JM-20_EPU使用说明书.pdf - 第168页
EPU 使用说明书 第 4 章 制作生产程序 4- 11 7 8 ) 控制 对于进行图像识 别时使用的摄像机、 照明等进行设 置。通常设置为初始 值,因此无需变 更。 设置的详细情况 ,请参见「 4-3-5-2- 10 控制」 。 ※ BGA 、 FBG A 的各输入 设置范围 元件类型 设置范围 引脚间距 mm ( 球间距 ) 引脚长度 mm ( 球直径 ) 引脚数 ( 个 ) ( 球数 ) BGA 0.35-3.0 0.4-1.0 …
EPU 使用说明书 第 4 章 制作生产程序
4-116
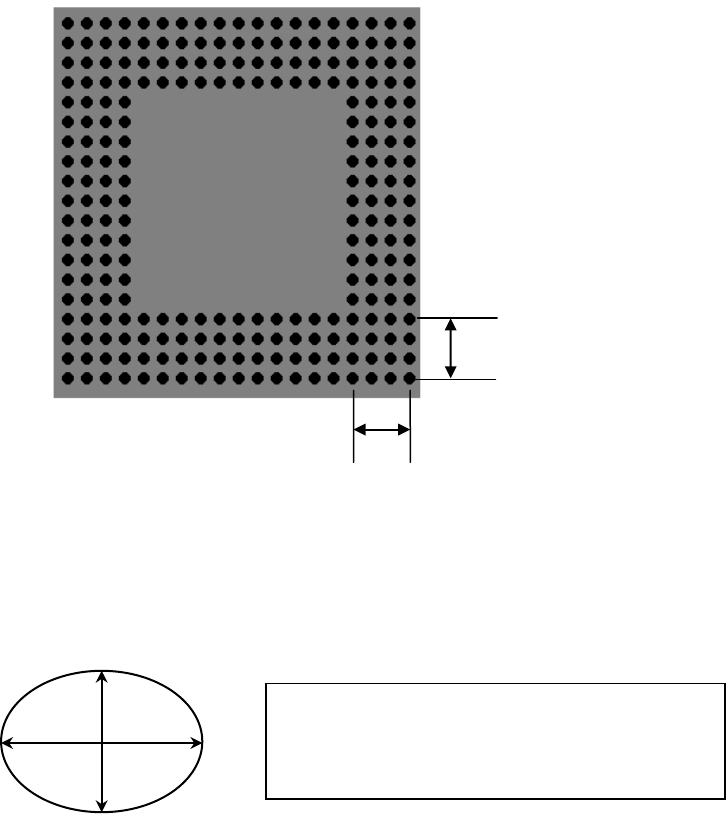
6)周边行数
设置周边型 BGA、交叉的周边型 BGA(外围多)、交叉的周边 BGA(外围少)球面图案时,要从周边
开始计算球所在行的行数,并进行设置。
除此以外设置了其他图案时,「外围行数」会显示为「0」,为无效状态。
例) 周边行数为「4」时
7)直径检查、变形检查
识别方式为「所有球面-基板」「所有球面-陶瓷」时,可设置是否进行球面检查和判定值。
●直径检查:测量各球的纵向与横向长度,无论哪一个长度超过(不足)设置值,都将被作为识别错
误。建议将检查水平值(输入值)指定在 40%以上。
●变形检查:检查球的面积。
与输入的球直径换算的球面积比较,算出来的像素值低于设置值或大于设定值时,即作为识别
错误。
建议将检查水平值(输入值)指定在 45%以上。
检查的初始值为“50”。
如果检查严格(将数字设置小些),则错误发生率就高。
4
4
H
V
将球直径的输入值设为 R 时,1-(H/R)、1-(V/R)
中的任何一个值超过(大于)或低于(小于)输入值
(%)时即为错误。
EPU 使用说明书 第 4 章 制作生产程序
4-117
8
)
控制
对于进行图像识别时使用的摄像机、照明等进行设置。通常设置为初始值,因此无需变更。
设置的详细情况,请参见「4-3-5-2-10 控制」。
※BGA、FBGA 的各输入设置范围
元件类型
设置范围
引脚间距mm
(
球间距
)
引脚长度mm
(
球直径
)
引脚数(个)
(
球数
)
BGA
0.35-3.0
0.4-1.0
4-51
FBGA
0.25-3.0
0.1-0.63
4-51
(注 1) 引脚 (球)间距:54mm 视角的 VCS 可用于“引脚 0.4~2.54mm”,“球 1.0~3.0mm”,
27mm 视角的 VCS 可用于“引脚 0.2~2.54mm”, “球 0.25~2.0mm”。
(注 2) 引脚长度 (球直径):54mm 视角的标准 VCS 可用于引脚长 0.4~1.0mm,27mm 视角的 VCS
可用于引脚长度为 0.1~0.63mm。
(注 3) 交错配置型 BGA 的最大值限定为 25。
(注 4) 陶瓷检查精度不在保证范围内。
(注 5) 焊锡球与焊锡球安装基板部分的对比度不明显时,与焊锡球直径相同的图案被连线,导致球独
立而无法识别时,在焊锡球安装基板部分上存在与焊锡球直径类似的穿孔时,不在该范围内。
EPU 使用说明书 第 4 章 制作生产程序
4-118
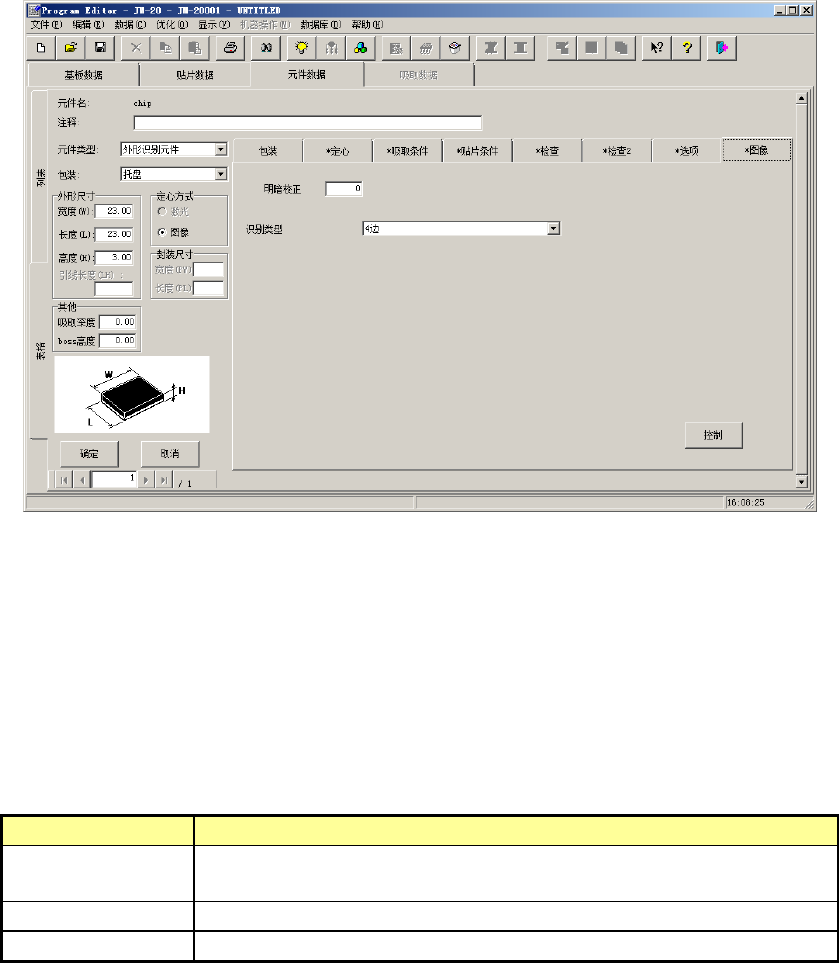
(3
)
元件类型 外形识别元件时
支持外形识别的元件为接近长方形或正方形的元件。
构成其外形的边缘必须在 0.3mm
以上
。
1)
明暗校正
设置外形识别元件识别时的临界值(阈值)。
初始值设为“0”,未能正常进行识别时,请在“-127~127”之间进行调整。
请进行调整:元件发暗而导致识别错误时,请降低数值(将全体调亮),背景 (引脚、球以外的部分)
能看清时,请升高数值(将全体调暗)。
2)
识别
选择项目
识别方式
4 边
根据四边形的
4
边来识别的方式。
对无角的四边形有效。
4
角
根据四边形的
4
个角来识别的方式。
重心
求得当前所拍摄物体的重心的方式
3)
控制
对于进行图像识别时使用的摄像机、照明等进行设置。通常设置为初始值,因此无需变更。
设置的详细情况,请参见「4-1-4-2-10 控制」。