JM-20_EPU使用说明书.pdf - 第149页
EPU 使用说明书 第 4 章 制作生产程序 4- 98 (5) 检测元件 插入 异常 此功能为: 元件种类 为插入 元件或 INS 电解电容器时 , 在 元件插入 动作的 Z 轴 下降中 ,从 Z 轴的 扭矩值变化发现 贴片异常,即以元件 插入时 发生错误 为生产 异常 。 将生产 程序编辑中预先 取得的 正常 时 的扭矩 率, 与生产动作时 的扭矩 率进行比较, 在扭矩率 超出 正常判定范围 时报 错。 设置项目 内容 检查 进行 …
EPU 使用说明书 第 4 章 制作生产程序
4-97
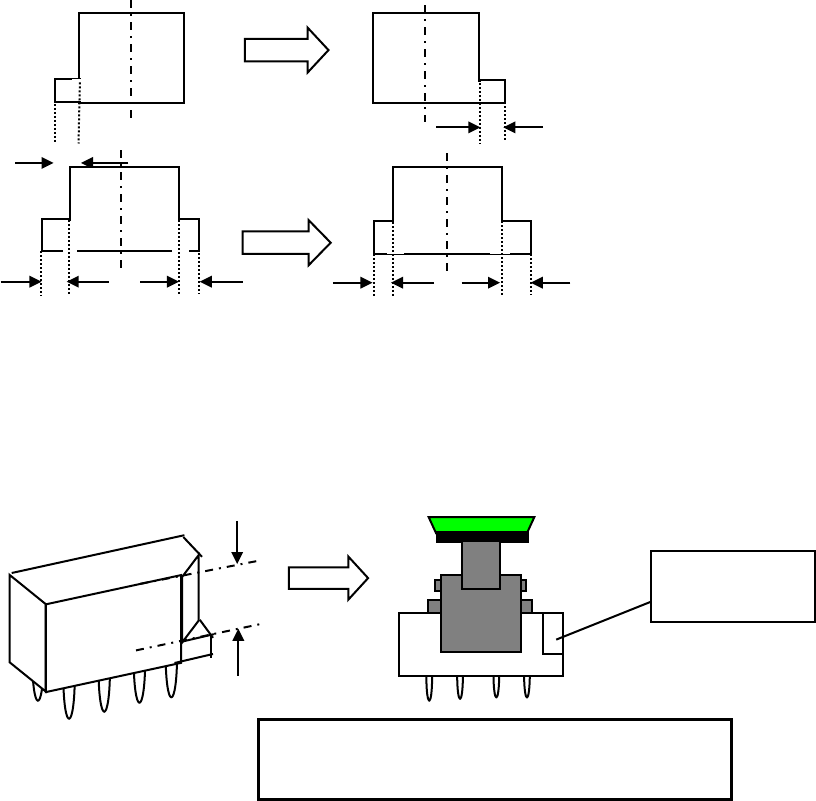
<封装判断时>
<倒角判断时>
倒角判断也与引脚判断和封装判断相同,如果倒角部分没有 0.4mm 以上的偏移量就无法判断。
3) 倒角判断中,对覆盖住倒角部分高度的元件,夹式吸嘴无法判断。
0.19mm
0.19mm
2.5mm 2.1mm 2.1mm 2.5mm
×
使贴片头旋转,识别时如果夹式吸嘴挡住了激光
器,则无法进行方向判定
×
倒角部分
EPU 使用说明书 第 4 章 制作生产程序
4-98
(5)
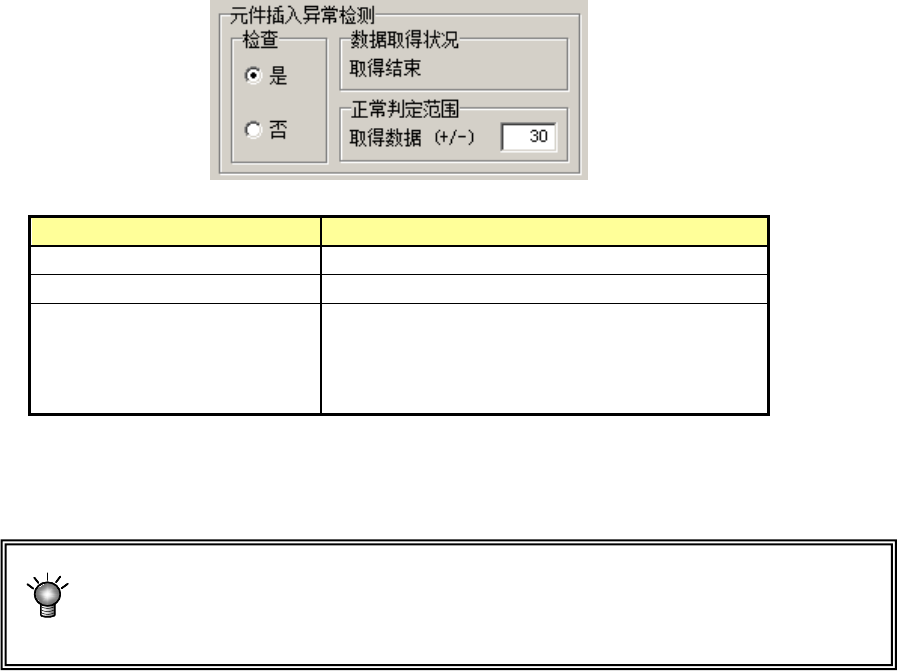
检测元件插入异常
此功能为:元件种类为插入元件或 INS 电解电容器时,在元件插入动作的 Z 轴下降中,从 Z 轴的
扭矩值变化发现贴片异常,即以元件插入时发生错误为生产异常。
将生产程序编辑中预先取得的正常时的扭矩率,与生产动作时的扭矩率进行比较,在扭矩率超出
正常判定范围时报错。
设置项目
内容
检查 进行检查是、否的设定。
数据取得状况 显示扭矩率的取得状况。显示未取得/已取得。
正常判定范围 以取得数据为基准,设定正常判定范围。在正
常时的扭矩率数值上加上指定的数值作为上限
的正常判定范围,将减去的数值作为下限的正
常判定范围。
例)正常时的扭矩率数值为 50,正常判定范围的指定数值为 30 时
当生产动作时取得的扭矩率数值低于 20 或高于 80 时,则判断为插入异常。
进行元件插入异常检测时,将 Z 轴的贴片速度设定为「高速 2」时,由于在插入元件
时,贴片速度会暂时转换为「高速」,因此生产节拍会降低一些。
EPU 使用说明书 第 4 章 制作生产程序
4-99
4-1-4-2-8 检查 3
对“设定径向供料器的供料动作 ”、“ 设定径向供料器 HMS 的元件确认”进行相关设定。
仅在元件类型为「插入元 件 」「 INS 电解电容」并且包装方式为「INS 带式 」, 选择「MRF-S」「 MRF-L」
类型时,才能设定此项。
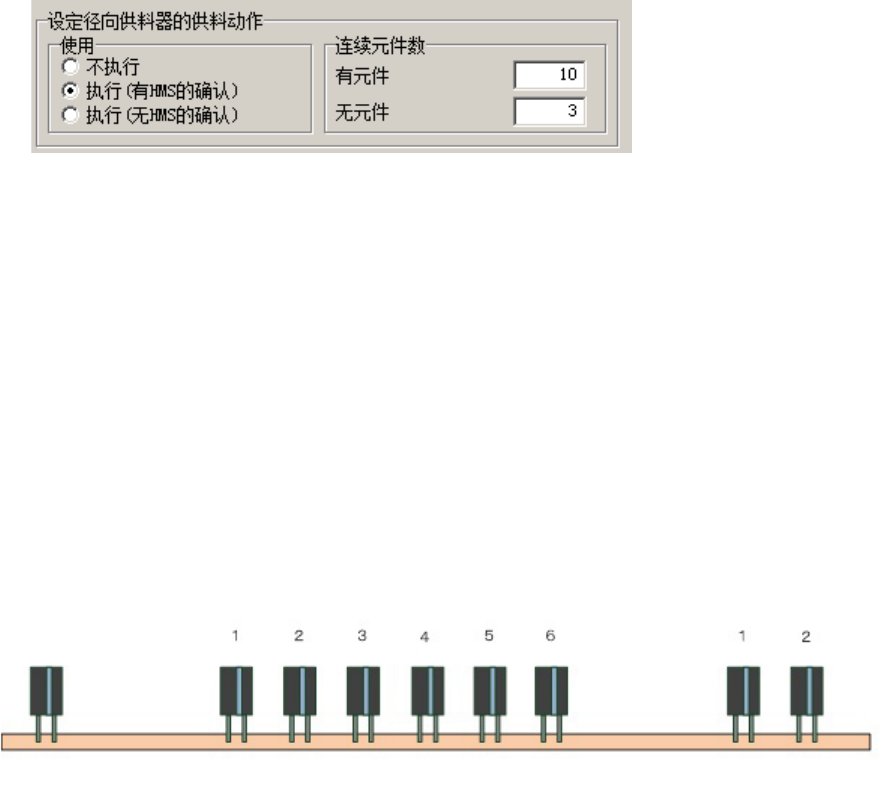
1) 设定径向供料器的供料动作
此功能是对于会定期出现缺失状态的带式元件到达缺失部位时,不进行吸取动作,通过 HMS 判
定元件有无,元件「无」时进行送料的功能。
不执行
对于没有缺失部位的带式元件、不定期存在缺失部位的元件,请选择不执行。
执行(有 HMS 的确认)
到达缺失部位后使用 HMS 进行元件有无确认,如果没有元件则进行送料,进行吸取动作。
执行(无 HMS 的确认)
到达缺失部位后使用 HMS 进行元件有无确认,如果没有元件则进行送料,进行吸取动作。如果
使用 HMS 确认连续 3 次无元件,之后将不进行 HMS 确认动作,直接进行吸取动作。
元件连续数
有元件 : 设置有元件状态连续的数量。(下图所示为 6)
无元件 : 设置无元件状态连续的数量。(下图所示为 2)
2) 设定径向供料器 HMS 的元件确认
此功能是从径向供料器吸取元件失败时,通过 HMS 检测径向供料器元件有无的功能。仅在元件
类型为「插入元件」「INS 电解电容」并且包装方式为「INS 带式」,选择「MRF-S」「 MRF-L」
类型时,才能设定此项。