编 程 手 册.pdf - 第48页
BM122 编程手册 4.1 元件程序库的设定项目 E34PCC-3 2-010-B0 4.1-3 4.1.4 [Move1]( 移动 1) 2. 1. 头 吸嘴 设定用来吸着和贴装元 件的吸嘴。 按照吸嘴名称或吸嘴数 目来指定吸嘴 。 应该在吸嘴程序库中建 立吸嘴的数据 指定吸嘴 数目的方法: 输入范围: 1 ~ 99 指定吸嘴 名称的方法: 在栏中直接输入吸嘴名 称, 或按照以 下步骤 进行。 1) 点击 <… >…
BM122
编程手册
4.1 元件程序库的设定项目
E34PCC-32-010-B0
4.1-2
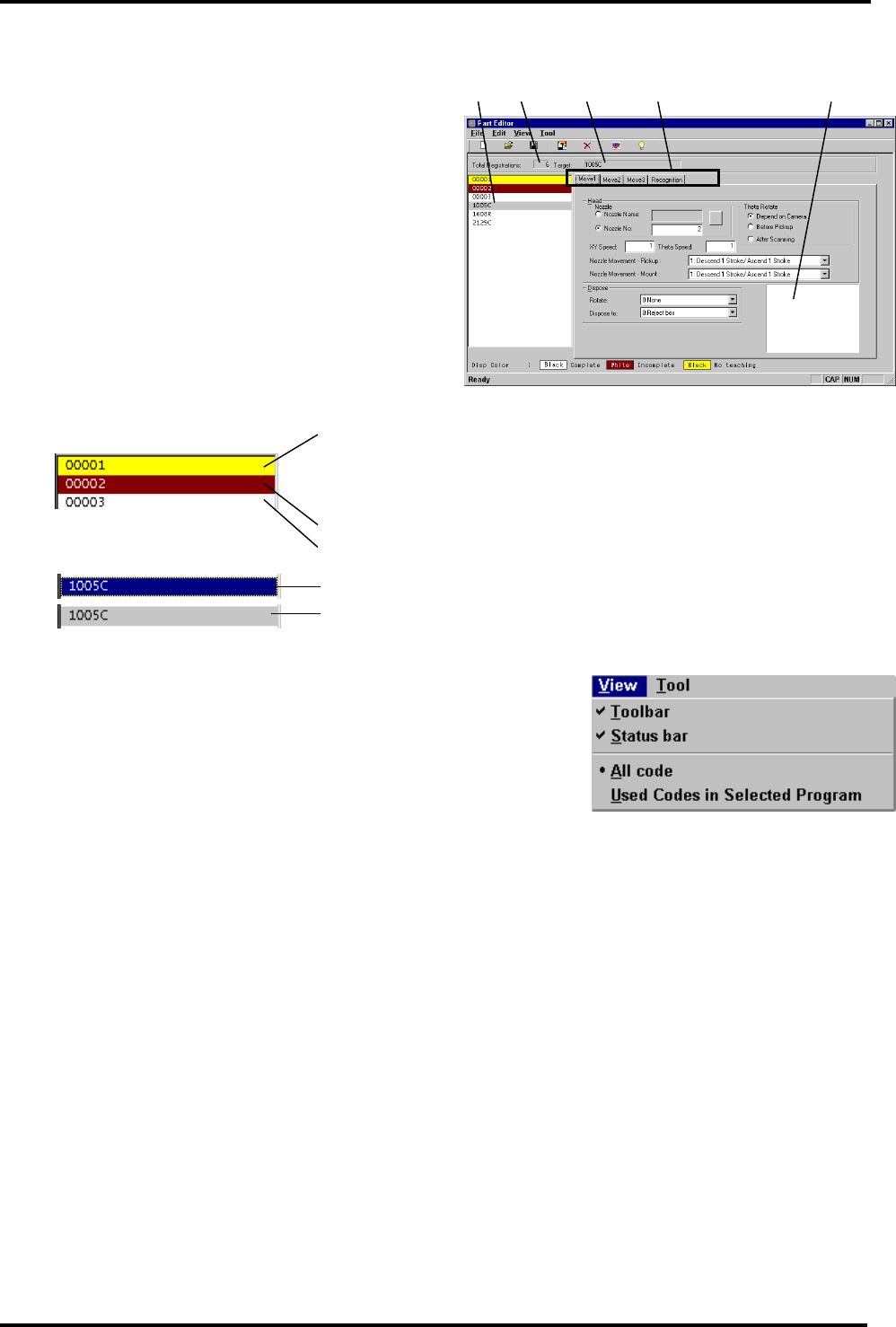
4.1.3 标记编辑器窗口
1.
1. 全部登录数
显示已存在的元件代码数目。
最多可登录 1000 个元件。
2. 目标对象
表示目前被编辑的数据代码,其在标记代码列表
中指出。
3. 元件代码列表框
显示已登录的代码列表。
通过颜色可以分辨数据的状态。
黑色字母/黄色背景:未完成的示教数据必须是二进制数据。
该数据正等待示教,即元件类型 100 中的数据作为新类型,
而元件类型 1-10 中的数据作为旧类型
白色字母/深红色的背景:未完成的编辑
黑色字母/白色背景:已完成的编辑
当前选择
白色字母/深蓝色的背景: 代码已选择,但没有打开。
黑色字母/灰色背景: 代码已选择且已打开。
在’View’(查看)菜单中,选择’All Code’(全部代码) 或’Use Codes
in Selected Program’(使用选定程序中的代码)以指定将要显示
的数据。
当前选中的项高亮度显示。
=提示=
选择一个标记后,按下“回车”来编辑该标记的数据
在数据编辑过程中,同时按下“Shift + Enter ”键以返回标记代码列表。
4. 选项卡
<MOVE1>(移动 1) , <MOVE2>(移动 2) <MOVE3>(移动 3): 按照元件来设定机器的操作。
[Recognition](识别):按照元件来设定识别数据。
5. 登录时的指导信息
当存在相关的图片时,显示其中的一张。
同时也会在状态栏显示输入范围的信息。
1. 2. 3. 4. 5.
BM122
编程手册
4.1 元件程序库的设定项目
E34PCC-32-010-B0
4.1-3
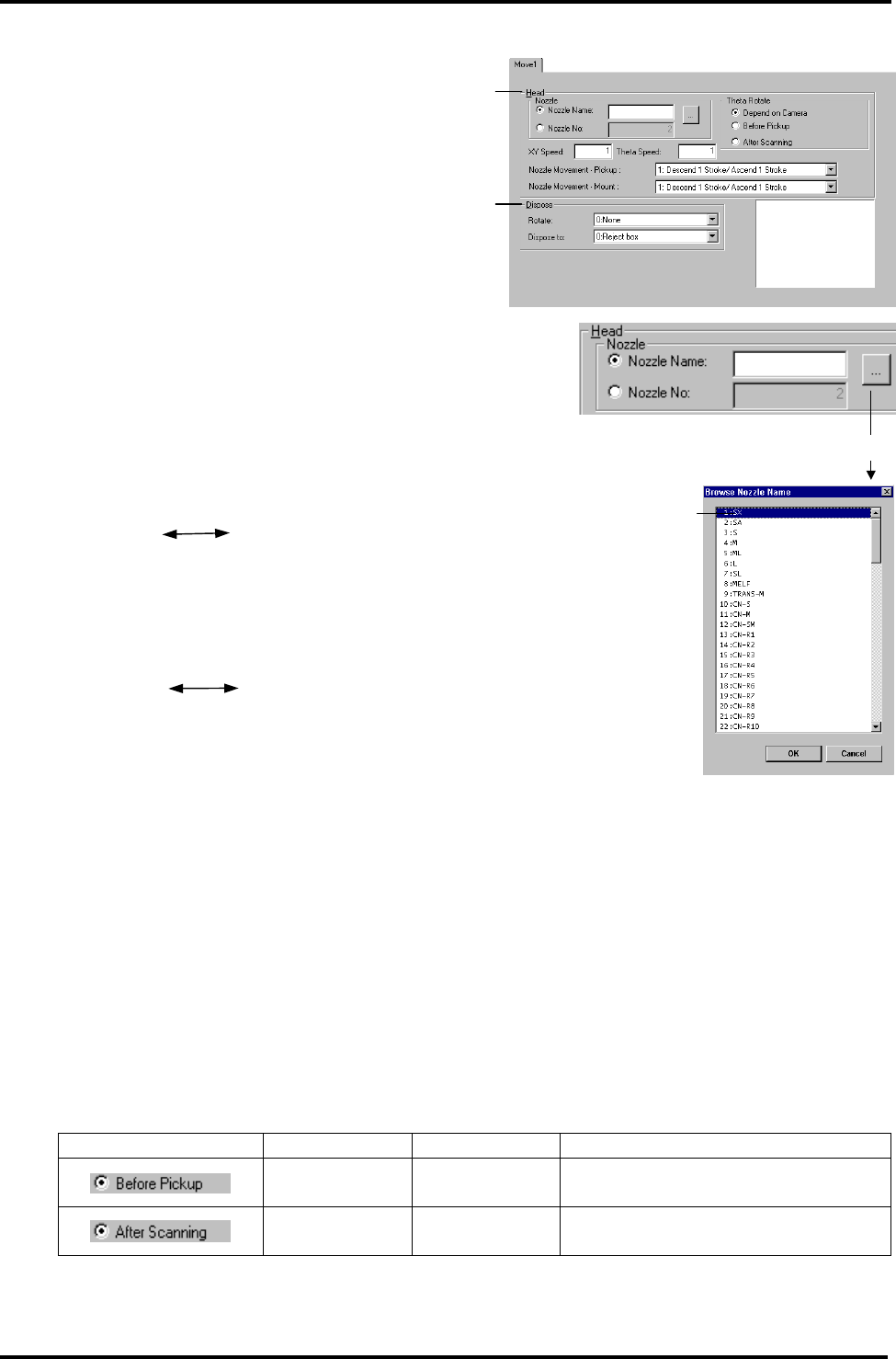
4.1.4 [Move1](移动 1)
2.
1. 头
吸嘴
设定用来吸着和贴装元件的吸嘴。
按照吸嘴名称或吸嘴数目来指定吸嘴。
应该在吸嘴程序库中建立吸嘴的数据
指定吸嘴数目的方法:
输入范围:1 ~ 99
指定吸嘴名称的方法:
在栏中直接输入吸嘴名称,或按照以下步骤
进行。
1) 点击 <…> 来打开对话框。
2) 选择想要的吸嘴后点击<OK>.
=提示=
在使用“LA”标记的吸嘴时,请选择吸嘴名为“L”,吸嘴号
为 6 的吸嘴。
XY 轴的速度
设定 X 轴和 Y 轴的移动速度。
1:高 8:低
通常,在 1~ 5 之间选择一个数值。
特殊元件会用到 6 ~ 8。
θ的速度
设定转动吸嘴的速度。
1:高 4:低
θ的旋转
确定是否在吸着元件前或识别之后转动θ轴。
取决于照相机 (通常使用该模式)
通过照相机来转换操作以识别元件。
标准情况 固定照相机 (10): 识别之后旋转θ轴。
固定照相机 (
22 / 36): 吸着之前旋转θ轴。
强制吸着之前
在吸着元件之前旋转θ轴,并在贴装的角度进行识别。
识别之后,θ轴仅在作校正时旋转。
适用于区分精度的情况。
强制识别之后
识别之后,按照贴装的角度旋转θ轴。
适用于进行同步吸着的各种情况,例如将优先序赋予节拍时间。
=提示=
使用较大的元件时,选择 “扫描之后”会降低贴装的准确度。
贴装精度 (*1) 节拍时间 (*1) 推荐的元件 (*2)
高 慢
由固定照相机(10)识别的元件,贴装
时需要高精度。
低 快
由固定照相机(22 / 36) 识别的元
件,贴装时不需要高精度。
(*1): 通过比较“吸着之前”和“识别之后”这两种模式,可以估计贴装精度和节拍时间。
(*2): 对于以上所列元件之外的元件,建议采用“取决于照相机”模式。
2.
1.
2)
1)
BM122
编程手册
4.1 元件程序库的设定项目
E34PCC-32-010-B0
4.1-4
回收传送带
X
吸嘴的移动图案
指出在吸着元件时,头是如何升高和降低的。
1: 下降 1 行程,上升
1 行程 (默认设置)
下降时,头以“XY 轴速度”设定的速度移动。
(贴装元件的最低速度)
上升时,头高速移动
2: 下降 2 行程, 上升
1 行程
下降时,头进行步骤 2 移动;上升时与 1 相同。
3: 下降 1 行程, 上升
2 行程
下降时与 1 相同,上升时,头进行步骤 2 的移动。
4: 下降 2 行程, 上升
2 行程
下降或上升时,都进行步骤 2 的移动。
=提示=
在降低吸嘴时,如果受振动的影响元件容易损坏,请选择下降 2 行程。
如果贴装之后元件的拿回发生时,请选择上升 2 行程。
这种情况下的节拍时间较慢。
吸嘴的移动图案
在贴装元件时,指定头是如何降低和升高的。
1: 下降 1 行程,上升 1
进程 (默认设定)
下降时,头以“XY 轴速度”指定的速度移动(元件贴装的最低速
度)。 上升时,头高速移动。
2: 下降 2 行程,上升 1
进程
下降时,头进行步骤 2 的移动,上升时,头高速移动。
3: 下降 1 行程,上升 2
进程
下降时,头高速移动; 上升时,头进行步骤 2 的移动。
4: 下降 2 行程,上升 2行程 下降和上升时,头都进行步骤 2 的移动。
=提示=
降低吸嘴时,如果受振动的影响元件容易损坏,请选择下降 2 行程。
贴装之后,如果吸嘴取回一个元件,请选择上升 2 行程。
这种情况下节拍时间较慢。
用 S 吸嘴或 M 吸嘴对基板与元件之间接触面积小的元件进行贴装时,最好将贴装动作模式设定为“3:
1 段下降、2 段上升”。
示例)用 M 吸嘴对 TSOP、铝电解电容器进行贴装时
用 S 吸嘴对 2 管脚二极管进行贴装时
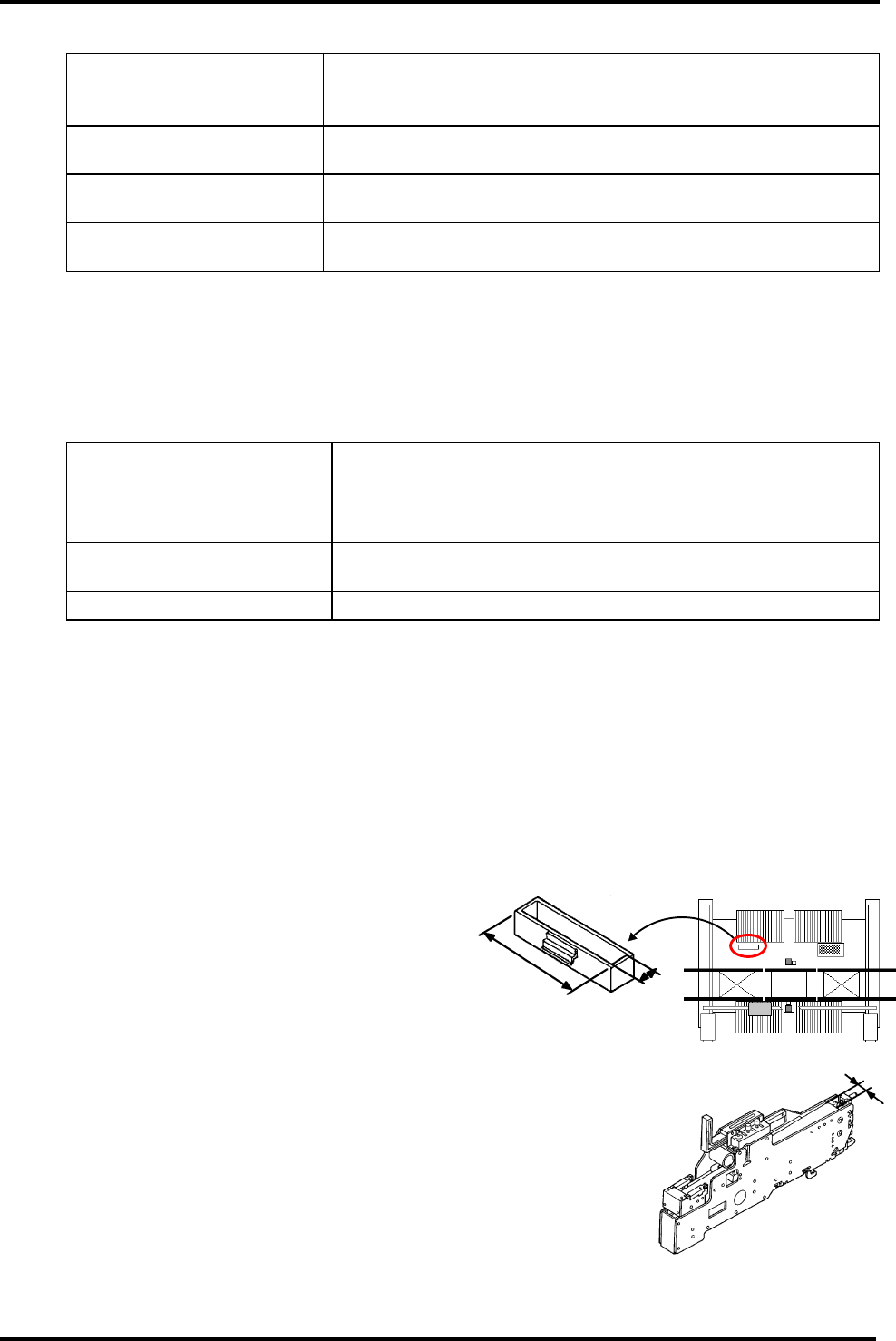
2. 废弃
方向
在处置要丢弃的元件时设定角度。
根据元件大小和处置方法选择需要的角度。
0: 0° 1: 90°
类别
为要丢弃元件指定丢弃地点。
0: 废料槽
1: 传送带 (回收传送带)
=提示=
X 193 mm
废料槽
Y 53 mm