IS620P系列伺服用户手册.pdf - 第97页
4 IS620P 系列伺服用户手册简易版 第 4 章 运行模式与调试方法 - 97 - 4 ) 绝对值位置旋转模式 功能码 名称 设定范围 单位 出厂 设定 生效 时间 类别 相关 模式 H05-50 绝对位置旋转模式 机械齿轮比(分子) 1-65535 - 65535 立即 生效 停机 设定 ALL H05-51 绝对位置旋转模式 机械齿轮比(分母) 1-65535 - 1 立即 生效 停机 设定 ALL H05-52 绝对位置旋转模…
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 96 -
绝对值编码器绝对位置 H0B-79×2
32
+ H0B-77 通过绝对值编码器反馈数据 H0B-70、H0B-71、编
码器分辨率 R
E
计算,当 H0B-70<32768 时(H0B-79×2
32
+ H0B-77)=H0B-70×R
E
+ H0B-71,
当 H0B-70≥32768 时(H0B-79×2
32
+ H0B-77)=(H0B-70-65536)×R
E
+ H0B-71 。
3) 绝对值位置线性模式
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H05-46
绝对位置线性模
式位置偏置(低
32 位)
-2147483648~2147483647
编码器
单位
0
立即
生效
停机
设定
ALL
H05-48
绝对位置线性模
式位置偏置(高
32 位)
-2147483648~2147483647
编码器
单位
0
立即
生效
停机
设定
ALL
H0B-07 绝对位置计数器 -
指令单
位
0 - 显示 PST
H0B-58
机械绝对位置(低
32 位)
-
编码器
单位
0 - 显示 ALL
H0B-60
机械绝对位置(高
32 位)
-
编码器
单位
0 - 显示 ALL
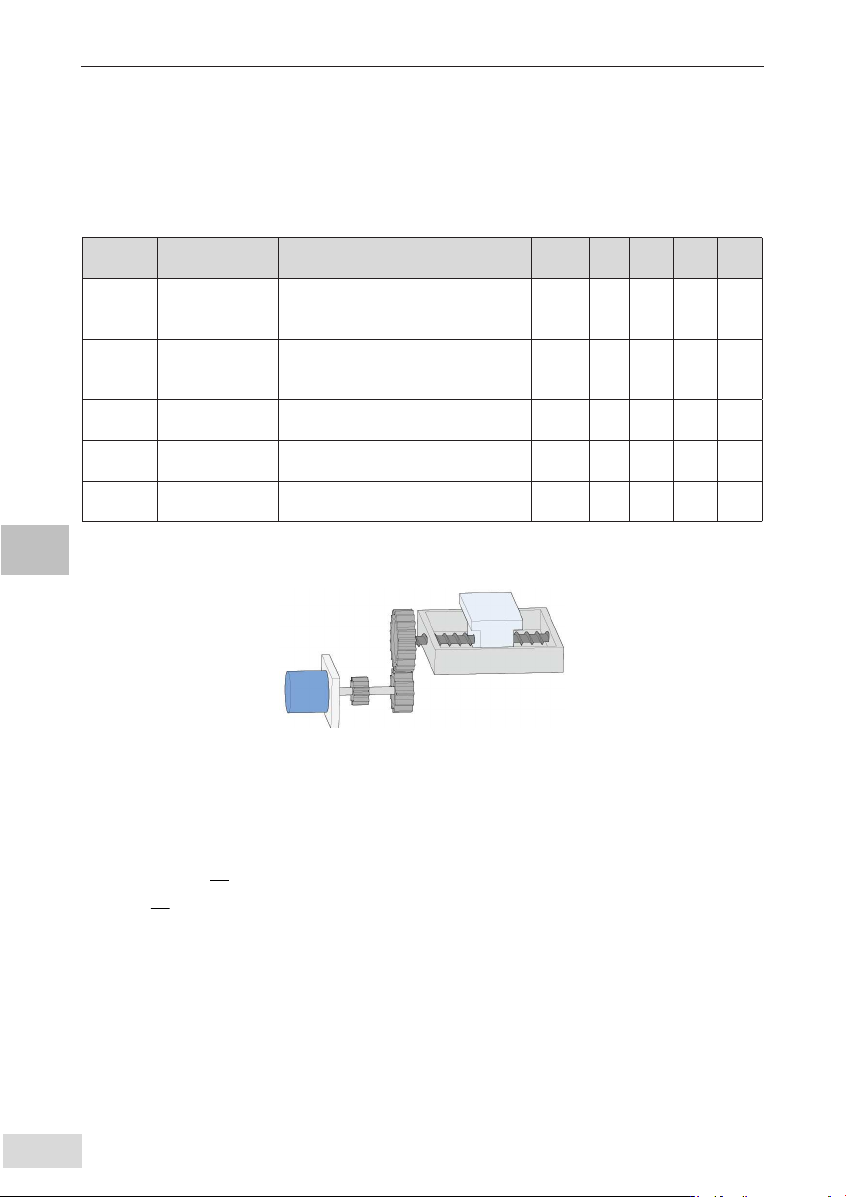
此模式主要用于设备负载行程范围固定,编码器多圈数据不会溢出的场合,如下图滚珠丝杠传动
机构。
图 4-16 滚珠丝杠传动机构示意图
假设机械绝对位置 (H0B-58 和 H0B-60) 为 P
M
,(PM=H0B-60×2
32
+ H0B-58), 编码器绝对位置为
P
E
【P
E
范围为 -2
38
~(2
38
-1)】,绝对位置线性模式位置偏置 (H05-46 和 H05-48) 为 P
O
,则三者关
系为 P
M
=P
E
- P
O
。
假设电子齿轮比为
电子齿轮比
B
A
=
编码器分辨率
,绝对位置计数器(H0B-07)表示机械当前绝对位置(指令单位),H0B-
07=P
M
/(
电子齿轮比
B
A
=
编码器分辨率
)。
绝对位置线性模式位置偏置 H05-46 和 H05-48 默认为 0,启用驱动器原点复归功能,原点复归结
束后驱动器自动计算编码器绝对位置与机械绝对位置偏差,赋值给 H05-46 和 H05-48 并保存在
EEPROM 中。
绝对位置线性模式编码器多圈数据范围是 -32768~32767,如果正转圈数大于 32767 或反转圈数
小于 -32768,会发生 Er. 735(编码器多圈计数溢出故障),可通过设置 H0A-36 屏蔽该故障。
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 97 -
4) 绝对值位置旋转模式
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H05-50
绝对位置旋转模式
机械齿轮比(分子)
1-65535 - 65535
立即
生效
停机
设定
ALL
H05-51
绝对位置旋转模式
机械齿轮比(分母)
1-65535 - 1
立即
生效
停机
设定
ALL
H05-52
绝对位置旋转模式负载旋
转一圈的脉冲数(编码器
单位 低 32 位)
0~ 4294967295
编码器
单位
0
立即
生效
停机
设定
ALL
H05-54
绝对位置旋转模式负载旋
转一圈的脉冲数(编码器
单位 高 32 位)
0~ 127
编码器
单位
0
立即
生效
停机
设定
ALL
H0B-07 绝对位置计数器 -
指令单
位
0 - 显示 ALL
H0B-58 机械绝对位置(低 32 位) -
编码器
单位
0 - 显示 ALL
H0B-60 机械绝对位置(高 32 位) -
编码器
单位
0 - 显示 ALL
H0B-81
旋转负载单圈位置 ( 低 32
位 )
-
编码器
单位
0 - 显示 ALL
H0B-83
旋转负载单圈位置 ( 高 32
位)
-
编码器
单位
0 - 显示 ALL
H0B-85 旋转负载单圈位置 -
指令单
位
0 - 显示 ALL
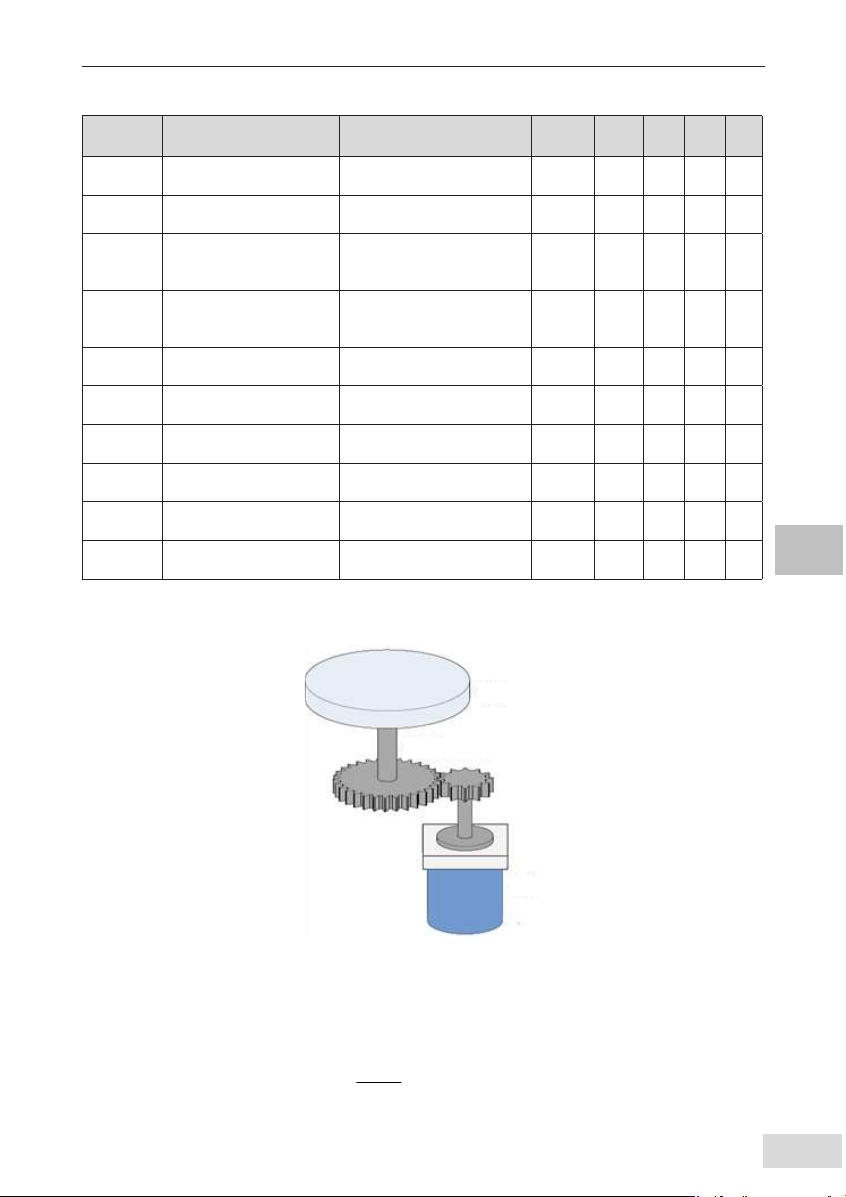
此模式主要用于设备负载行程范围不受限制,掉电时电机单方向旋转圈数小于 32767,如下图旋
转负载。
转台
齿轮比 M:N
电机
图 4-17 旋转负载示意图
驱动器内部计算机械绝对位置上限值优先使用 H05-52、H05-54,当 H05-52、H05-54 均为 0 的
情况下再使用机械齿轮比 H05-50、H05-51 计算。假设编码器分辨率 R
E
(R
E
=2
23
),假设负载旋
转一圈对应的编码器脉冲数为 R
M
,H05-52 或 H05-54 不等于 0 时,R
M
= H05-54×2
32
+ H05-52;
H05-52、H05-54 均为 0 时,R
M
=R
E
23
×
-
H0550
H0551
。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 98 -
假设电子齿轮比为
电子齿轮比
B
A
=
编码器分辨率
,
旋转负载单圈位置(编码器单位,
H0B-83×2
32
+ H0B-81)范围 0~R
M
,
旋转
负载单圈位置(指令单位,
H0B-85)范围 0~R
M
/(
电子齿轮比
B
A
=
编码器分辨率
):
H0B-85=(H0B-83×2
32
+ H0B-81)/(
电子齿轮比
B
A
=
编码器分辨率
)。
假设机械绝对位置 (H0B-58 和 H0B-60) 为 P
M
(P
M
=H0B-60×2
32
+ H0B-58):
P
M
= 转台圈数 ×R
M
+(H0B-83×2
32
+ H0B-81)
假设电子齿轮比为
电子齿轮比
B
A
=
编码器分辨率
,绝对位置计数器(H0B-07)表示机械当前绝对位置(指令单位):
H0B-07=P
M
/(
电子齿轮比
B
A
=
编码器分辨率
)= 转台圈数 ×R
M
/(
电子齿轮比
B
A
=
编码器分辨率
)+H0B-85
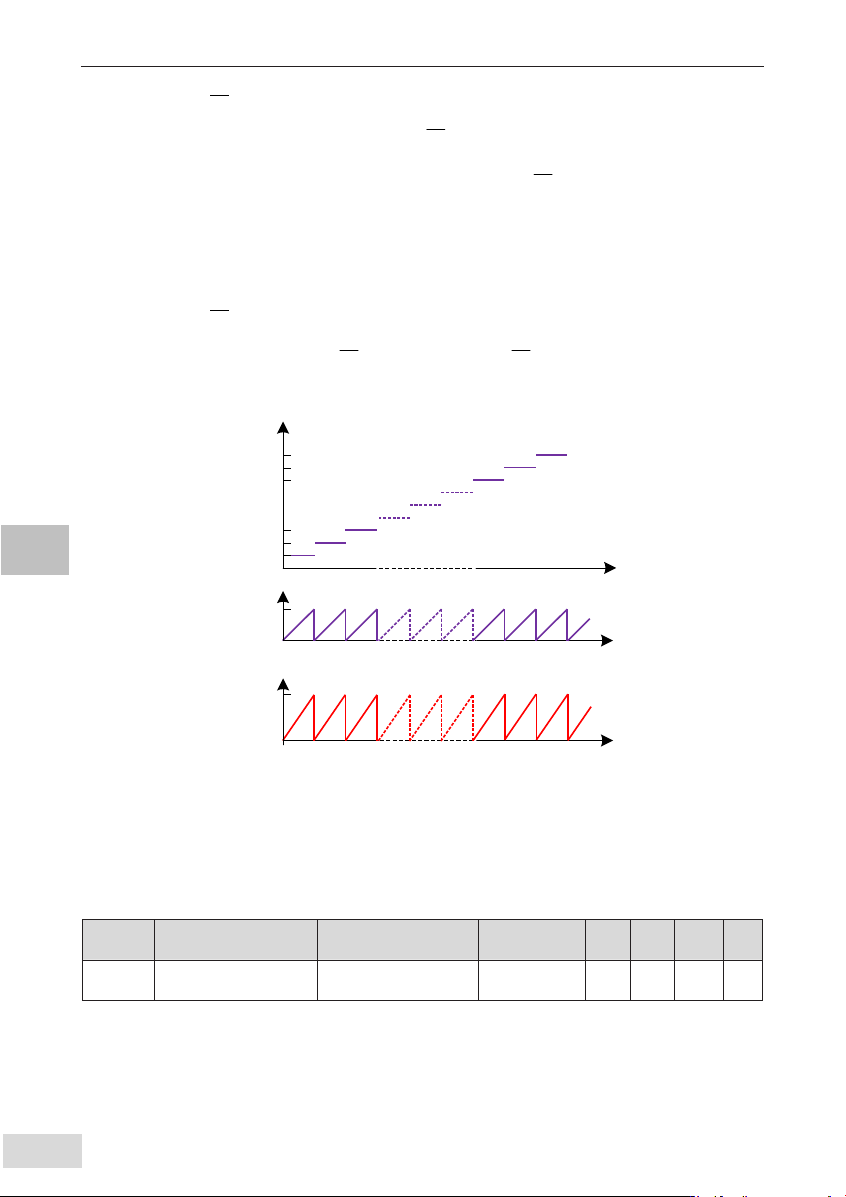
旋转负载单圈位置与转台位置对应关系如下图所示:
0
旋转量
2
1
3
转台旋转
圈数
0
旋转量
旋转负载
单圈位置
旋转负载
单圈位置
n
n+1
n+2
H0B-81
H0B-83
(编码器单位)
H0B-85
(指令单位)
图 4-18 旋转负载单圈位置与转台位置对应关系示意图
绝对位置旋转模式多圈数据范围无限制,屏蔽 Er. 735(编码器多圈计数溢出故障)。
5) 编码器多圈溢出故障选择
绝对位置线性模式下通过设置 H0A-36 屏蔽编码器多圈溢出故障。
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H0A-36
编码器多圈溢出故障选
择
0- 不屏蔽
1- 屏蔽
- 0
立即
生效
停机
设定
ALL