IS620P系列伺服用户手册.pdf - 第62页
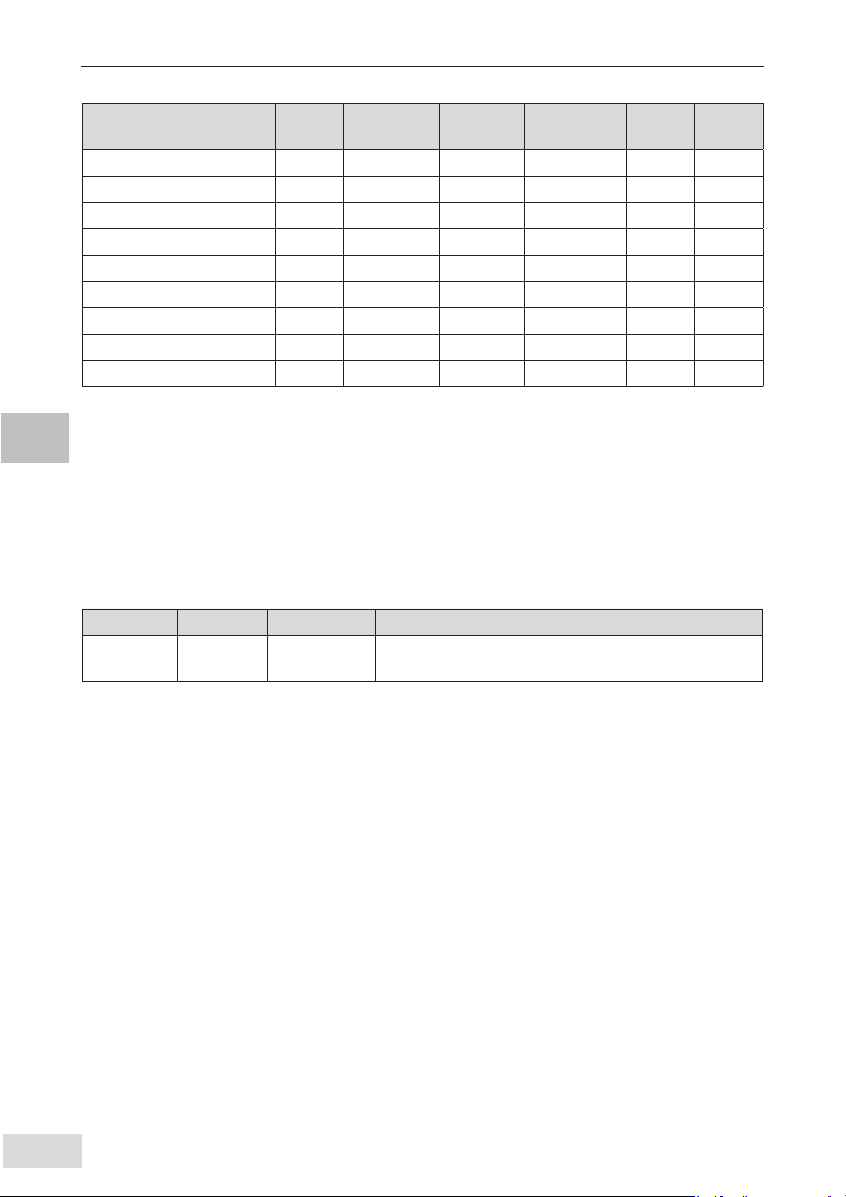
3 第 3 章 伺服驱动器与电机的连接说明 IS620P 系列伺服用户手册简易版 - 62 - 表 3-24 抱闸参数表 电机型号 保持转矩 (Nm) 供电电压 (V) ± 10% 电阻 (Ohm) ± 7% 供电电流区间 (A) 脱离时间 (ms) 吸合时间 (ms) ISMH1-10B 0.32 24 96 0.23~0.27 10 30 ISMH1-20B/40B 1.3 24 82.3 0.25~0.34 20 50 ISMH1…
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 61 -
请务必将上位装置的 5V 地与驱动器的 GND 连接,并采用双绞屏蔽线以降低噪声干扰。
伺服驱动器内部光耦输出电路最大允许电压、电流容量如下:
● 电压:DC30V( 最大 )
● 电流:DC50mA( 最大 )
3.3.5 抱闸配线
抱闸是在伺服驱动器处于非运行状态时,防止伺服电机轴运动,使电机保持位置锁定,以使机械
的运动部分不会因为自重或外力移动的机构。
外力
伺服电机
(内置抱闸)
防止工作台因外力移动
伺服电机
(内置抱闸)
防止电源 OFF 时
因自身重量移动
图 3-14 抱闸应用示意图
注:
■ 内置于伺服电机中的抱闸机构是非通电动作型的固定专用机构,不可用于制动用途,仅在使伺服电机保
持停止状态时使用。
■ 抱闸线圈无极性。
■ 伺服电机停机后,应关闭伺服使能 (SON)。
■ 内置抱闸的电机运转时,抱闸可能会发出咔嚓声,功能上并无影响。
■ 抱闸线圈通电时 ( 抱闸开放状态 ),在轴端等部位可能发生磁通泄漏。在电机附近使用磁传感器等仪器时,
请注意。
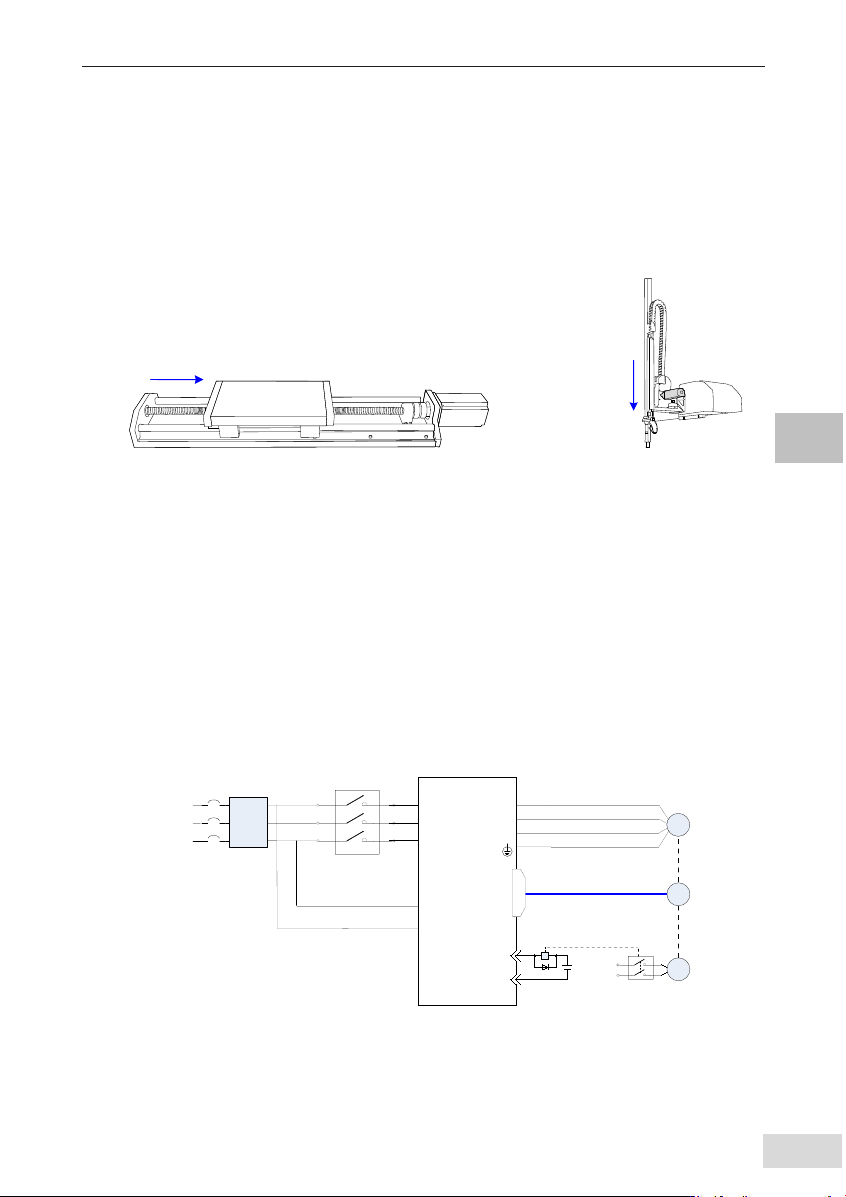
a) 抱闸接线
抱闸输入信号的连接没有极性,需要用户准备 24V 电源。抱闸信号 BK 和抱闸电源的标准连
线实例如下:
抱闸控制继电器
伺服驱动器
CN1
BK-RY
+24V
DO5+( BK+)
DO5-( BK-)
+24V
(抱闸电源)
编码器
抱闸
电机
噪音
滤波器
L1C
L2C
三相220Vac
380Vac
R
S
T
U
V
W
M
CN2
PG
BK
图 3-15 抱闸配线图
抱闸配线注意事项:
● 电机抱闸线缆长度需要充分考虑线缆电阻导致的压降,抱闸工作需要保证输入电压至少
21.6V。我司电机的抱闸参数具体见下表:
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 62 -
表 3-24 抱闸参数表
电机型号
保持转矩
(Nm)
供电电压 (V)
±10%
电阻 (Ohm)
±7%
供电电流区间
(A)
脱离时间
(ms)
吸合时间
(ms)
ISMH1-10B 0.32 24 96 0.23~0.27 10 30
ISMH1-20B/40B 1.3 24 82.3 0.25~0.34 20 50
ISMH1-75B 2.39 24 50.1 0.40~0.57 25 60
ISMH2-10C/15C/20C/25C 8 24 25 0.81~1.14 30 90
ISMH2-30C/40C/50C 16 24 21.3 0.95~1.33 60 120
ISMH3-85B/13C/18C 16 24 21.3 0.95~1.33 60 120
ISMH3-29C/ 44C/55C/75C 48 24 13.7 1.47~2.07 100 230
ISMH4-40B 1.3 24 82.3 0.25~0.34 20 50
ISMH4-75B 2.39 24 50.1 0.40~0.57 25 60
● 抱闸最好不要与其他用电器共用电源,防止因为其他用电器的工作导致电压或者电流降
低最终导致抱闸误动作。
● 推荐用 0.5mm
2
以上线缆。
b) 抱闸软件设置
对于带抱闸的伺服电机,必须将伺服驱动器的 1 个 DO 端子配置为功能 9(FunOUT.9:BK,
抱闸输出 ),并确定 DO 端子有效逻辑。
☆关联功能编号:
编码 名称 功能名 功能
FunOUT.9 BK 抱闸输出
无效,抱闸电源接通,抱闸动作,电机处于位置锁定状态;
有效,抱闸电源断开,抱闸解除,电机可旋转;
根据伺服驱动器当前状态,抱闸机构的工作时序可分为伺服驱动器正常状态抱闸时序和伺服
驱动器故障状态抱闸时序。
c) 伺服驱动器正常状态抱闸时序
正常状态的抱闸时序可分为电机静止和电机旋转两种情况:
● 静止:电机实际转速低于 20rpm;
● 旋转:电机实际转速达到 20rpm 及以上。
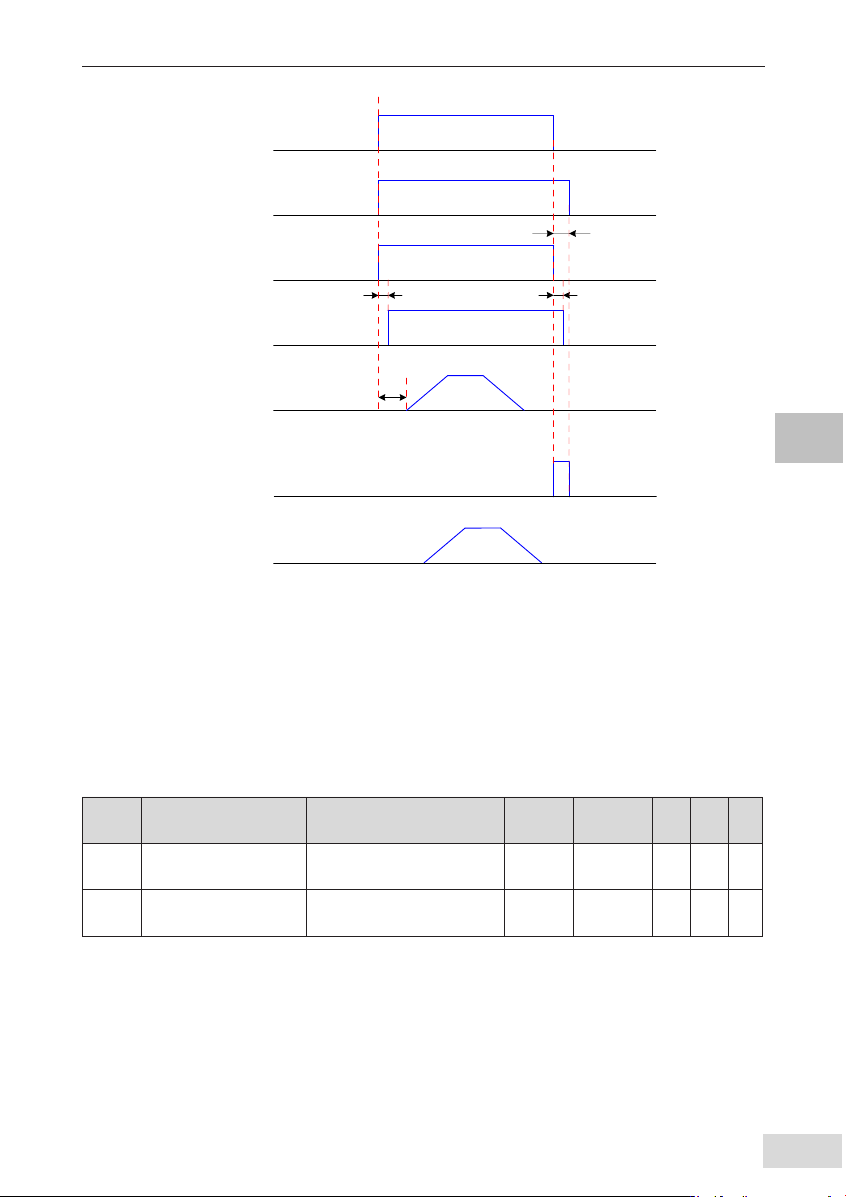
① 伺服电机静止时的抱闸时序
伺服使能由 ON 转为 OFF 时,若当前电机速度低于 20rpm,则驱动器按静止抱闸时序动作。
■ 抱闸输出由 OFF 置为 ON 后,在 H0209 时间内,请勿输入位置 / 速度 / 转矩指令,否则会造成指
令丢失或运行错误。
■ 用于垂直轴时,机械运动部的自重或外力可能会引起机械轻微移动。伺服电机静止情况时,发生伺
服使能 OFF,抱闸输出立刻变为 OFF,但在 H0210 时间内,电机仍然处于通电状态,防止机械
运动部由于自重或外力作用移动。
注:
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 63 -
ON
OFF OFF
伺服使能
(S-ON)
抱闸输出
(BK)
OFF OFF
H02-09
位置/速度/
转矩指令
电机速度
H02-10
ON
OFF OFF
电机通电
ON
*1
OFF(抱闸有效)
OFF
抱闸接触部
*2
*2
*3
*4
ON(抱闸无效)
零速停机
OFF
ON
OFF
图 3-16 电机静止时抱闸时序图
注释:
*1、伺服使能 ON 时,抱闸输出被置为 ON,同时电机进入通电状态;
*2、抱闸接触部动作的延迟时间请参考电机相关规格,详见第 2 章;
*3、从抱闸输出设为 ON 到输入指令,请间隔 H02-09 时间以上;
*4、伺服电机静止情况 ( 电机转速低于 20rpm) 下,伺服使能 OFF 时,抱闸输出同时被置为
OFF,通过 H02-10 可以设定抱闸输出 OFF 后,电机进入非通电状态的延时。
☆关联功能码:
功能码 名称 设定范围 单位 出厂设定
生效
时间
设定
方式
相关
模式
H02-09
抱闸输出 ON 至指令
接收延时
0~500 ms 250
立即
生效
运行
设定
PS
H02-10
静止状态 , 抱闸输出
OFF 至电机不通电延时
1~1000 ms 150
立即
生效
运行
设定
PS
② 伺服电机旋转时的抱闸时序
伺服使能由 ON 转为 OFF 时,若当前电机速度大于等于 20rpm,则驱动器按旋转抱闸时序动作。
注意:
■ 伺服使能由 OFF 置为 ON 时,在 H02-09 时间内,请勿输入位置 / 速度 / 转矩指令,否则会造成指令
丢失或运行错误;
■ 伺服电机旋转时,发生伺服使能 OFF,伺服电机进入零速停机状态,但抱闸输出需满足以下任一条