IS620P系列伺服用户手册.pdf - 第59页
3 IS620P 系列伺服用户手册简易版 第 3 章 伺服驱动器与电机的连接说明 - 59 - 2 ) 数字量输出电路 以 DO1 为例说明, DO1~DO5 接口电路相同。 a ) 当上位装置为继电器输入时: 伺服驱动器 外部 5~24 Vdc DO1- DO1+ 6 7 继电器 外部 0 V ■ 当上级装置为继电器输入时,请务必接入续流二极管,否则可能损坏 DO 端口。 注: 伺服驱动器 外部 5~24 Vdc DO1- DO1+ …
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 58 -
② 使用外部电源时:
伺服驱动器
14
外部+24Vdc
DI1(CMD1)
24V
COM+
9
11
17
继电器
外部 0V
4.7kΩ
伺服驱动器
14
外部+24Vdc
DI1(CMD1)
24V
COM+
9
11
17
继电器
外部 0V
+24V电源
COM-
未使用单电源供电
4.7kΩ
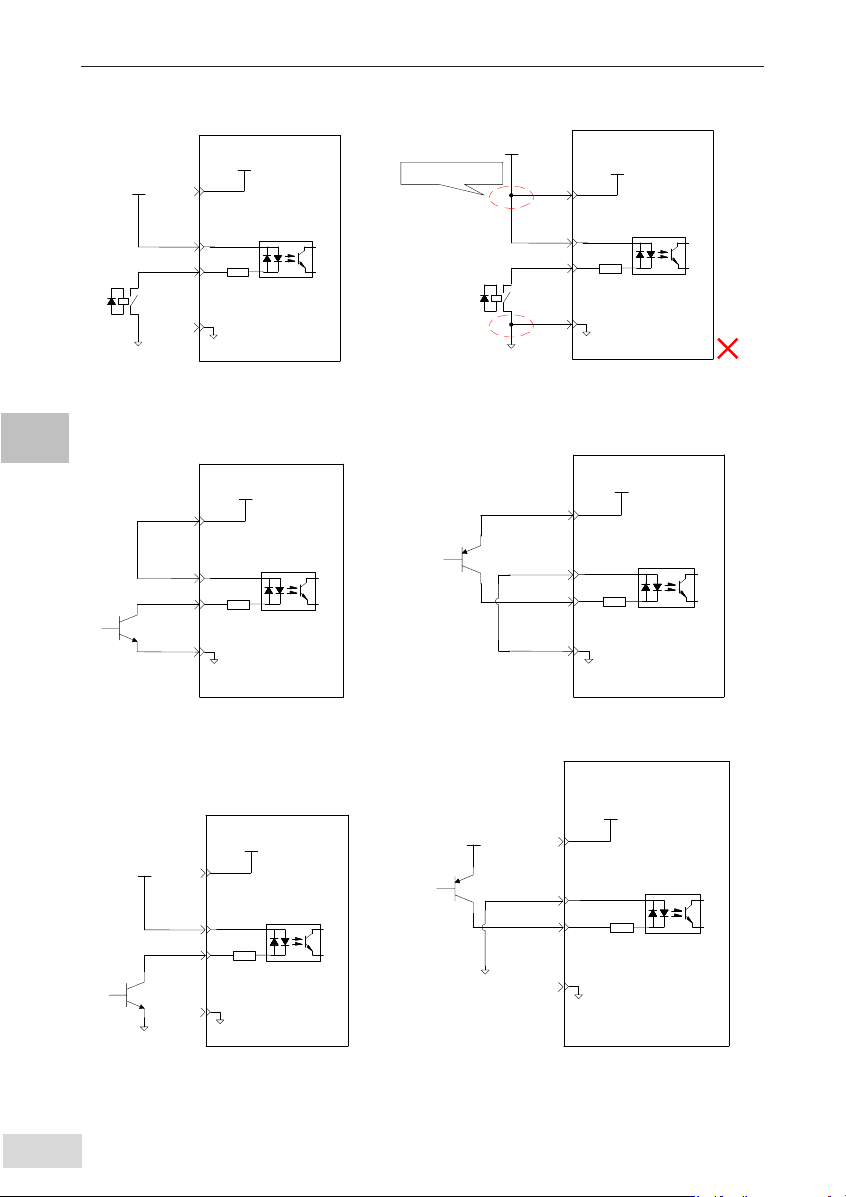
b) 当上位装置为集电极开路输出时:
① 使用伺服驱动器内部 24V 电源时:
伺服驱动器
14
COM-
+24V电源
DI1(CMD1)
24V
COM+
9
11
17
NPN
4.7kΩ
伺服驱动器
14
COM-
+24V电源
DI1(CMD1)
24V
COM+
9
11
17
PNP
4.7kΩ
② 使用外部电源时:
伺服驱动器
14
外部+24Vdc
DI1(CMD1)
24V
COM+
9
11
17
外部 0V
NPN
4.7kΩ
伺服驱动器
14
外部+24Vdc
DI1(CMD1)
24V
COM+
9
11
17
4.7kΩ
外部 0V
PNP
■ 不支持 PNP 与 NPN 输入混用情况。
注:
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 59 -
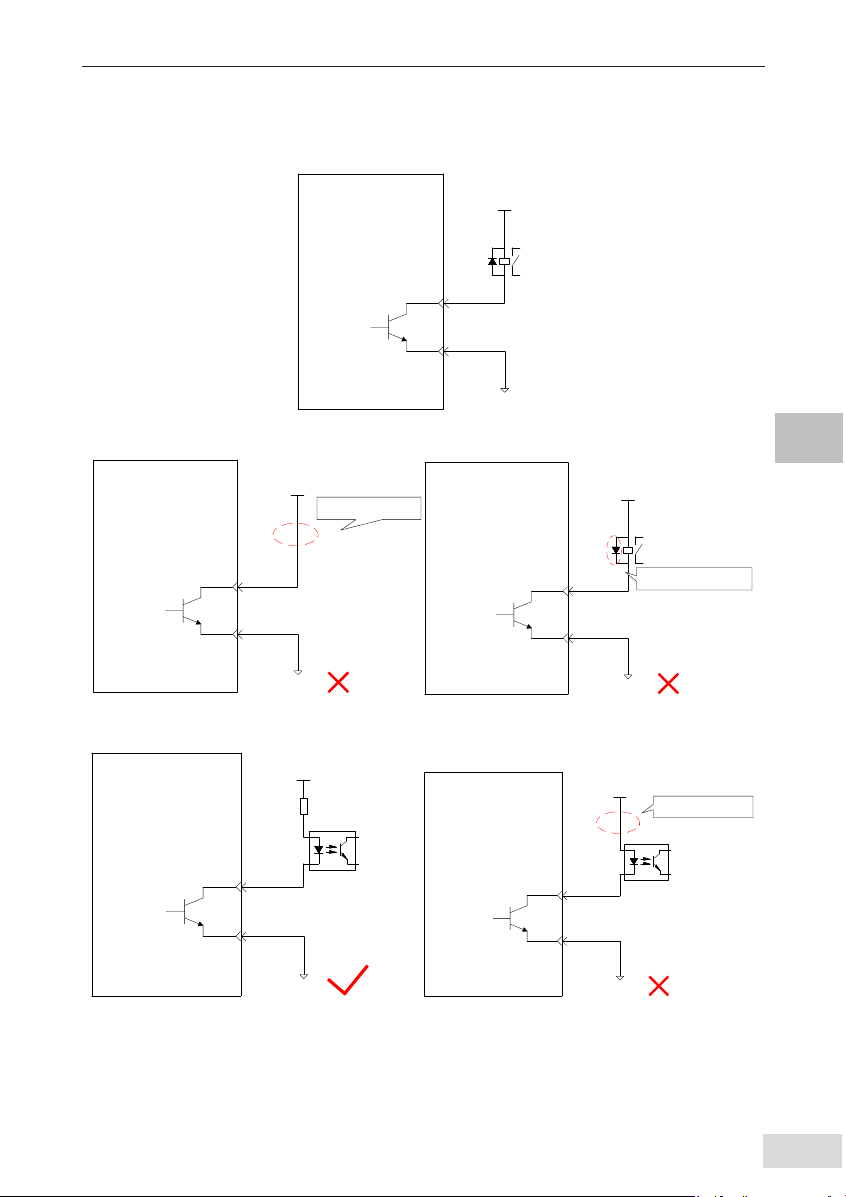
2) 数字量输出电路
以 DO1 为例说明,DO1~DO5 接口电路相同。
a) 当上位装置为继电器输入时:
伺服驱动器
外部 5~24 Vdc
DO1-
DO1+
6
7
继电器
外部 0 V
■ 当上级装置为继电器输入时,请务必接入续流二极管,否则可能损坏 DO 端口。
注:
伺服驱动器
外部 5~24 Vdc
DO1-
DO1+
6
7
外部 0 V
未接入继电器
伺服驱动器
外部 5~24 Vdc
DO1-
DO1+
6
7
继电器
外部 0 V
续流二级管极性错误
b) 当上位装置为光耦输入时:
伺服驱动器
外部 5~24 Vdc
DO1-
DO1+
6
7
光耦
外部 0 V
伺服驱动器
外部 5~24 Vdc
DO1-
DO1+
6
7
光耦
外部 0 V
未接限流电阻
伺服驱动器内部光耦输出电路最大允许电压、电流容量如下:
● 电压:DC30V( 最大 )
● 电流:DC50mA( 最大 )
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 60 -
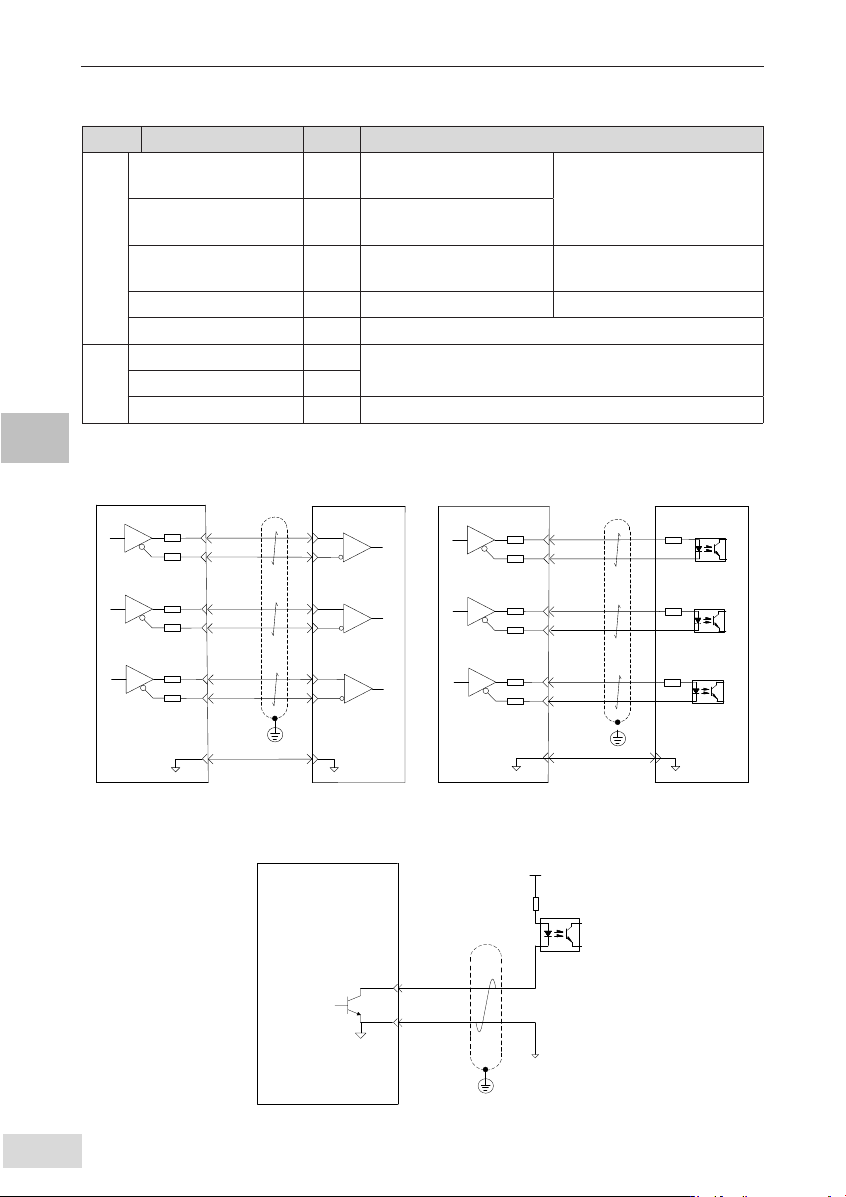
3.3.4 编码器分频输出电路
表 3-23 编码器分频输出信号说明
信号名 默认功能 针脚号 功能
通用
PAO+
PAO-
21
22
A 相分频输出信号
A、B 的正交分频脉冲输出信号
PBO+
PBO-
25
23
B 相分频输出信号
PZO+
PZO-
13
24
Z 相分频输出信号 原点脉冲输出信号
PZ-OUT 44 Z 相分频输出信号 原点脉冲集电极开路输出信号
GND 29 原点脉冲集电极开路输出信号地
通用
+5V 15
内部 5V 电源,最大输出电流 200mA。
GND 16
PE 机壳
编码器分频输出电路通过差分驱动器输出差分信号。通常,为上位装置构成位置控制系统时,提
供反馈信号。在上位装置侧,请使用差分或者光耦接收电路接收,最大输出电流为 20mA。
伺服驱动器
21
22
PAO+
PAO-
25
23
PBO+
PBO-
13
24
PZO+
PZO-
GND
29
GND
上位装置
最大输出电流
20mA
36Ω
36Ω
36Ω
36Ω
36Ω
36Ω
伺服驱动器
21
22
PAO+
PAO-
25
23
PBO+
PBO-
13
24
PZO+
PZO-
最大输出电流
光耦
GND
29
GND
上位装置
20mA
36Ω
36Ω
36Ω
36Ω
36Ω
36Ω
编码器 Z 相分频输出电路可通过集电极开路信号。通常,为上位装置构成位置控制系统时,提供
反馈信号。在上位装置侧,请使用光电耦合器电路、继电器电路或总线接收器电路接收。
伺服驱动器
外部 5~24 Vdc
GND
PZ-OUT
29
44
光耦
外部 0 V
GND