IS620P系列伺服用户手册.pdf - 第145页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 145 - 16 ) Er .994 : CAN 地址冲突 原因 确认方法 处理措施 CANlink 地址冲突 ◆ 确认从站 H0C-00 间是否存在重复分配。 分配各从站地址, 确保 H0C-00 不重复。 6.2.4 内部故障 发生以下故障时,请联系我司技术人员。 ● Er .602 :角度辨识失败; ● Er .220 :相序错误; ● Er .A40 :参…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 144 -
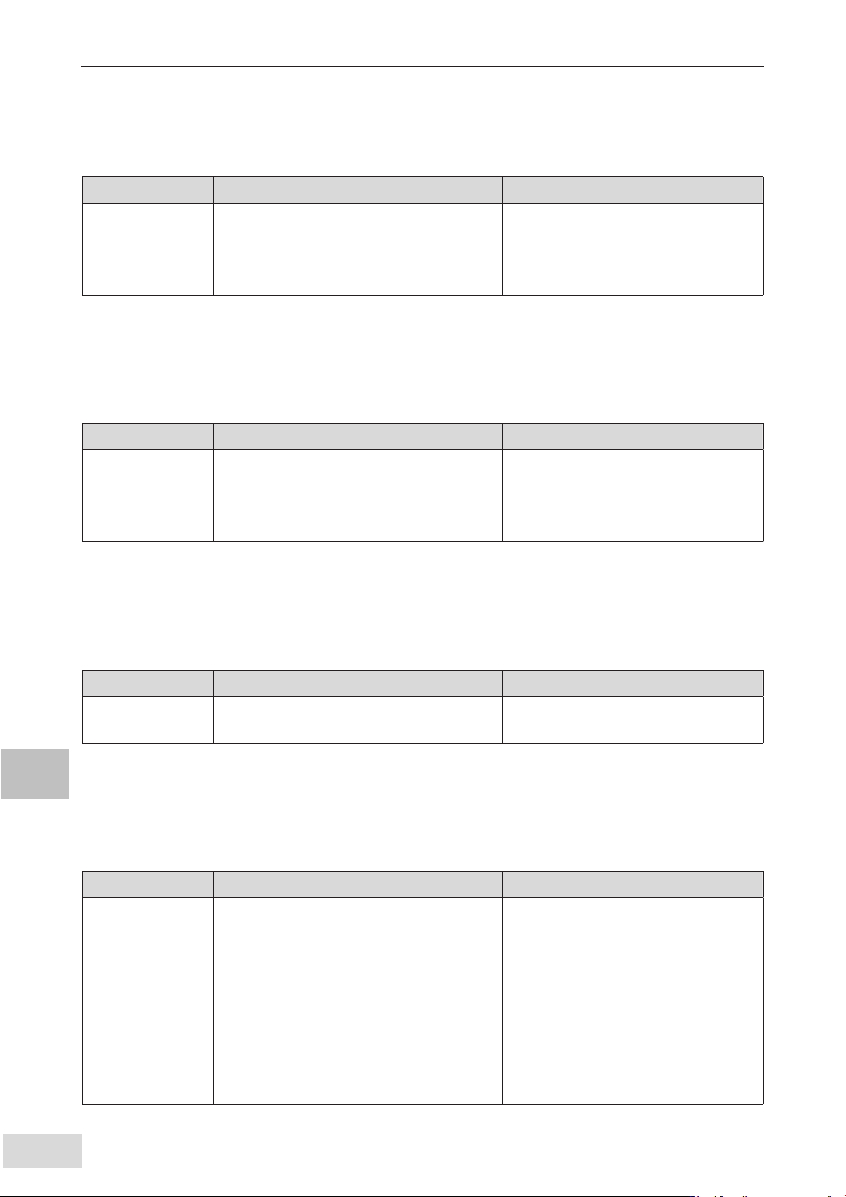
12) Er.950:正向超程警告
产生机理:
● DI 功能 14(FunIN.14:P-OT,正向超程开关 ) 对应的 DI 端子逻辑有效。
原因 确认方法 处理措施
DI 功能 14:禁止
正向驱动,端子
逻辑有效
◆ 检查 H03 组 DI 端子是否设置 DI 功能
14
◆ 查看输入信号监视 (H0B-03) 对应位的
DI 端子逻辑是否有效。
检查运行模式,确定安全的前提下,
给负向指令或转动电机,使“正向超
程开关”端子逻辑变为无效。
13) Er.952:反向超程警告
产生机理:
● DI 功能 15(FunIN.15:N-OT,反向超程开关 ) 对应的 DI 端子逻辑有效。
原因 确认方法 处理措施
DI 功能 15:禁止
反向驱动,端子
逻辑有效。
◆ 检查 H03 组 DI 端子是否设置了 DI 功能
15;
◆ 查看输入信号监视 (H0B-03) 对应位的
DI 端子逻辑是否有效。
检查运行模式,确定安全的前提下,
给负向指令或转动电机,使“反向超
程开关”端子逻辑变为无效。
14) Er.980:编码器内部故障
产生机理:
● 编码器算法出错。
原因 确认方法 处理措施
编码器内部故障
◆ 多次接通电源后仍报故障时, 编码器
产生故障。
更换伺服电机。
15) Er.990:输入缺相警告
产生机理:
● 允许 1kW 以下的驱动器允许单相运行,但使能了电源输入缺相故障和警告 (H0A-00)。
原因 确认方法 处理措施
H0A-00=1
( 电源输入缺相保
护选择:使能故
障和警告 ) 时,对
于 0.75kW 三相驱
动器 ( 驱动器型号
H01-02=5),允许
运行在单相电源
下,接入单相电
源时,会报警告。
◆ 确认是否为允许单相运行的三相驱动器
若实际为三相驱动器,且主回路电源
线连接三相电源,仍报警告,则按
Er.420 处理;
若实际为三相规格驱动器且允许单相
运行,且主回路电源线连接单相电源,
仍报警告,则将 H0A-00 置 0。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 145 -
16) Er.994:CAN 地址冲突
原因 确认方法 处理措施
CANlink 地址冲突 ◆ 确认从站 H0C-00 间是否存在重复分配。分配各从站地址,确保 H0C-00 不重复。
6.2.4 内部故障
发生以下故障时,请联系我司技术人员。
● Er.602:角度辨识失败;
● Er.220:相序错误;
● Er.A40:参数辨识失败;
● Er.111:伺服内部参数异常。
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 146 -
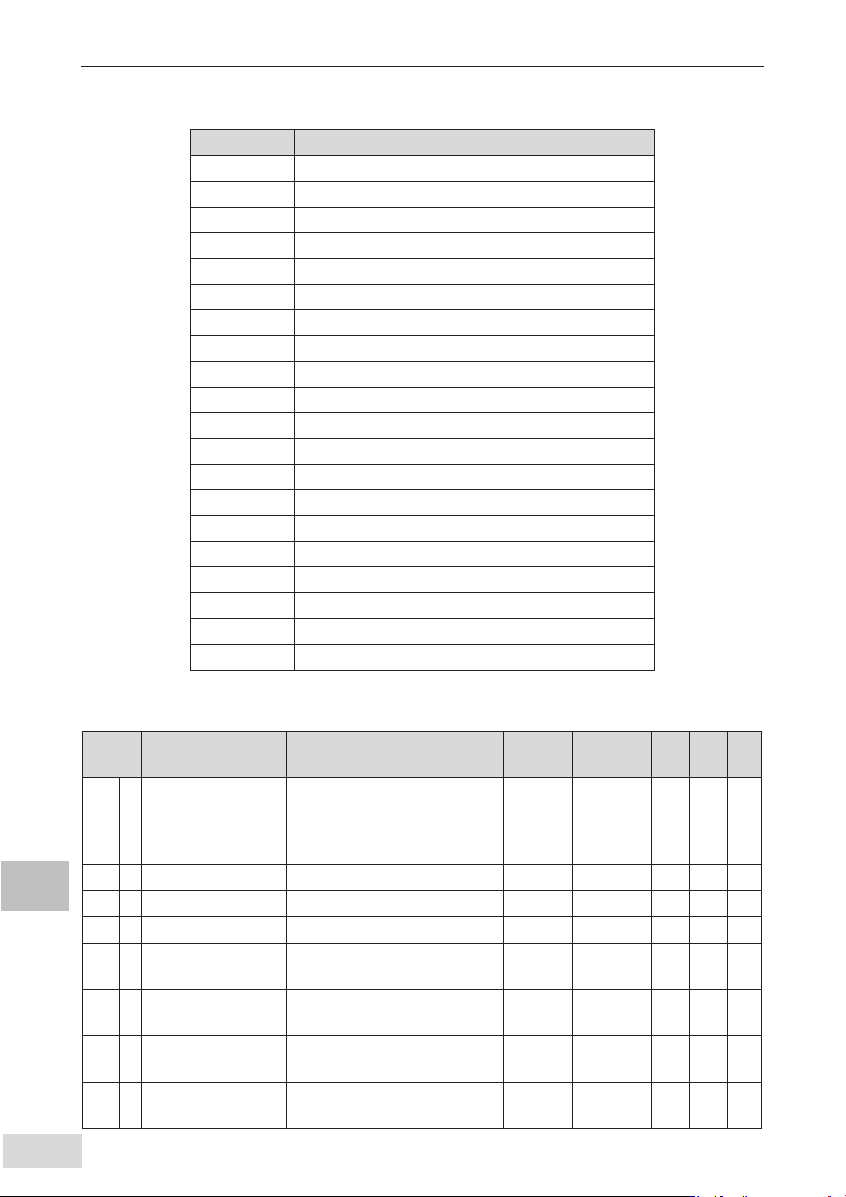
第 7 章 功能码参数一览表
功能码组 参数组概要
H00 组 伺服电机参数
H01 组 驱动器参数
H02 组 基本控制参数
H03 组 端子输入参数
H04 组 端子输出参数
H05 组 位置控制参数
H06 组 速度控制参数
H07 组 转矩控制参数
H08 组 增益类参数
H09 组 自调整参数
H0A 组 故障与保护参数
H0B 组 监控参数
H0C 组 通讯参数
H0D 组 辅助功能参数
H0F 组 全闭环功能参数
H11 组 多段位置功能参数
H12 组 多段速度参数
H17 组 虚拟 DIDO 参数
H30 组 通讯读取伺服相关变量
H31 组 通讯给定伺服相关变量
H00 组 伺服电机参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H00 00 电机编号
14000- 汇川 20 位增量编码器电
机
14101- 汇川 23 位绝对值编码器
电机
- 14000
再次
通电
停机
设定
ALL
H00 02 非标号 - - - - 显示 -
H00 04 编码器版本号 - - - - 显示 -
H00 05 总线电机编号 - - - - 显示 -
H00 08 绝对编码器类型
14100- 多圈绝对编码器
其他 - 单圈绝对编码器
- -
再次
通电
停机
设定
ALL
H00 09 额定电压
0-220
1-380
V -
再次
通电
停机
设定
-
H00 10 额定功率 0.01~655.35 kW -
再次
通电
停机
设定
-
H00 11 额定电流 0.01~655.35 A -
再次
通电
停机
设定
-