IS620P系列伺服用户手册.pdf - 第169页
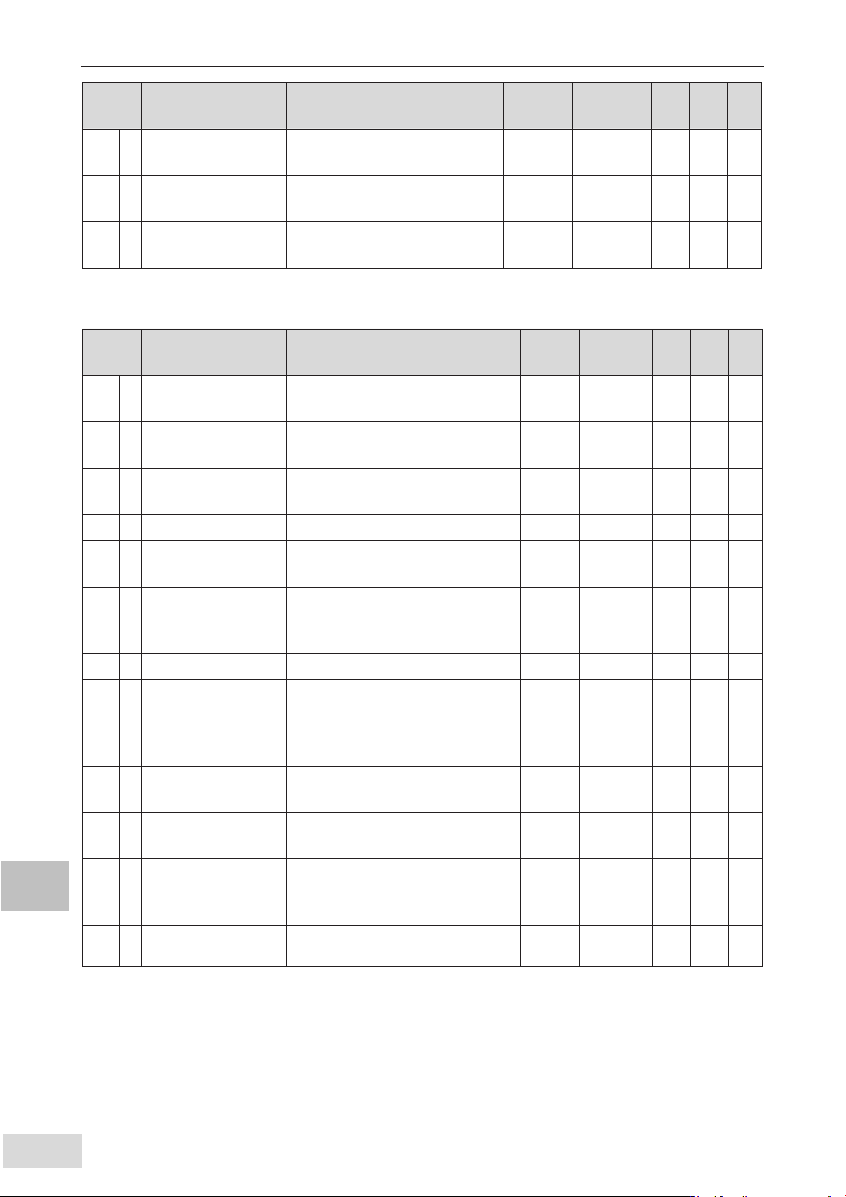
7 IS620P 系列伺服用户手册简易版 第 7 章 功能码参数一览表 - 169 - H0F 组 全闭环功能参数 功能码 名称 设定范围 单位 出厂设定 生效 方式 设定 方式 相关 模式 H0F 00 编码器反馈模式 0~2 - 0 立即 生效 停机 设定 P H0F 01 外部编码器使用方式 0- 以标准运行方向使用 1- 以反转运行方向使用 - 0 立即 生效 停机 设定 P H0F 04 电机旋转一圈外部 编码器脉冲数 0 ~…
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 168 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H0C 25
MODBUS 指令应答
延时
0~5000 ms 1
立即
生效
运行
设定
PST
H0C 26
MODBUS 通讯数据
高低位顺序
0- 高 16 位在前,低 16 位在后
1- 低 16 位在前,高 16 位在后
1 1
立即
生效
运行
设定
PST
H0C 30
MODBUS 错误帧格式
选择
0- 老协议
1- 新协议 ( 标准协议 )
1 1
立即
生效
运行
设定
PST
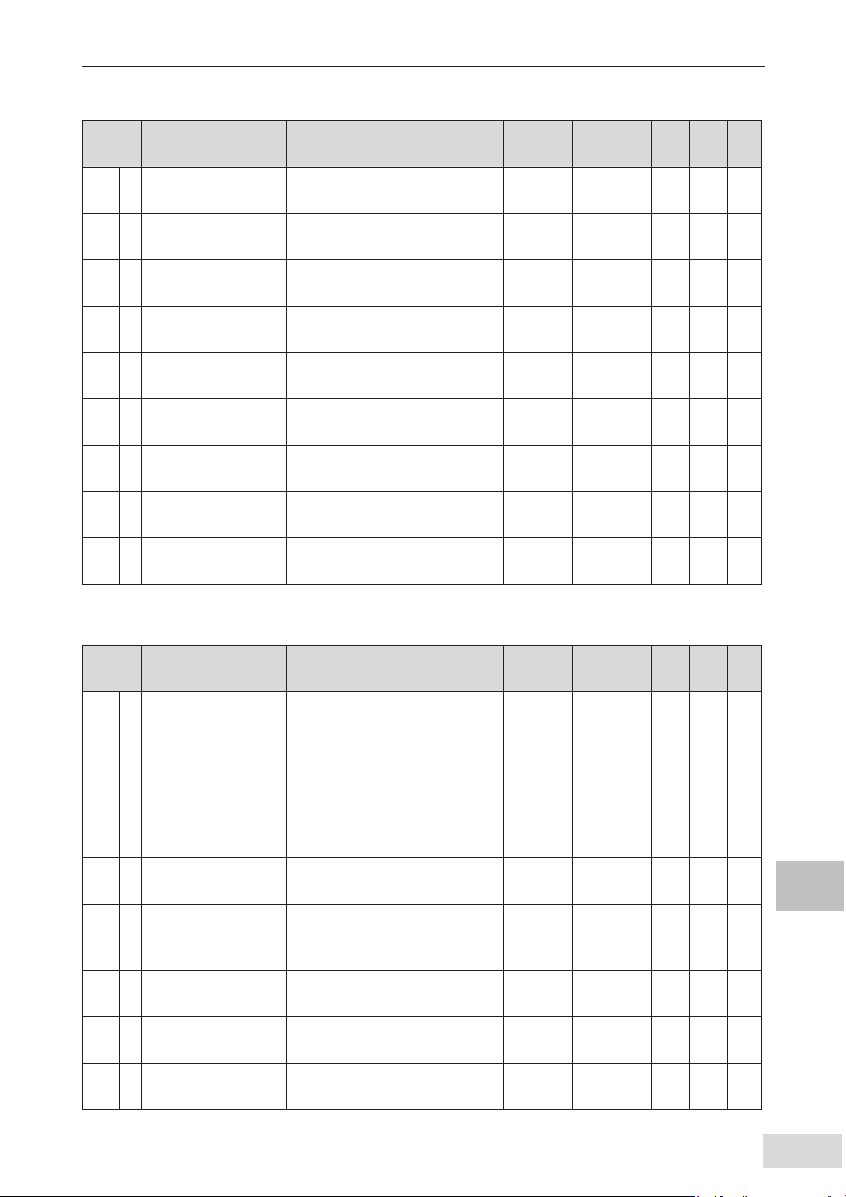
H0D 组 辅助功能参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H0D 00 软件复位
0- 无操作
1- 使能
- 0
立即
生效
停机
设定
-
H0D 01 故障复位
0- 无操作
1- 使能
- 0
立即
生效
停机
设定
-
H0D 02 离线惯量辨识功能 - - -
立即
生效
运行
设定
-
H0D 03 保留参数 - - - - - -
H0D 05 紧急停机
0- 无操作
1- 使能紧急停机
- 0
立即
生效
运行
设定
-
H0D 10 模拟通道自动调整
0- 无操作
1-AI1 调整
2-AI2 调整
- 0
立即
生效
停机
设定
-
H0D 11 JOG 试运行功能 (自带滤波) - - - - -
H0D 17
DIDO 强制输入输出
使能
0- 无操作
1- 强制 DI 使能,强制 DO 不使能
2- 强制 DO 使能,强制 DI 不使能
3- 强制 DIDO 都使能
- 0
立即
生效
运行
设定
-
H0D 18 DI 强制输入给定 0~0x01FF - 0x01FF
立即
生效
运行
设定
-
H0D 19 DO 强制输出给定 0~0x001F - 0
立即
生效
运行
设定
-
H0D 20 绝对编码器复位使能
0- 无操作
1- 复位故障
2- 复位故障和多圈数据
- 0
立即
生效
停机
设定
ALL
H0D 24 重力负载辨识
0- 不辨识
1- 开启辨识
- 0
立即
生效
运行
设定
-
7
IS620P
系列伺服用户手册简易版 第
7
章 功能码参数一览表
- 169 -
H0F 组 全闭环功能参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H0F 00 编码器反馈模式 0~2 - 0
立即
生效
停机
设定
P
H0F 01 外部编码器使用方式
0- 以标准运行方向使用
1- 以反转运行方向使用
- 0
立即
生效
停机
设定
P
H0F 04
电机旋转一圈外部
编码器脉冲数
0 ~1073741824
外部编码
器单位
10000
再次
通电
停机
设定
P
H0F 08
全闭环位置偏差过大
阈值
0 ~1073741824
外部编码
器单位
10000
立即
生效
运行
设定
P
H0F 10
全闭环位置偏差清除
设置
0~100 r 0
立即
生效
运行
设定
P
H0F 13
混合振动抑制滤波
时间常数
0~6553.5 ms 0
立即
生效
运行
设定
P
H0F 16
全闭环位置偏差计数
器
-1073741824 ~1073741824
外部编码
器单位
0 - 显示 P
H0F 18
内部编码器反馈脉冲
计数器
-1073741824 ~1073741824
内部编码
器单位
0 - 显示 P
H0F 20
外部编码器反馈脉冲
计数器
-1073741824 ~1073741824
外部编码
器单位
0 - 显示 P
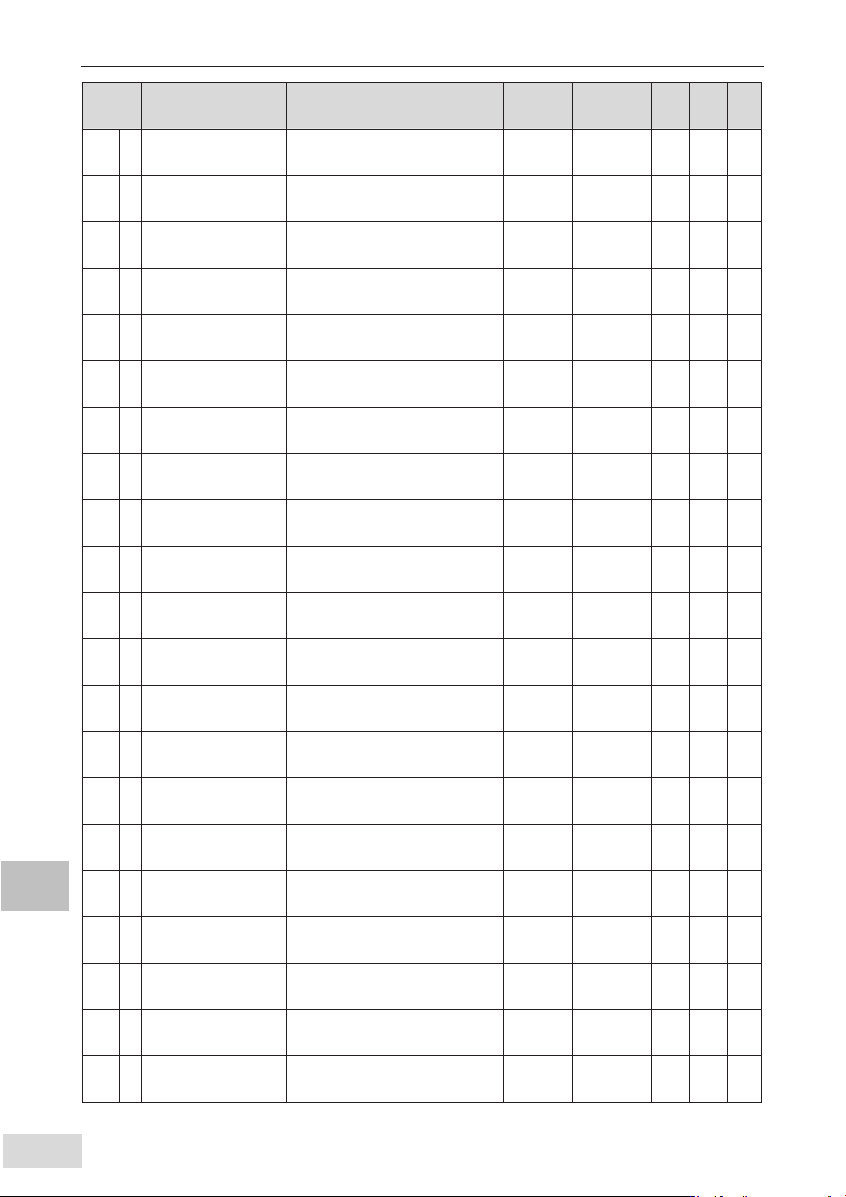
H11 组 多段位置功能参数
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H11 00 多段位置运行方式
0- 单次运行结束停机
(H11-01 进行段数选择 )
1- 循环运行
(H11-01 进行段数选择 )
2-DI 切换运行
( 通过 DI 来选择 )
3- 顺序运行
(H11-01 进行段数选择 )
- 1
立即
生效
停机
设定
P
H11 01 位移指令终点段数 1~16 - 1
立即
生效
停机
设定
P
H11 02 余量处理方式
DI 模式外其他三种模式下有效
0- 继续运行没走完的段
1- 从第 1 段重新开始运行
- 0
立即
生效
停机
设定
P
H11 03 时间单位
0-ms
1-s
- 0
立即
生效
停机
设定
P
H11 04 位移指令类型选择
0- 相对位移指令
1- 绝对位移指令
- 0
立即
生效
停机
设定
P
H11 05 顺序运行起始段选择 0~16 - 0
立即
生效
停机
设定
P
7
第
7
章 功能码参数一览表
IS620P
系列伺服用户手册简易版
- 170 -
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H11 12 第 1 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H11 14
第 1 段位移最大运行
速度
1~6000 rpm 200
立即
生效
运行
设定
P
H11 15
第 1 段位移加减速
时间
0~65535 ms(s) 10
立即
生效
运行
设定
P
H11 16
第 1 段位移完成后
等待时间
0~10000 ms(s) 10
立即
生效
运行
设定
P
H11 17 第 2 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H11 19
第 2 段位移最大运行
速度
1~6000 rpm 200
立即
生效
运行
设定
P
H11 20
第 2 段位移加减速
时间
0~65535 ms(s) 10
立即
生效
运行
设定
P
H11 21
第 2 段位移完成后
等待时间
0~10000 ms(s) 10
立即
生效
运行
设定
P
H11 22 第 3 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H11 24
第 3 段位移最大运行
速度
1~6000 rpm 200
立即
生效
运行
设定
P
H11 25
第 3 段位移加减速
时间
0~65535 ms(s) 10
立即
生效
运行
设定
P
H11 26
第 3 段位移完成后
等待时间
0~10000 ms(s) 10
立即
生效
运行
设定
P
H11 27 第 4 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H11 29
第 4 段位移最大运行
速度
1~6000 rpm 200
立即
生效
运行
设定
P
H11 30
第 4 段位移加减速
时间
0~65535 ms(s) 10
立即
生效
运行
设定
P
H11 31
第 4 段位移完成后
等待时间
0~10000 ms(s) 10
立即
生效
运行
设定
P
H11 32 第 5 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P
H11 34
第 5 段位移最大运行
速度
1~6000 rpm 200
立即
生效
运行
设定
P
H11 35
第 5 段位移加减速
时间
0~65535 ms(s) 10
立即
生效
运行
设定
P
H11 36
第 5 段位移完成后
等待时间
0~10000 ms(s) 10
立即
生效
运行
设定
P
H11 37 第 6 段移动位移 -1073741824 ~1073741824 指令单位 10000
立即
生效
运行
设定
P