IS620P系列伺服用户手册.pdf - 第115页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 1 15 - ☆ 关联功能编号: 编码 名称 功能名 功能 FunIN.2 ALM-RST 故障和警告复位 信号 该 DI 功能为边沿有效,电平持续为高 / 低电平时 无效。 按照报警类型,有些报警复位后伺服是可以继续 工作的。 分配到低速 DI 时,若 DI 逻辑设置为电平有效, 将被强制为沿变化有效,有效的电平变化务必保 持 3ms 以上,否则将导致故障复位功…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 114 -
启动过程 故障现象 原因 确认方法
输入转矩指令
伺服电机反转
内部转矩指令 (H0B-02)
为负数
◆ 选用模拟量输入指令时,外部信号源输入电压
极性是否反向,可用示波器或通过 H0B-21 或
H0B-22 查看;
◆ 数字给定时,查看 H07-03 是否小于 0;
◆ 通讯给定时,查看 H31-11 是否小于 0
◆ 查看是否已设置 DI 功能 25(FunIN.25:
ToqDirSel,转矩指令方向设置 ) 及对应端子
逻辑是否有效;
◆ 查看 H02-02 参数是否设置错误。
■ 排除上述故障后,伺服电机能旋转。
低速旋转不
平稳
低速旋转时
速度不稳定
增益设置不合理 ◆ 进行自动增益调整。
电机轴左右
振动
负载转动惯量比
(H08-15) 太大
◆ 若可安全运行,则重新进行惯量辨识;
◆ 进行自动增益调整。
6.2 运行时的故障和警告处理
6.2.1 故障和警告代码表
1) 故障和警告分类
伺服驱动器的故障和警告按严重程度分级,可分为三级,第 1 类、第 2 类、第 3 类,严重等级:
第 1 类 > 第 2 类 > 第 3 类,具体分类如下:
● 第 1 类 ( 简称 NO.1) 不可复位故障;
● 第 1 类 ( 简称 NO.1) 可复位故障;
● 第 2 类 ( 简称 NO.2) 可复位故障;
● 第 3 类 ( 简称 NO.3) 可复位警告。
“可复位”是指通过给出“复位信号”使面板停止故障显示状态。
具体操作:设置参数 H0D-01=1 ( 故障复位 ) 或者使用 DI 功能 2(FunIN.2: ALM-RST,故障和警
告复位 ) 且置为逻辑有效,可使面板停止故障显示。
NO.1、NO.2 可复位故障的复位方法:先关闭伺服使能信号 (S-ON 置为 OFF),然后置 H0D-
01=1 或使用 DI 功能 2。
NO.3 可复位警告的复位方法:置 H0D-01=1 或使用 DI 功能 2。
注:
■ 对于一些故障或警告,必须通过更改设置,将产生的原因排除后,才可复位,但复位不代表更改生
效。对于需要重新上控制电 (L1C、L2C) 才生效的更改,必须重新上控制电;对于需要停机才生效
的更改,必须关闭伺服使能。更改生效后,伺服驱动器才能正常运行。
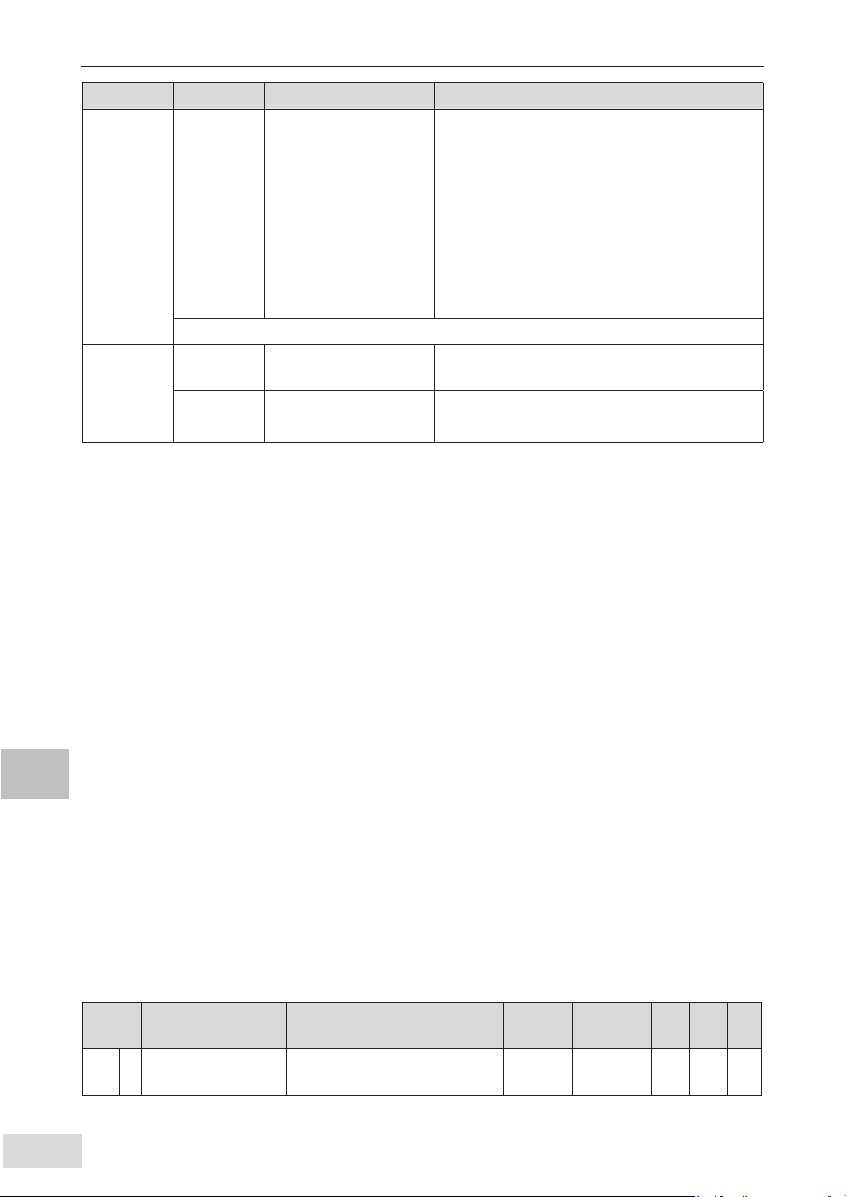
☆关联功能码:
功能码 名称 设定范围 单位 出厂设定
设定
方式
生效
时间
相关
模式
H0D 01 故障复位
0- 无操作
1- 故障和警告复位
- 0
停机
设定
立即
生效
-
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 115 -
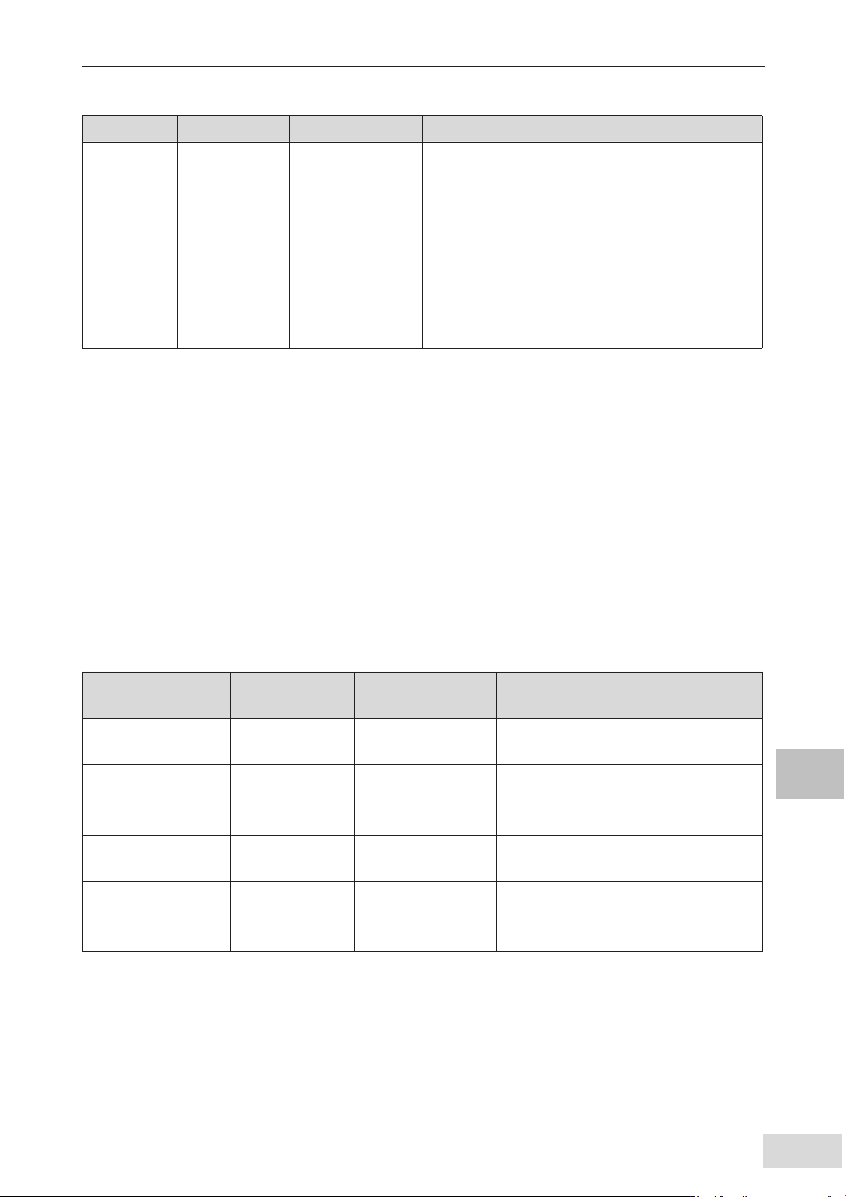
☆关联功能编号:
编码 名称 功能名 功能
FunIN.2 ALM-RST
故障和警告复位
信号
该 DI 功能为边沿有效,电平持续为高 / 低电平时
无效。
按照报警类型,有些报警复位后伺服是可以继续
工作的。
分配到低速 DI 时,若 DI 逻辑设置为电平有效,
将被强制为沿变化有效,有效的电平变化务必保
持 3ms 以上,否则将导致故障复位功能无效。
请勿分配故障复位功能到快速 DI,否则功能无效。
无效,不复位故障和警告;
有效,复位故障和警告;
2) 故障和警告记录
伺服驱动器具有故障记录功能,可以记录最近 10 次的故障和警告名称及故障或警告发生时伺服
驱动器的状态参数。若最近 5 次发生了重复的故障或警告,则故障或警告代码即驱动器状态仅记
录一次。
故障或警告复位后,故障记录依然会保存该故障和警告;使用“系统参数初始化功能”(H02-31=1
或 2) 可清除故障和警告记录。
通过监控参数 H0B-33 可以选择故障或警告距离当前故障的次数 n,H0B-34 可以查看第 n+1 次故
障或警告名称,H0B-35~H0B-42 可以查看对应第 n+1 次故障或警告发生时伺服驱动器的状态参数,
参数详情请参考第 4 章。没有故障发生时面板上 H0B-34 显示“Er.000”。
通过面板查看 H0B-34( 第 n+1 次故障或警告名称 ) 时,面板显示“Er.xxx”,“xxx”为故障或警
告代码;通过汇川驱动调试平台软件或者通讯读取 H0B-34 时,读取的是代码的十进制数据,需
要转化成十六进制数据以反映真实的故障或警告代码,例如:
面板显示故障或警告
“Er.xxx”
H0B-34( 十进制 ) H0B-34( 十六进制 ) 说明
Er.101 257 0101
0:第 1 类不可复位故障
101:故障代码
Er.130 8496 2130
2:第 1 类可复位故障
130:故障代码
Er.121 24865 6121
6:第 2 类可复位故障
121:故障代码
Er.110 57616 E110
E:第 3 类可复位警告
110:警告代码
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 116 -
3) 故障和警告编码输出
伺服驱动器能够输出当前最高级别的故障或警告编码。
“故障编码输出”是指将伺服驱动器的 3 个 DO 端子设定成 DO 功能 12、13、14,其中
FunOUT.12:ALMO1( 报警代码第 1 位,简称 AL1),FunOUT.13:ALMO2( 报警代码第 2 位,
简称 AL2),FunOUT.14:ALMO3( 报警代码第 3 位 ,,简称 AL3)。不同的故障发生时,3 个 DO
端子的电平将发生变化。
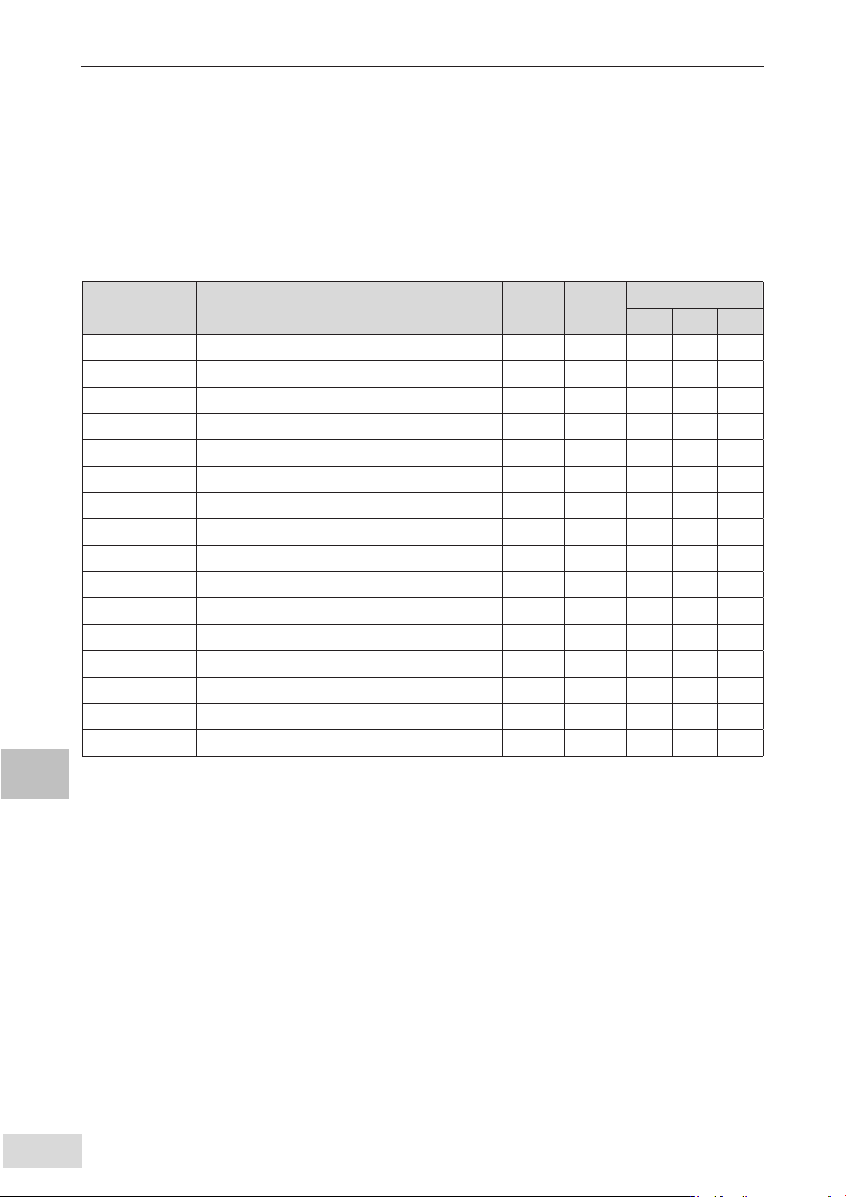
a) 第 1 类 (NO.1) 不可复位故障:
显示 故障名称 故障类型 能否复位
编码输出
AL3 AL2 AL1
Er.101 H02 及以上组参数异常 NO.1 否 1 1 1
Er.102 可编程逻辑配置故障 NO.1 否 1 1 1
Er.104 可编程逻辑中断故障 NO.1 否 1 1 1
Er.105 内部程序异常 NO.1 否 1 1 1
Er.108 参数存储故障 NO.1 否 1 1 1
Er.111 内部故障 NO.1 否 1 1 1
Er.120 产品匹配故障 NO.1 否 1 1 1
Er.122 绝对位置模式产品匹配故障 NO.1 否 1 1 1
Er.136 电机 ROM 中数据校验错误或未存入参数 NO.1 否 1 1 1
Er.201 过流 2 NO.1 否 1 1 0
Er.208 FPGA 系统采样运算超时 NO.1 否 1 1 0
Er.210 输出对地短路 NO.1 否 1 1 0
Er.220 相序错误 NO.1 否 1 1 0
Er.234 飞车 NO.1 否 1 1 0
Er.740 编码器干扰 NO.1 否 1 1 1
Er.A33 编码器数据异常 NO.1 否 0 1 0
注:
■ “1”表示有效,“0”表示无效,不代表 DO 端子电平的高低。