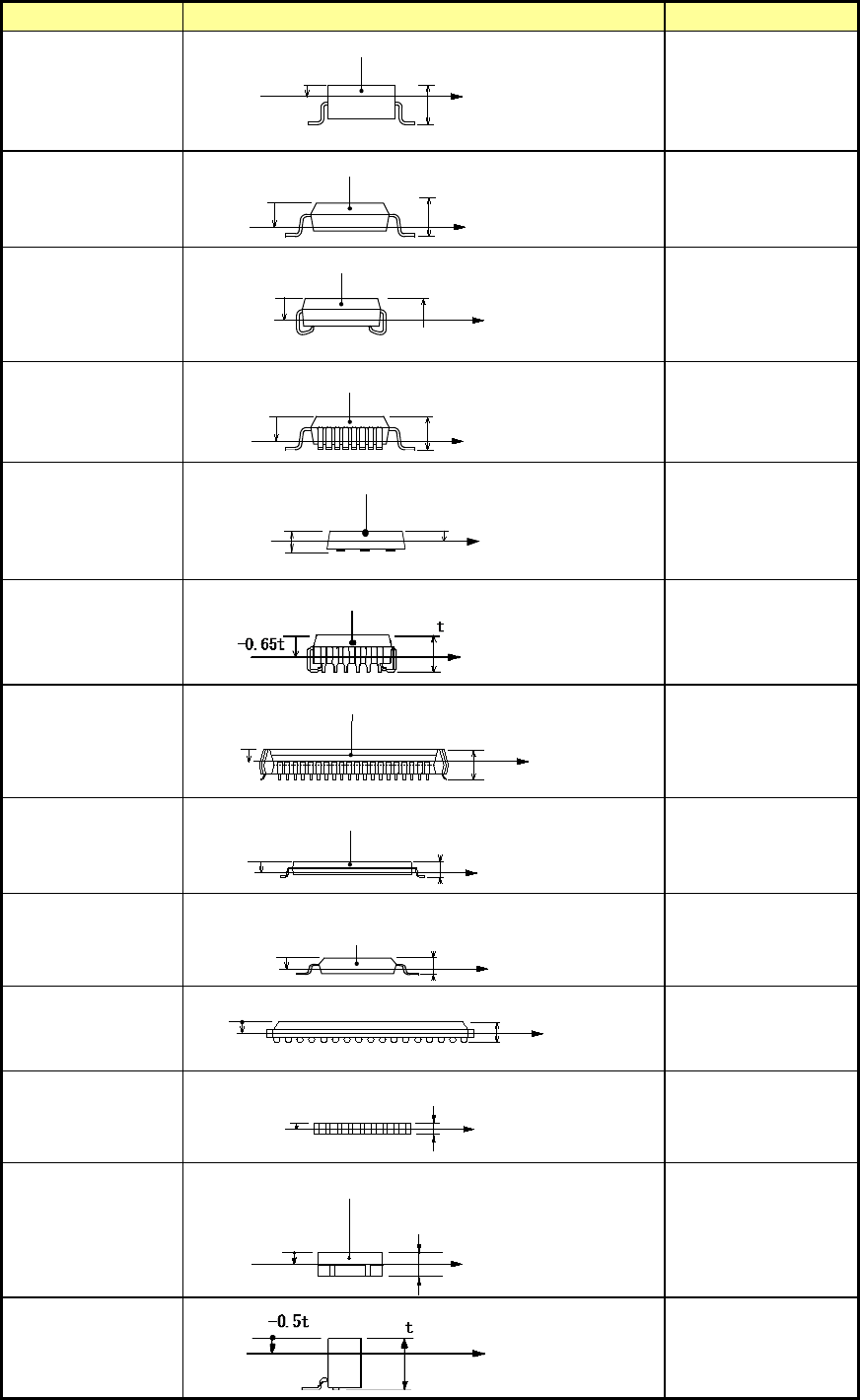
EPU 使用说明书 第 4 章 制作生产程序 4- 69 元件种类 测量 位置 测量高度 (mm) J 引脚插座 レーザ 部品高 t 0 0 鸥翼式插座 レーザ 部品高 t 0 0 带减震器的插座 レーザ測 部品高 t 0 0 插入 元件 - (t - 1) INS 电解电容器 - (t - 1) 其他元件 レーザ測定 部品高さ t モールド部 -0.5t -0.5 ×t 注 1 :对 06 03 电阻等方形芯片元 件贴片, 当发生角度…
EPU 使用说明书 第 4 章 制作生产程序
4-68
元件种类
测量位置
测量高度(mm)
SOT
レーザ測
モールド部
部品高さ
t
-γ
-Y
Y=0.25
SOP
HSOP
レーザ測定
モールド
部品高さ
t
-0.7t
-0.7×t
SOJ
レーザ測
モールド
部品高
t
-0.65
-0.65×t
QFP
レーザ測定
モールド部
部品高さ
t
-0.7t
-0.7×t
QFN
レーザ測定位置
モールド部
部品高さ
t
-0.5t
-0.5×t
QFJ(PLCC)
※LNC120
- 0.65 × t
PQFP(BQFP)
レーザ
モールド
部品高
t
-0.45
-0.45×t
TSOP
レーザ測定
モールド
部品高
t
-0.7t
-0.7×t
TSOP2
レーザ測
モールド
部品高
t
-0.7t
-0.7×t
BGA
FBGA
レー
部品
t
-0.
-0.86×t
网络电阻
レーザ測
部品高
t
--
2
t
与方形芯片相同
微调电容器
レーザ測定
部品高さ
t
モールド部
-(t - 0.7)
- (t - 0.7)
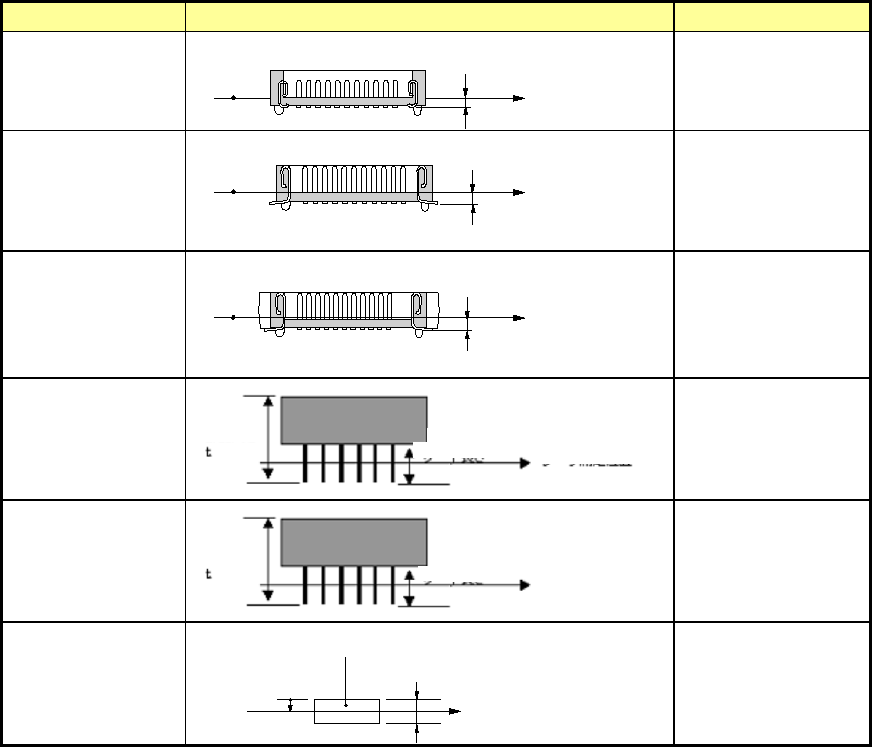
单向引脚连接器
双向引脚连接器
Z 形引脚连接器
- 0.5×t
激光测定位置
模部
元件高度
激光测定位置
元件高度
模部
元件高度
激光测定位置
元件高度
模部
激光测定位置
模部
元件高度
激光测定位
置
元件高度
模部
模部
元件高度
激光测定位置
模部
元件高度
激光测定位置
模部
模部
元件高度
激光测定位置
模部
激光测定位置
模部
元件高度
元件高度
激光测定位置
元件高度
激光测定位置
元件高度
模部
激光测定位置
激光测定位置
元件高度
EPU 使用说明书 第 4 章 制作生产程序
4-69
元件种类
测量位置
测量高度(mm)
J 引脚插座
レーザ
部品高
t
0
0
鸥翼式插座
レーザ
部品高
t
0
0
带减震器的插座
レーザ測
部品高
t
0
0
插入元件
- (t - 1)
INS 电解电容器
- (t - 1)
其他元件
レーザ測定
部品高さ
t
モールド部
-0.5t
-0.5×t
注 1:对 0603 电阻等方形芯片元件贴片,当发生角度偏差时,在元件数据的[定心]选项卡画面中,
将[激光高度]的数值向元件上面移动–t/3 (默认值为–t/2),有时可以改善。
元件高度
激光测定位置
激光测定位置
元件高度
激光测定位置
元件高度
激光测定位置
元件高度
激光测定位置
元件高度
激光测定位置
元件高度
模部
引脚长度
引脚长度
EPU 使用说明书 第 4 章 制作生产程序
4-70
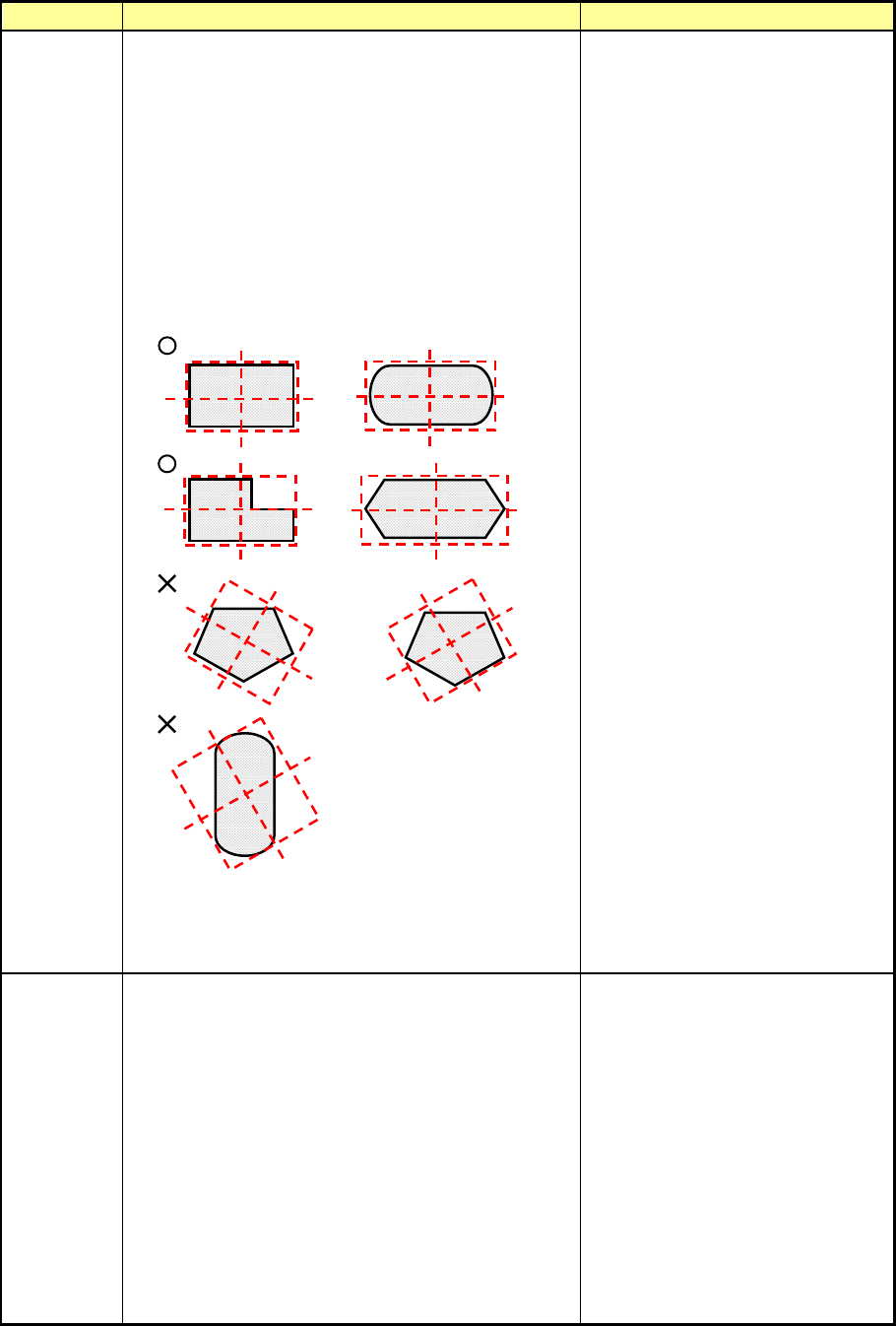
4)元件形状
可指定激光识别用的元件形状。主要用途如下所示。
元件形状
动作
用途
Config1
针对元件检测出外接接线,以最小四边形界定外
接接线,对位置偏差、角度偏差进行计算、补正
,
然后实施贴片。
为了计算四边形界定区域的位置偏差、角度
偏差,
使用形状近似正方形以及长方形的元件。
即使是包含圆角的元件,也可以识别出在直线位
置下的元件。若下部位置为圆形时,因为角度不
确定,无法识别。
为多边形时,无法明确界定外接四边形,所以无
法稳定识别。
形状近似正方形、长方形的元件
Config2
Config1 无法识别,使用多边形元件。
在计测过程中元件旋转时,光照到元件的影幅发
生变化。按照该影幅的变化量计算元件的位置偏
差、角度偏差。
在最开始,找到影幅最小的点 (第一最小点),之
后继续旋转元件,找到下一影幅最小点(第二最小
点)。根据这 2 点,计算出元件的位置偏差、角度
偏差。
因为是以影幅计算位置偏差、角度偏差,所以为
不易受元件外形影响的识别方法。
Config1 无法识别的异形元件
或