JM-20_EPU使用说明书.pdf - 第124页
EPU 使用说明书 第 4 章 制作生产程序 4- 73 正三角形在下 图情况 下, 将 红线边 作为基准时, 输入 180 °。 正三角形在下图 情况下,将 红线边作为 基准时,输入 270 °。 6 )吸嘴显示 显示吸嘴图像、 吸嘴外形尺寸、适用 元件尺寸。 7 )夹式吸嘴 数据 ①抓取位置 “Y” 项,输入元 件中心至夹式 吸嘴固定侧手臂抓取 面(紧贴面)中 心的偏 移值(a) ,要输入负数 。 “X” 项只可输入 0 ,不可输入…
EPU 使用说明书 第 4 章 制作生产程序
4-72
在 Config4 中激光识别角度的计算,是以元件的边为基准进行角度计算的。测量对象元件的边距离
基准边多少,将作为激光识别角度的结果。
因为以边作为基准,所以边长越长,激光识别角度就越正确。因为需要输入角度,角度输入推荐指
定简单的水平、垂直的边。若指定其他的边,需要输入正确的角度。
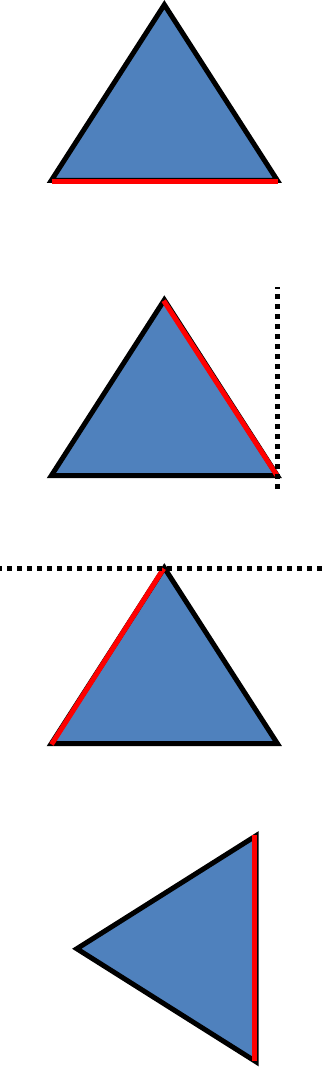
吸取元件并旋转 0°的状态(作成元件数据时的元件状态)作为最初的基准。
以正三角形的元件为例,进行以下说明。
正三角形在下图情况下,以下边作为基准时,请输入 0°(下图的红线)。在该状态下,与 JM-10 的
flexible 3 以相同边作为基准。
正三角形在下图情况下,将红线边作为基准时,输入 120°。
正三角形在下图情况下,将红线边作为基准时,输入 240°。
正三角形在下图情况下,将红线边作为基准时,输入 90°。
30
60
EPU 使用说明书 第 4 章 制作生产程序
4-73
正三角形在下图情况下,将红线边作为基准时,输入 180°。
正三角形在下图情况下,将红线边作为基准时,输入 270°。
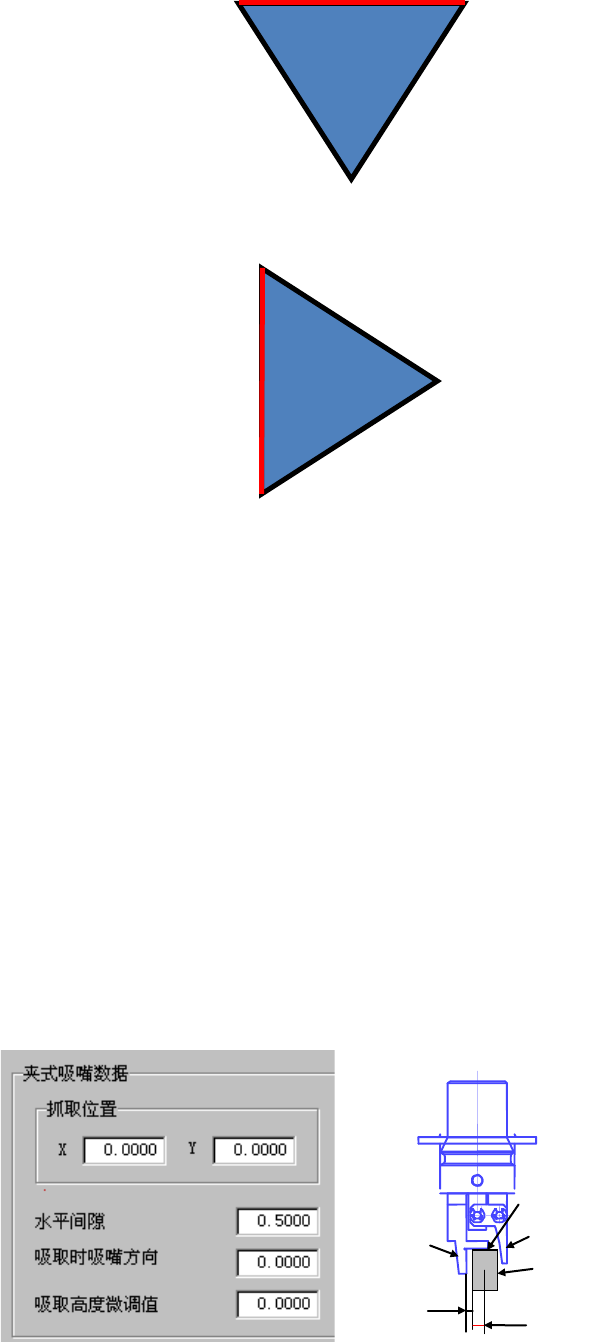
6)吸嘴显示
显示吸嘴图像、吸嘴外形尺寸、适用元件尺寸。
7)夹式吸嘴数据
①抓取位置 “Y”项,输入元件中心至夹式吸嘴固定侧手臂抓取面(紧贴面)中心的偏
移值(a),要输入负数。
“X”项只可输入 0,不可输入其他数据。
②水平间隙 夹式吸嘴固定侧卡头的固定臂面与元件之间的间隙(b),要输入负数。
通常设置为自动输入的默认值。
③吸取时吸嘴方向 指的是,吸取以 0 度状态供应的元件时的吸嘴方向。
请指定 0 度、90 度、180 度、270 度中的一项。
④吸取高度微调值 吸取时吸取高度的校正值(c 与元件上表面之间的间隙)。
通常,为了将元件保持水平,设为-0.5mm。
a
b
元件
c
固定臂
抓取位置(
a)
摇臂
水平间隙(
b
)
EPU 使用说明书 第 4 章 制作生产程序
4-74
<
使用夹式吸嘴时的设置项目
>
除上述“吸嘴数据”外,夹式吸嘴的下述设置与通常的元件不同。
①使用新夹式吸嘴时,先通过「机器设置」中的“文件”/“读出吸嘴数据”,读入夹式吸嘴的信息。
②将吸嘴安装到 ATC 上。
将夹式吸嘴安装到 ATC 单元上,从正面看,夹式吸嘴的固定臂应在后面,摇臂应在近前。
安装大型夹式吸嘴至 ATC 单元,臂左右运动时,应安装成固定臂向右侧,摇臂向左侧的方式。
③设置元件数据。
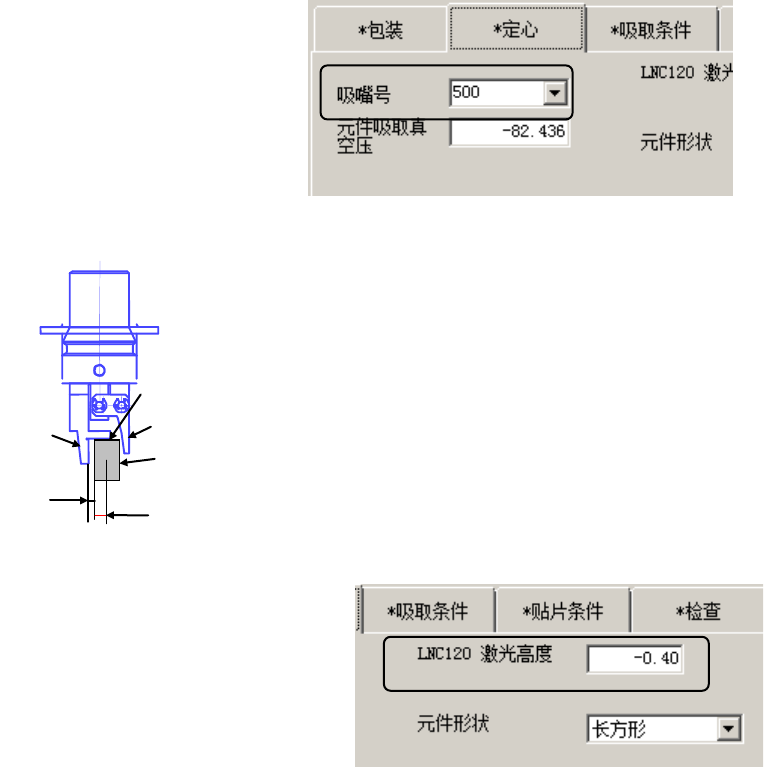
a.设置吸嘴编号
通过设置的编号吸嘴信息判断吸嘴的种类。
设置吸嘴编号时,上述“吸嘴数据”的①
抓取位置 Y 被自动设置。
b.设置激光高度
指定从固定臂前端到激光面的距离。
设置基准:-(元件高度-3.5mm
※
)/2,根据引脚位置进行微调。
※ 从“c”至固定臂的距离=3.5mm
设置的参考:为-(元件高度-元件接触面深度
※
)/2,
根据引脚的位置进行微调整。
例:元件高度 5mm、元件接触面深度 2.8mm 时
-(5-2.8) / 2 = -1.10mm
为插入元件时,
设置的参考:-元件高度+元件接触面深度
※
+1,
根据引脚的位置进行微调整。
例:元件高度 5mm、元件接触面深度 2.8mm
时
-5 + 2.8 + 1 = -1.2mm
※图中“c”至固定臂之间的尺寸
从对象吸嘴的吸嘴文件取得(因吸嘴不同而不同)
④设置吸取数据。
以夹紧部中心示教XY。由于Z是利用机器设置中已注册的吸嘴信息与元件高度自动计算的,
因此无需示教。
7) 推进量-负荷图的显示
根据不同的选择吸嘴,显示推进时的行程与负荷的关系图。
a
b
元件
c
固定臂
摇臂
水平间隙(
b
)
抓取位置(
a)