IS620P系列伺服用户手册.pdf - 第148页
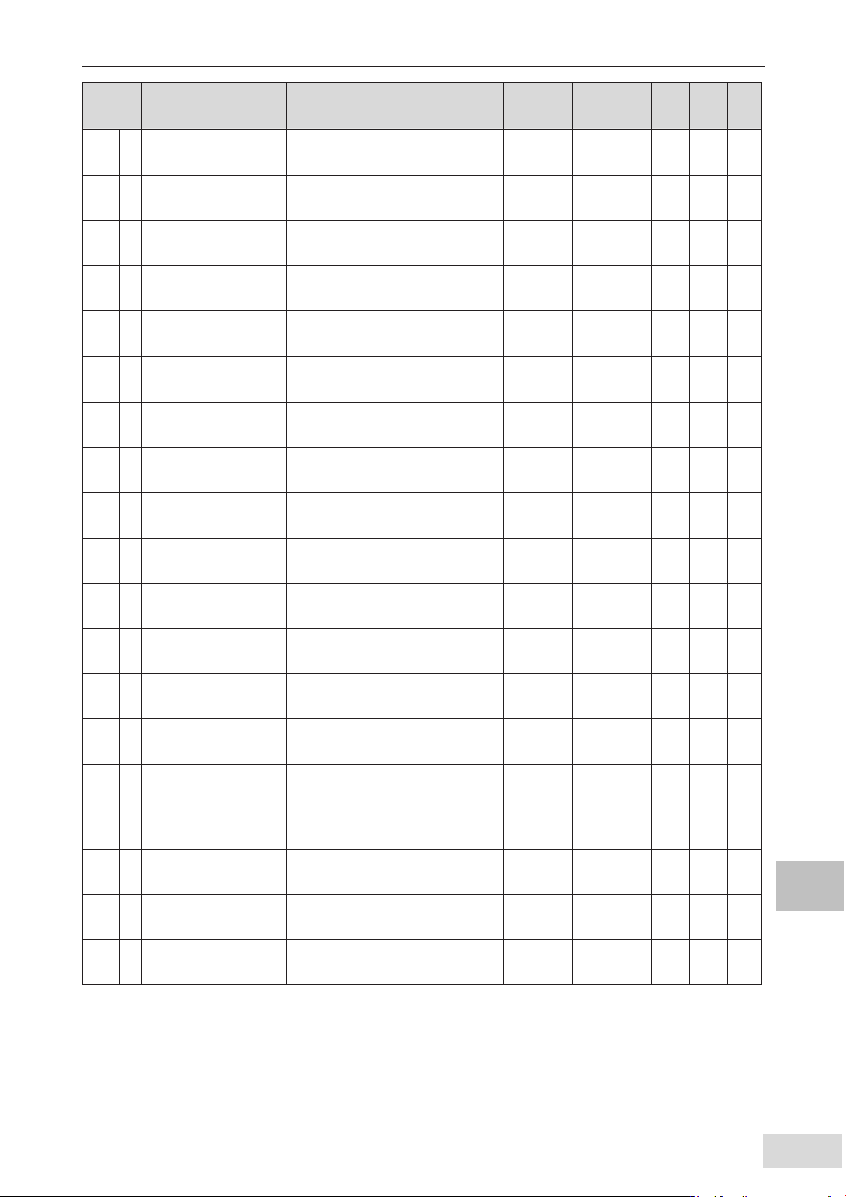
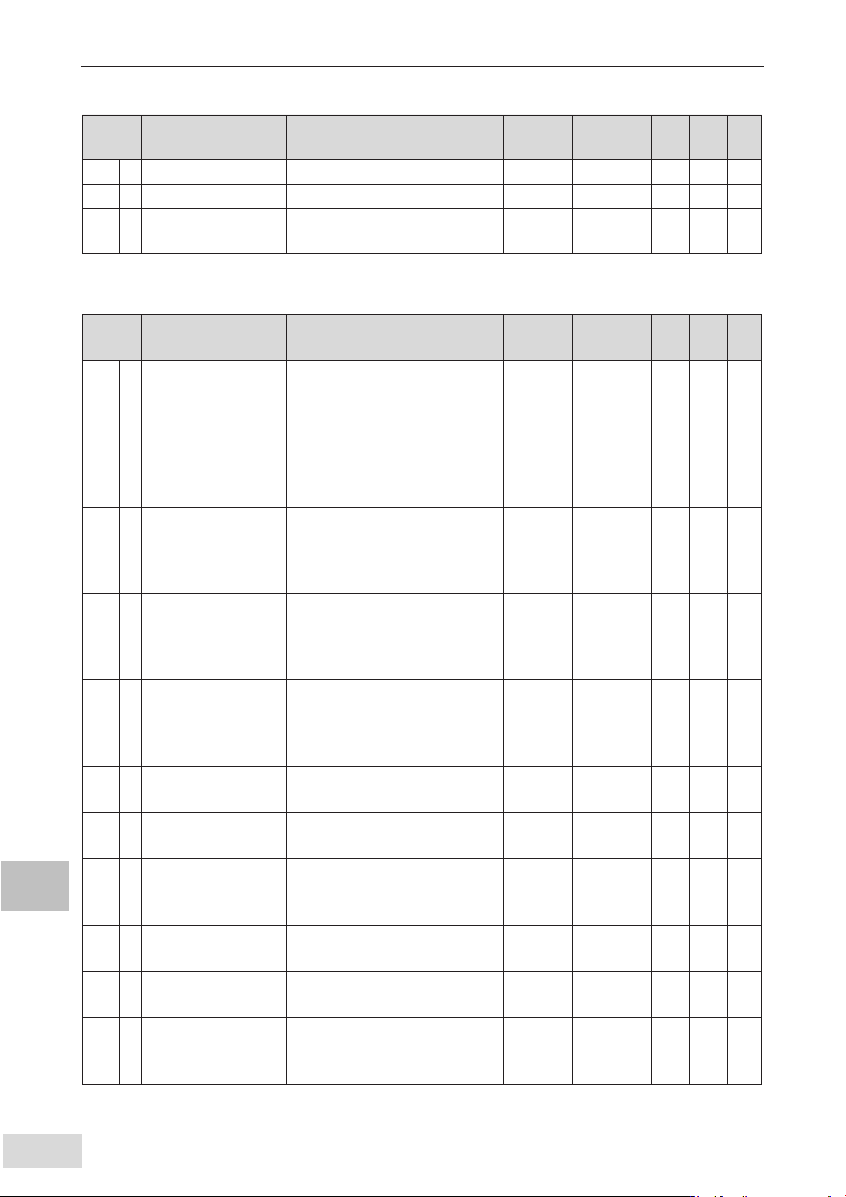
7 第 7 章 功能码参数一览表 IS620P 系列伺服用户手册简易版 - 148 - H01 组 驱动器参数 功能码 名称 设定范围 单位 出厂设定 生效 方式 设定 方式 相关 模式 H01 00 MCU 软件版本号 0~65535 - - - 显示 - H01 01 FPGA 软件版本号 0~65535 - - - 显示 - H01 02 伺服驱动器编号 0~65535 - - 再次 通电 停机 设定 - H02 组 基本控制参数…
7
IS620P
系列伺服用户手册简易版 第
7
章 功能码参数一览表
- 147 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H00 12 额定转矩 0.01~655.35 Nm -
再次
通电
停机
设定
-
H00 13 最大转矩 0.10~655.35 Nm -
再次
通电
停机
设定
-
H00 14 额定转速 100~6000 rpm -
再次
通电
停机
设定
-
H00 15 最大转速 100~6000 rpm -
再次
通电
停机
设定
-
H00 16 转动惯量 Jm 0.01~655.35 kgcm
2
-
再次
通电
停机
设定
-
H00 17 永磁同步电机极对数 2~360 对极 -
再次
通电
停机
设定
-
H00 18 定子电阻 0.001~65.535 Ω -
再次
通电
停机
设定
-
H00 19 定子电感 Lq 0.01~655.35 mH -
再次
通电
停机
设定
-
H00 20 定子电感 Ld 0.01~655.35 mH -
再次
通电
停机
设定
-
H00 21 线反电势系数 0.01~655.35 mV/rpm -
再次
通电
停机
设定
-
H00 22 转矩系数 Kt 0.01~655.35 Nm/Arms -
再次
通电
停机
设定
-
H00 23 电气常数 Te 0.01~655.35 ms -
再次
通电
停机
设定
-
H00 24 机械常数 Tm 0.01~655.35 ms -
再次
通电
停机
设定
-
H00 28 绝对式码盘位置偏置 0~1073741824 P/r -
再次
通电
停机
设定
-
H00 30 编码器选择 (HEX)
0x000- 普通增量式编码器
(UVW-ABZ)
0x013- 汇川 20bit 总线式增量
编码器
1 0x013
再次
通电
停机
设定
-
H00 31 编码器线数 0~1073741824 P/r 1048576
再次
通电
停机
设定
-
H00 33 Z 信号对应角度 0.0~360 ° 180
再次
通电
停机
设定
-
H00 34 U 相上升沿对应角度 0.0~360 ° 180
再次
通电
停机
设定
-
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 148 -
H01 组 驱动器参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H01 00 MCU 软件版本号 0~65535 - - - 显示 -
H01 01 FPGA 软件版本号 0~65535 - - - 显示 -
H01 02 伺服驱动器编号 0~65535 - -
再次
通电
停机
设定
-
H02 组 基本控制参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H02 00 控制模式选择
0- 速度模式
1- 位置模式
2- 转矩模式
3- 转矩模式↔速度模式
4- 速度模式↔位置模式
5- 转矩模式↔位置模式
6- 转矩模式↔速度↔位置混合模式
- 1
立即
生效
停机
设定
-
H02 01 绝对值系统选择
0- 增量位置模式
1- 绝对位置线性模式
2- 绝对位置旋转模式
- 0
再次
通电
停机
设定
ALL
H02 02 旋转方向选择
0- 以 CCW 方向为正转方向
(A 超前 B)
1- 以 CW 方向为正转方向
( 反转模式,A 滞后 B)
- 0
再次
通电
停机
设定
PST
H02 03 输出脉冲相位
0- 以 CCW 方向为正转方向
(A 超前 B)
1- 以 CW 方向为正转方向
( 反转模式,A 滞后 B)
- 0
再次
通电
停机
设定
PST
H02 05
伺服使能 OFF 停机
方式选择
0- 自由停机,保持自由运行状态
1- 零速停机,保持自由运行状态
- 0
立即
生效
停机
设定
PST
H02 06
故障 No.2 停机方式
选择
0- 自由停机,保持自由运行状态
1- 零速停机,保持自由运行状态
- 0
立即
生效
停机
设定
PST
H02 07 超程停机方式选择
0- 自由停机,保持自由运行状态
1- 零速停机,位置保持锁定状态
2- 零速停机,保持自由运行状态
- 1
立即
生效
停机
设定
PST
H02 08
故障 No.1 停机方式
选择
0- 自由停机,保持自由运行状态 - 0
立即
生效
停机
设定
PST
H02 09
抱闸输出 ON 至指令
接收延时
0~500 ms 250
立即
生效
运行
设定
PS
H02 10
静止状态,抱闸输出
OFF 至电机不通电延
时
1~1000 ms 150
立即
生效
运行
设定
PS
7
IS620P
系列伺服用户手册简易版 第
7
章 功能码参数一览表
- 149 -
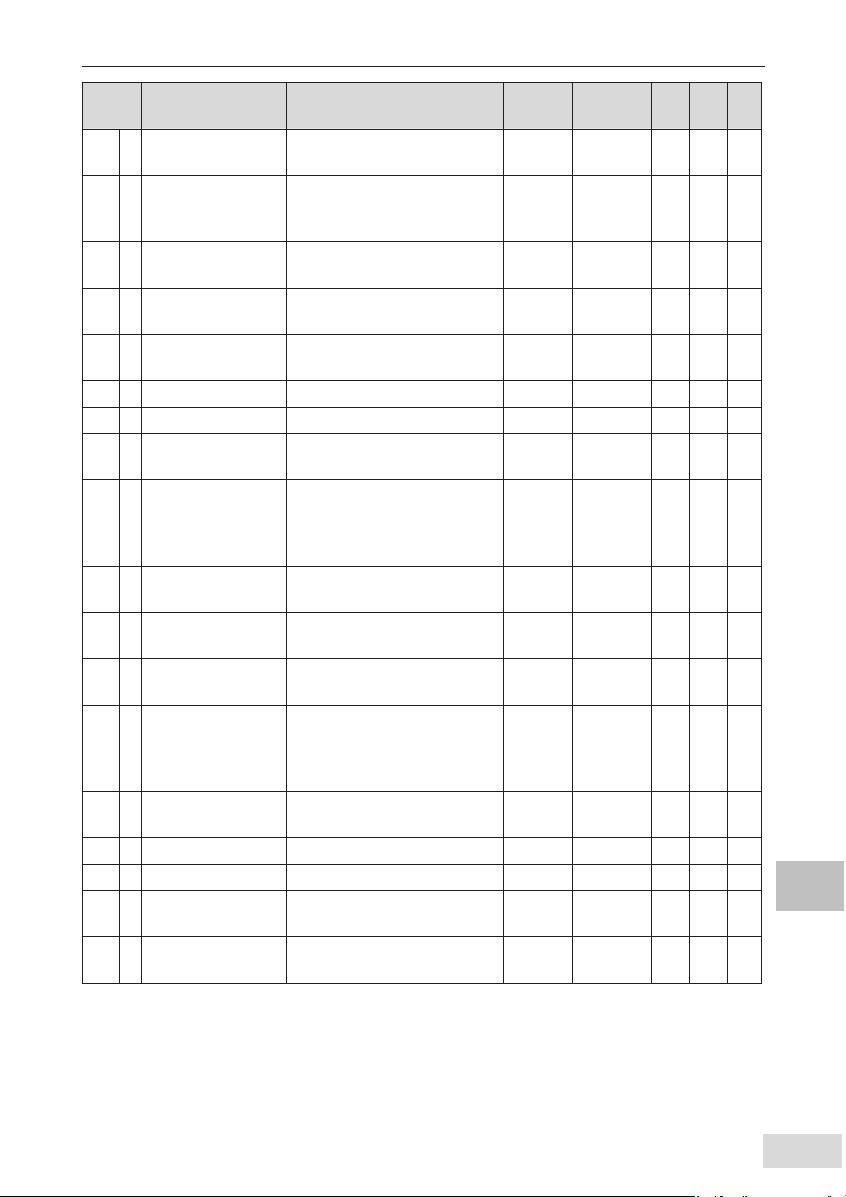
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H02 11
旋转状态,抱闸输出
OFF 时转速阈值
0~3000 rpm 30
立即
生效
运行
设定
PS
H02 12
旋转状态,电机不通
电至抱闸输出 OFF
延时
1~1000 ms 500
立即
生效
运行
设定
PS
H02 15 LED 警告显示选择
0- 立即输出警告信息
1- 不输出警告信息
- 0
立即
生效
停机
设定
PST
H02 18
伺服使能 (S-ON)
滤波时间常数
0~64 ms 0
立即
生效
停机
设定
PST
H02 21
驱动器允许的制动
电阻最小值
- Ω - - 显示 PST
H02 22 内置制动电阻功率 - W - - 显示 PST
H02 23 内置制动电阻阻值 - Ω - - 显示 PST
H02 24 电阻散热系数 10~100 % 30
立即
生效
停机
设定
PST
H02 25 制动电阻设置
0- 使用内置制动电阻
1- 使用外接制动电阻,自然冷却
2- 使用外接制动电阻,强迫风冷
3- 不用制动电阻,全靠电容吸收
- 0
立即
生效
停机
设定
PST
H02 26 外接制动电阻功率 1~65535 W -
立即
生效
停机
设定
PST
H02 27 外接制动电阻阻值 1~1000 Ω -
立即
生效
停机
设定
PST
H02 30 用户密码 0~65535 - 0
再次
通电
停机
设定
PST
H02 31 系统参数初始化
0- 无操作
1- 恢复出厂设定值
( 除 H00/H01 组参数 )
2- 清除故障记录
- 0
立即
生效
停机
设定
PST
H02 32 面板默认显示功能 0~99 - 50
立即
生效
运行
设定
-
H02 33 EtherCAT 软件版本号 - - - - 显示 -
H02 34 CAN 软件版本号 - - - - 显示 -
H02 38 故障短路制动时间 0~30000 ms 5000
立即
生效
运行
设定
PST
H02 39 故障短路制动阈值 0-3000 0.1% 1000
立即
生效
运行
设定
PST