JM-20_EPU使用说明书.pdf - 第153页
EPU 使用说明书 第 4 章 制作生产程序 4- 102 4-1-4-2- 9 图像 用 VC S 摄像 机输入用于元件 定心的信息 。 设置的信息,根 据元件类型会有不同 。 图像定心,即是 通过 VCS 摄像机识别元件 的明亮部分(引 脚、球等),进行 定心。 另外,通过图像 定心还可检测出引脚 弯曲、球变形 等不良状况。 为了进行定心、 检测不良状况,必 须在图像数据中输 入引脚、球形等尺寸 ,及设置不良状况 的检测 级别等。 …
EPU 使用说明书 第 4 章 制作生产程序
4-101
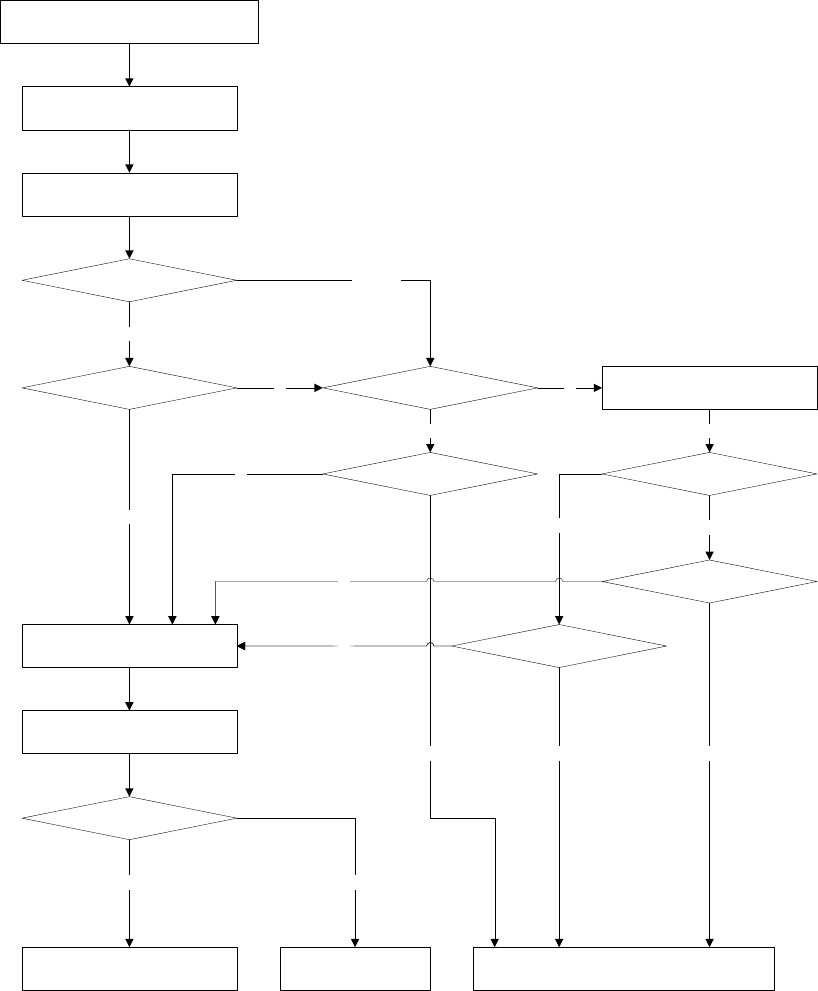
HMS 测定动作的流程如下所示。
测定成功?
START
(通过从径向供料器的吸取判定无元件)
重新吸取
不能测定
送料
吸取次数<=重试次数
Yes
设定夹紧ON时,夹紧
移动到元件有无测定位置的第1点
错误原因
“元件用完”
No(重试超限)
错误原因
“元件用完(吸取错误)”
有元件?
测定成功
无
设定夹紧ON时解除夹紧
测定成功?
有 是
不能测定
有元件?
测定成功
無し
有
不能HMS测定时?
有
无
检查个数为「2」? 移动到元件有无测定位置的第2点
是
无
不能HMS测定时?
无
有
否
EPU 使用说明书 第 4 章 制作生产程序
4-102
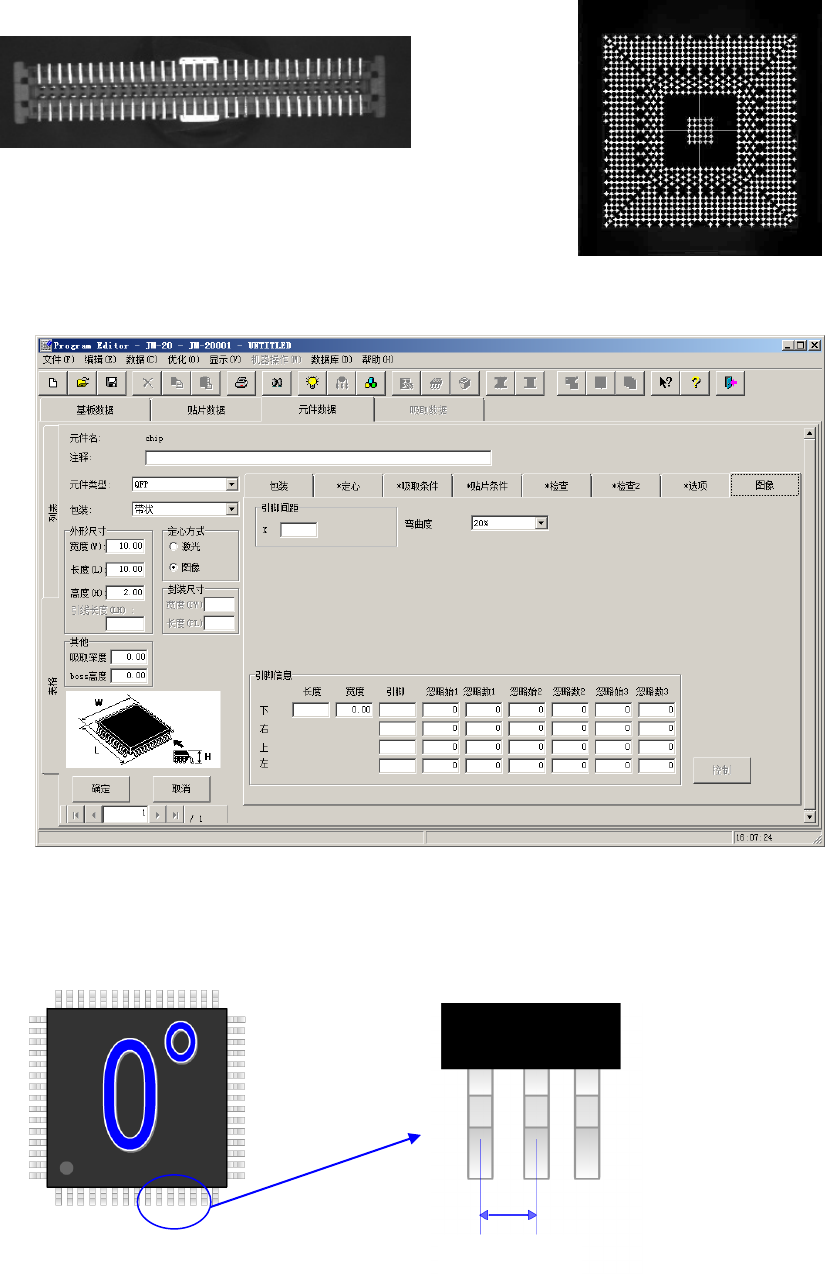
4-1-4-2-9 图像
用 VCS 摄像机输入用于元件定心的信息。
设置的信息,根据元件类型会有不同。
图像定心,即是通过VCS摄像机识别元件的明亮部分(引脚、球等),进行定心。
另外,通过图像定心还可检测出引脚弯曲、球变形等不良状况。
为了进行定心、检测不良状况,必须在图像数据中输入引脚、球形等尺寸,及设置不良状况的检测
级别等。
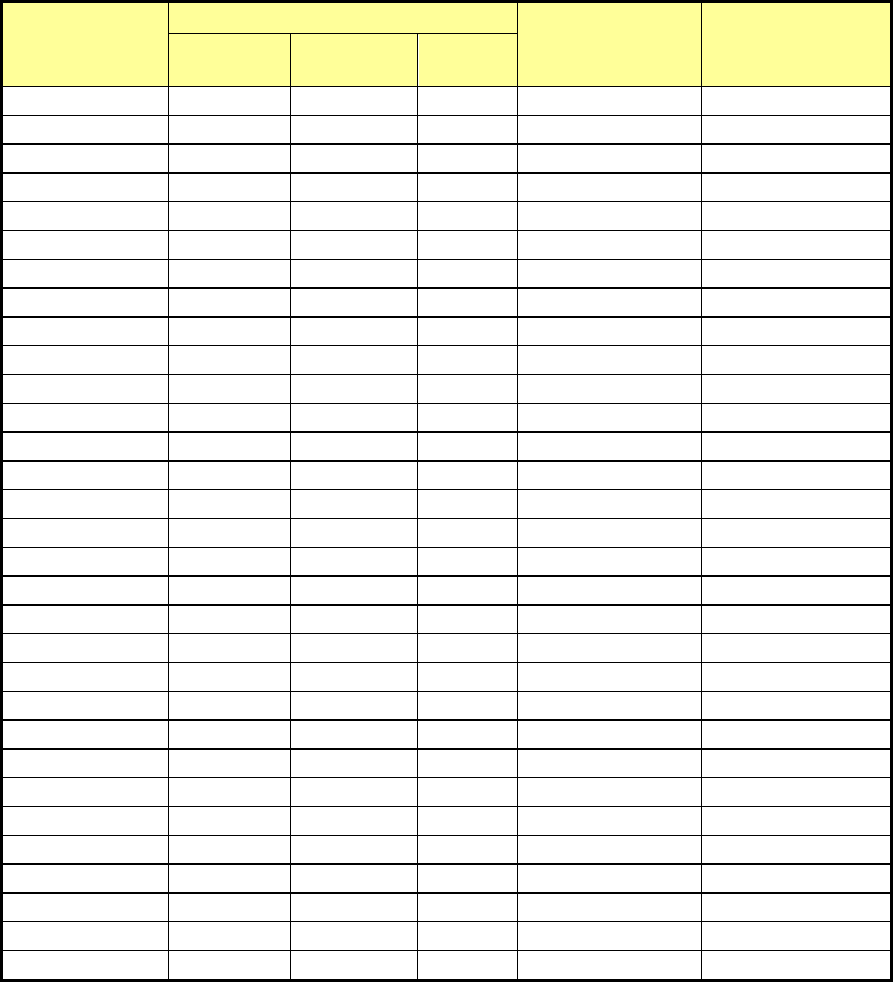
・ 图像定心对象元件
元件种类
图像识别
引脚形状等
参考:可否激光
识别
54mm
视野摄像机
27mm
视野摄像机
DFFP
摄像机
方形芯片
× × -
— ○
方形芯片
(LED)
× × -
— ○
圆筒形芯片
× × -
— ○
铝电解电容
○ ○ -
引脚元件 ○
SOT
× × -
— ○
微调电容
× × -
— ○
网络电阻
× × -
— ○
SOP
○ ○ -
引脚元件 ○
HSOP
○ ○ -
引脚元件 ○
SOJ
○ ○ -
引脚元件 ○
QFP
○ ○ -
引脚元件 ○
GaAsFET
○ ○ -
引脚元件 ○
PLCC(QFJ)
○ ○ -
引脚元件 ○
PQFP(BQFP)
○ ○ -
引脚元件 ○
TSOP
○ ○ -
引脚元件 ○
TSOP2
○ ○ -
引脚元件 ○
BGA
○ ○ -
球形元件 ○
FBGA
○ ○ -
球面元件 ×
QFN
○ ○ -
引脚元件 ○
外形识别元件
○ ○ -
外形识别元件 ×
通用图像元件
○ ○ -
外形识别元件 ×
单向引脚连接器
○ ○ -
引脚元件 ○
双向引脚连接器
○ ○ -
引脚元件 ○
Z
引脚连接器
○ ○ -
引脚元件 ○
扩展引脚连接器
○ ○ -
引脚元件 ×
J
引脚插座
○ ○ -
引脚元件 ○
鸥翼形插座
○ ○ -
引脚元件 ○
带减震器的插座
○ ○ -
引脚元件 ○
插入元件
× × ○
球元件(通用图像)
○
INS
电解电容器
○ ○ ○
引脚元件
○
其它元件
× × -
— ○
※DFFP 摄像机是假定插入元件的 VCS。
EPU 使用说明书 第 4 章 制作生产程序
4-103
例 1) 连接器元件时(引脚识别) 例 2) BGA 元件时(球识别)
(1)元件类型 引脚元件时
1)
引脚间距
输入引脚之间的尺寸。
引脚间距