IS620P系列伺服用户手册.pdf - 第113页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 1 13 - 6.1.3 转矩控制模式 启动过程 故障现象 原因 确认方法 接通控制电源 (L1C L2C) 主电源 (L1 L2) (R S T) 数码管不亮或 不显示 “ rdy ” 1 、控制电源电压故障 ◆ 拔下 CN1 、 CN2 、 CN3 、 CN4 后, 故障依然存在。 ◆ 测量 (L1C 、 L2C) 之间的交流电压 。 2 、主电源电压故障 ◆…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 112 -
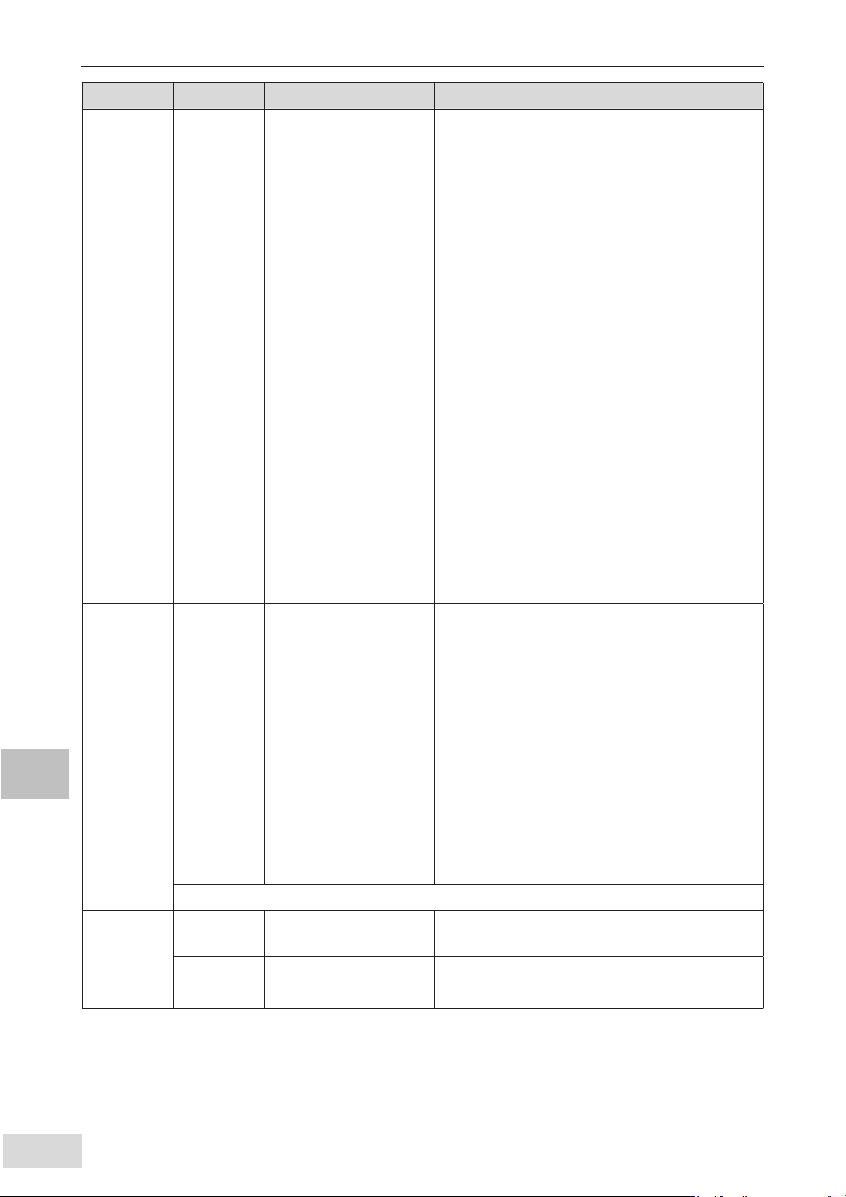
启动过程 故障现象 原因 确认方法
输入速度指令
伺服电机不
旋转或转速
不正确
速度指令 (H0B-01) 为 0
◆ AI 接线错误
选用模拟量输入指令时,首先查看 AI 模拟量输入
通道选择是否正确,然后查看 AI 端子接线是否正
确,请参考第 3 章。
◆ 速度指令选择错误
查看 H06-02 是否设置正确。
◆ 未输入速度指令或速度指令异常
1、选用模拟量输入指令时,首先查看 H03 组 AI
相关参数设置是否正确;然后检查外部信号源输
入电压信号是否正确,可用示波器观测或通过
H0B-21 或 H0B-22 读取;
2、数字给定时,查看 H06-03 是否正确;
3、多段速度指令给定时,查看 H12 组参数是否
设置正确;
4、通讯给定时,查看 H31-09 是否正确;
5、点动速度指令给定时,查看 H06-04 是否正确,
是否已设置 DI 功能 18 和 19,及对应端子逻辑是
否有效;
6、查看加减速时间 H06-05 和 H06-06 设置是否
正确;
7、零位固定功能是否被误启用,即查看 DI 功能
12 是否误配置,以及相应 DI 端子有效逻辑是否
正确。
输入速度指令
伺服电机反转
速度指令 (H0B-01)
为负数
◆ 选用模拟量输入指令时,查看输入信号正负极
性是否反向;
◆ 数字给定时,查看 H06-03 是否小于 0;
◆ 多段速度指令给定时,查看 H12 组每组速度
指令的正负;
◆ 通讯给定时,查看 H31-09 是否小于 0;
◆ 点动速度指令给定时,查看 H06-04 数值、DI
功能 18、19 的有效逻辑与预计转向是否匹配;
◆ 查看是否已设置 DI 功能 26(FunIN.26:
SpdDirSel,速度指令方向设置 ) 及对应端子
逻辑是否有效;
◆ 查看 H02-02 参数是否设置错误。
■ 排除上述故障后,伺服电机能旋转。
低速旋转不
平稳
低速旋转时
速度不稳定
增益设置不合理 ◆ 进行自动增益调整。
电机轴左右
振动
负载转动惯量比
(H08-15) 太大
◆ 若可安全运行,则重新进行惯量辨识;
◆ 进行自动增益调整。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 113 -
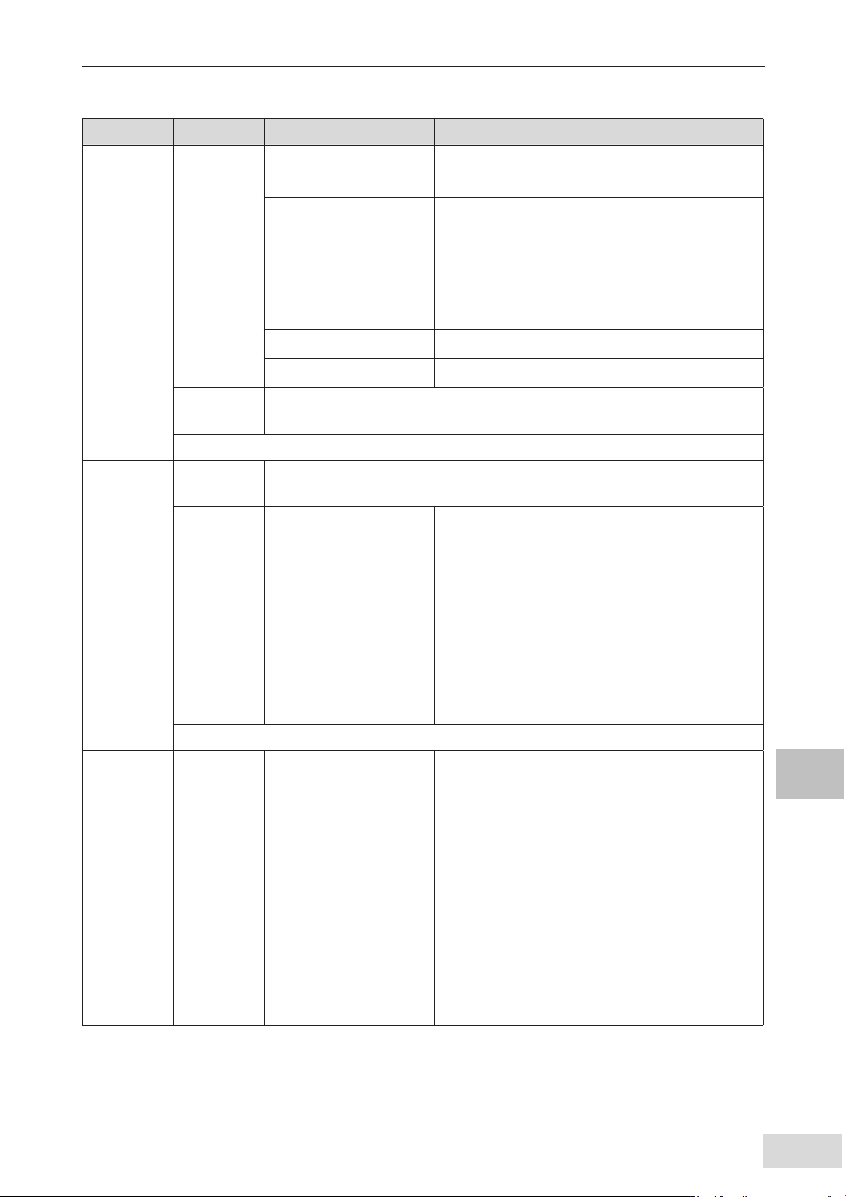
6.1.3 转矩控制模式
启动过程 故障现象 原因 确认方法
接通控制电源
(L1C L2C)
主电源
(L1 L2)
(R S T)
数码管不亮或
不显示“rdy”
1、控制电源电压故障
◆ 拔下CN1、CN2、CN3、CN4 后,故障依然存在。
◆ 测量 (L1C、L2C) 之间的交流电压 。
2、主电源电压故障
◆ 单相 220V 电源机型测量 (L1、L2) 之间的交
流电压。主电源直流母线电压幅值 (P、间电压 )
低于 200V 数码管显示“nrd”。
◆ 三相 220V/380V 电源机型测量 (R、S、T) 之
间的交流电压。主电源直流母线电压幅值 (P、
间电压 ) 低于 460V 数码管显示“nrd”。
3、烧录程序端子被短接 ◆ 检查烧录程序的端子,确认是否被短接。
4、伺服驱动器故障 -
面板显示
“Er.xxx”
参考 6.2 章节,查找原因,排除故障。
■ 排除上述故障后,面板应显示“rdy”。
伺服使能信号
置为有效
(S-ON 为
ON)
面板显示
“Er.xxx”
参考 6.2 章节,查找原因,排除故障。
伺服电机的
轴处于自由
运行状态
伺服使能信号无效
◆ 将面板切换到伺服状态显示,查看面板是否显
示为“Rdy”,而不是“run”。
◆ 查看 H03 组和 H17 组,是否设置伺服使能信
号 (DI 功能 1:S-ON)。若已设置,则查看对
应端子逻辑是否有效;若未设置,则进行设置,
并使端子逻辑有效。可参考第 8 章“H03 组:
端子输入参数”设置方法。
◆ 若 H03 组已设置伺服使能信号,且对应端子
逻辑有效,但面板依然显示“rdy”,则检查
该 DI 端子接线是否正确,可参考第 4 章。
■ 排除上述故障后,面板应显示“run”。
输入转矩指令
伺服电机不
旋转
内部转矩指令 (H0B-02)
为 0
◆ AI 接线错误
选用模拟量输入指令时,查看 AI 端子接线是否正
确,请参考第 4 章。
◆ 转矩指令选择错误
查看 H07-02 是否设置正确。
◆ 未输入转矩指令
1、选用模拟量输入指令时,首先查看 H03 组 AI
相关参数设置是否正确;然后查看外部信号源输
入电压信号是否正确,可用示波器观测或通过
H0B-21 或 H0B-22 读取;
2、数字给定时,查看 H07-03 是否为 0;
3、通讯给定时,查看 H31-11 是否为 0
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 114 -
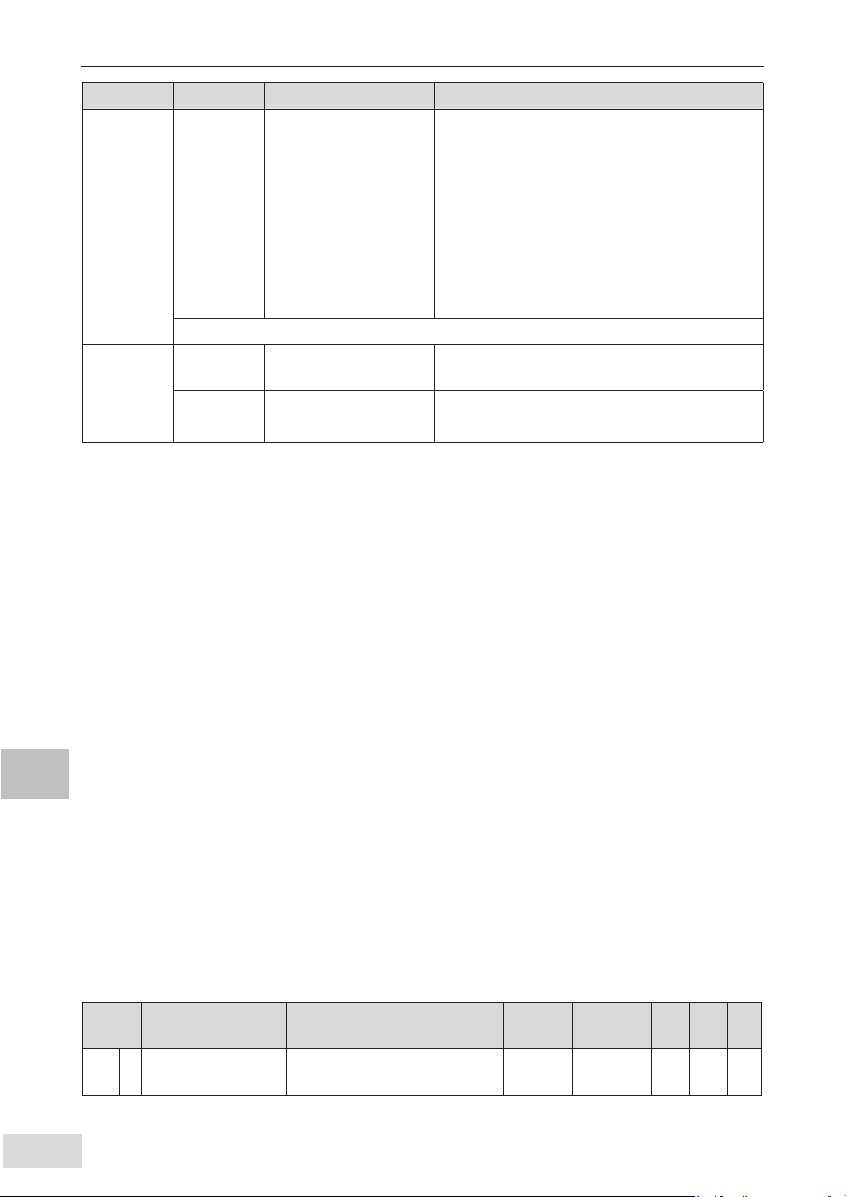
启动过程 故障现象 原因 确认方法
输入转矩指令
伺服电机反转
内部转矩指令 (H0B-02)
为负数
◆ 选用模拟量输入指令时,外部信号源输入电压
极性是否反向,可用示波器或通过 H0B-21 或
H0B-22 查看;
◆ 数字给定时,查看 H07-03 是否小于 0;
◆ 通讯给定时,查看 H31-11 是否小于 0
◆ 查看是否已设置 DI 功能 25(FunIN.25:
ToqDirSel,转矩指令方向设置 ) 及对应端子
逻辑是否有效;
◆ 查看 H02-02 参数是否设置错误。
■ 排除上述故障后,伺服电机能旋转。
低速旋转不
平稳
低速旋转时
速度不稳定
增益设置不合理 ◆ 进行自动增益调整。
电机轴左右
振动
负载转动惯量比
(H08-15) 太大
◆ 若可安全运行,则重新进行惯量辨识;
◆ 进行自动增益调整。
6.2 运行时的故障和警告处理
6.2.1 故障和警告代码表
1) 故障和警告分类
伺服驱动器的故障和警告按严重程度分级,可分为三级,第 1 类、第 2 类、第 3 类,严重等级:
第 1 类 > 第 2 类 > 第 3 类,具体分类如下:
● 第 1 类 ( 简称 NO.1) 不可复位故障;
● 第 1 类 ( 简称 NO.1) 可复位故障;
● 第 2 类 ( 简称 NO.2) 可复位故障;
● 第 3 类 ( 简称 NO.3) 可复位警告。
“可复位”是指通过给出“复位信号”使面板停止故障显示状态。
具体操作:设置参数 H0D-01=1 ( 故障复位 ) 或者使用 DI 功能 2(FunIN.2: ALM-RST,故障和警
告复位 ) 且置为逻辑有效,可使面板停止故障显示。
NO.1、NO.2 可复位故障的复位方法:先关闭伺服使能信号 (S-ON 置为 OFF),然后置 H0D-
01=1 或使用 DI 功能 2。
NO.3 可复位警告的复位方法:置 H0D-01=1 或使用 DI 功能 2。
注:
■ 对于一些故障或警告,必须通过更改设置,将产生的原因排除后,才可复位,但复位不代表更改生
效。对于需要重新上控制电 (L1C、L2C) 才生效的更改,必须重新上控制电;对于需要停机才生效
的更改,必须关闭伺服使能。更改生效后,伺服驱动器才能正常运行。
☆关联功能码:
功能码 名称 设定范围 单位 出厂设定
设定
方式
生效
时间
相关
模式
H0D 01 故障复位
0- 无操作
1- 故障和警告复位
- 0
停机
设定
立即
生效
-