03217917-01-01E By DEK Technical Reference Manual Vol 1_enPDFA.pdf - 第230页
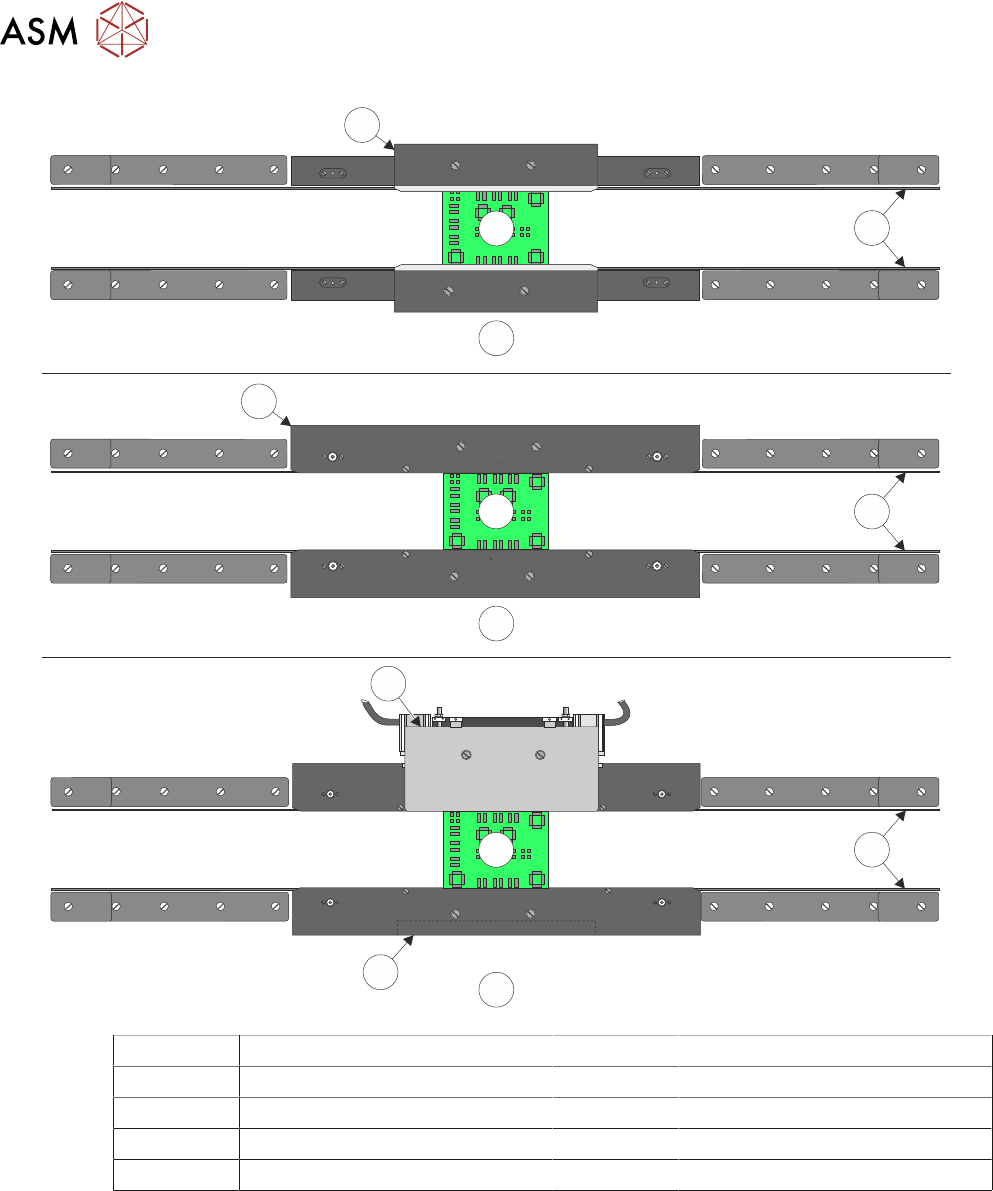
16 TRANSPORT RAILS MODULE 16.1 OVERVIEW 230 TECHNICAL REFERENCE MANUAL Vol 1 E By DEK 04/2019 2 1 3 A 4 2 3 B 5 6 3 C 2 A Board Clamps 3 Board B Foil-less Clamps 4 Rear Foil-less Clamp C Board Snuggers 5 Rear Snugger Pla…

16 TRANSPORT RAILS MODULE
16.1 OVERVIEW
TECHNICAL REFERENCE MANUAL Vol 1 E By DEK 04/2019 229
2
1
1 Flat Profiled Transport Belt 2 Tension Pulley
NOTE
To prevent damage to the camera board stop the remote board stop must be used for product
boards over 1kg in weight. Information on the remote board stop is detailed in the Rising Table
chapter of this manual.
16.1.1 Board Clamping Arrangements
The transport rails can be fitted with one of the following board clamping arrangements:
●
250mm or 500mm Board Clamps (foiled)
●
250mm or 500mm Foil-less Clamps
●
Board Snugger Assembly
Board clamps are used to support boards using the foils fitted to the edge of the clamp. This gives
additional support to the top of the board but the printable image must not extend to the area occu-
pied by the foils.
Foil-less clamps are utilized for thin pliable boards where there is a requirement to print close to the
board edge. The foil-less clamps are assisted with the use of a vacuum box beneath the product
board.
Board snuggers are an alternative to the standard board clamps and are utilized when there is a re-
quirement to print close to the board edge.
16 TRANSPORT RAILS MODULE
16.1 OVERVIEW
230 TECHNICAL REFERENCE MANUAL Vol 1 E By DEK 04/2019
2
1
3
A
4
2
3
B
5
6
3
C
2
A Board Clamps 3 Board
B Foil-less Clamps 4 Rear Foil-less Clamp
C Board Snuggers 5 Rear Snugger Plate
1 Rear Board Clamp 6 Counterweight Block
2 Transport Belts
16 TRANSPORT RAILS MODULE
16.2 ELECTRICAL SCHEMATIC
TECHNICAL REFERENCE MANUAL Vol 1 E By DEK 04/2019 231
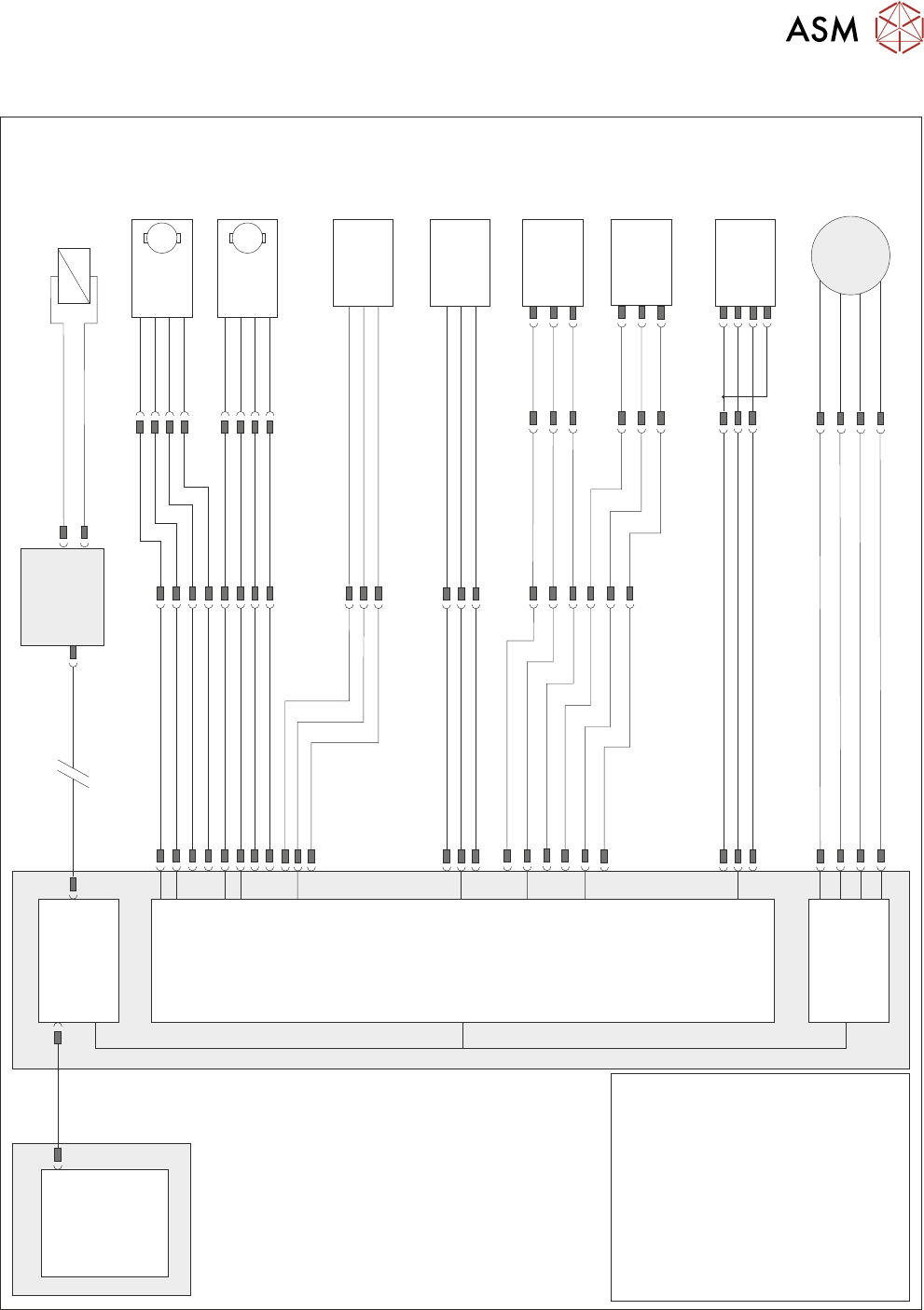
16.2 ELECTRICAL SCHEMATIC
Machine PC
Motherboard
Machine Control Enclosure
Front Belt
Drive (8M03)
Rear Belt
Drive (8M04)
DIG IN 10
DIG IN 11
Rail Lift Left
(8SE5)
Board at Right
Sensor (8SE7)
Board at Left
Sensor (8SE8)
8PL10
8PL04
M36PL17
8PL03
Sig
Sig
+12V
+12V
+12V
0V
0V
8PL12
DIG IN 6
Sig
0V
M36PL22
Moving Rail
Stepper
Motor 2B-
Motor 2A-
Motor 2B+
Motor 2A+
8PL20
8M2
Dual Stepper
X3
NextMove
Interface Card
X4
M
Enable
Direction
24V SW
0V
M
Enable
Direction
24V SW
0V
8SK21
8PL22
8SK23
M36PL18
!DIG OUT 3
DIG OUT 3
DIG OUT 2
DIG OUT 2
NextMove ES
(I/O Node 1)
X5
Board Clamp/
Snugger Solenoid
(16SOL10)
DIG OUT 9
GND
Main Machine
I/O Node 2
N2PL4
CAN Bus
N2SK2
USB
Moving Rail
Home (8SE6)
8PL26
M36PL19
+12V
0V
Sig
DIG IN 5
Rail Lift Right
(8SE4)
+12V
8PL15
DIG IN 7
Sig
0V
NOTES
1.The breaks in the CAN Bus
chain reflect that additional
I/O Nodes may be fitted,
refer to Machine Control
chapter for the complete
CAN Bus chain.
2. Refer to circuit 185231
for the following options:
Heavy Board Rail
Dual Speed Motor
Remote Board Stop
Top Referencing System
Vacuum and Grid-Lok
Tooling.
(L)