DEUKYX-193-1100_G5S2_VOL1.pdf - 第94页
DEUKYX 1-40 193-1100 4.3 PEC-Erkennung 4.3 PEC-Erkennung Die PEC-Kamera erkennt die Passermarken auf der Leiterplatte und die Positionsabweichungen werden berechnet, um die Position der zu platzierenden Komponenten zu ko…
DEUKYX
1-39193-1100
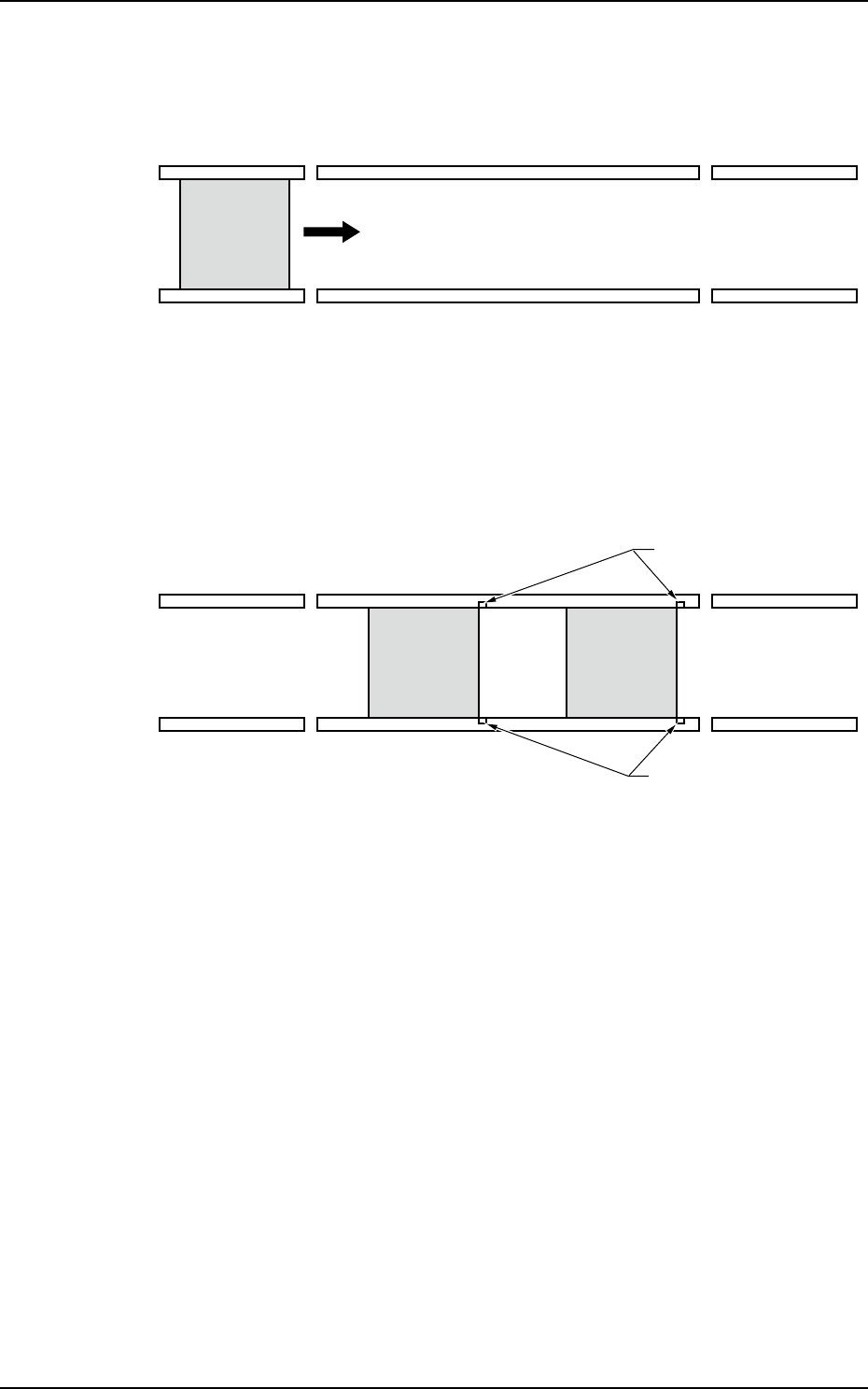
4.1 LP-Zufuhr
4.1 LP-Zufuhr
Die LP von der vorgeschalteten Maschine wird bis zur LP-Positionierungseinheit
transportiert.
LP-Beladeeinheit LP-Entladeeinheit
LP
LP-Positionierung
"L"Einheit
LP-Positionierung
"R"-Einheit
F1A32-1
4.2 LP-Positionierung
Die LP wird vom LP-Sensor erkannt und in der Positionierungeinheit geklemmt.
LP-Beladeeinheit LP-Entladeeinheit
LP-Fiberglassensor
LP-Fiberglassensor
LP-Positionierung
"L"Einheit
LP-Positionierung
"R"-Einheit
PCB PCB
F1A32-2
DEUKYX
1-40193-1100
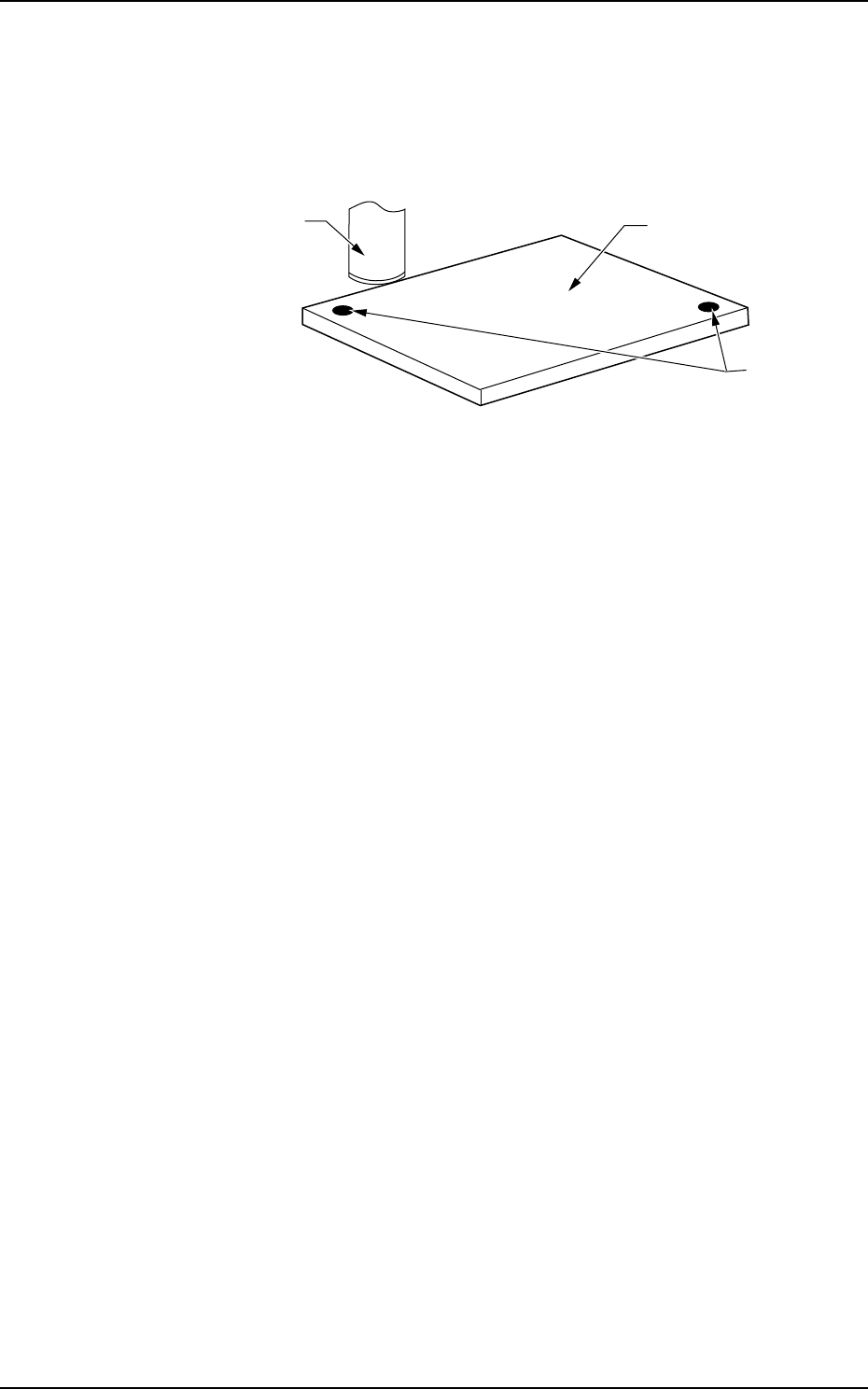
4.3 PEC-Erkennung
4.3 PEC-Erkennung
Die PEC-Kamera erkennt die Passermarken auf der Leiterplatte und die
Positionsabweichungen werden berechnet, um die Position der zu platzierenden
Komponenten zu korrigieren.
Passermarken
LP
PEC
Erkennungskamera
F1A33
4.4 Bauteilzufuhr
Der Gurt-Feeder auf der Feeder-Basis wird in die Position vorgeschoben, in der
die Bauteile aufgenommen werden.
Der Bestückungskopf verfährt mit Hilfe der X/Y-Fünhrung in X- und Y-Richtung,
um das Bauteil aufzunehmen. Danach wird das Bauteil auf die Leiterplatte
platziert.
4.5 Bauteilaufnahme
Die Vakuumaufnehmer im Bestückungskopf nehmen die Bauteile auf.
DEUKYX
1-41193-1100
4.6 Bauteilerkennung
4.6 Bauteilerkennung
Jeder Kopf verfügt über eine Seitenansichtkamera. Diese Kamera wird zur
Erkennung von aufzunehmenden oder senkrecht stehenden Bauteilen verwendet.
Außerdem kann sie die Bauteildicke messen.
Das Bild des vom Vakuumaufnehmer aufgenommenen Bauteils wird von der
Bauteil-Erkennungskamera aufgenommen und inspiziert.
Das Frontlichterkennungssystem und das Hintergrunderkennungssystem
(Option) werden für die Bauteilerkennung verwendet. Eines der Systeme wird
automatisch entsprechend dem in den Bauteilbibliotheksdaten angegebenen
Beleuchtungsmodus ausgewählt.
Bauteilerkennungsablauf
Die Bauteilerkennung erfolgt in den folgenden drei Schritten.
•
BauteilerkennungAlle Bauteile werden für die Erkennung als Objekte behan-
delt.
•
BauteilinspektionAnhand der Bauteilbibliotheksdaten werden verschiedene
Prüfschritte durchgeführt.
•
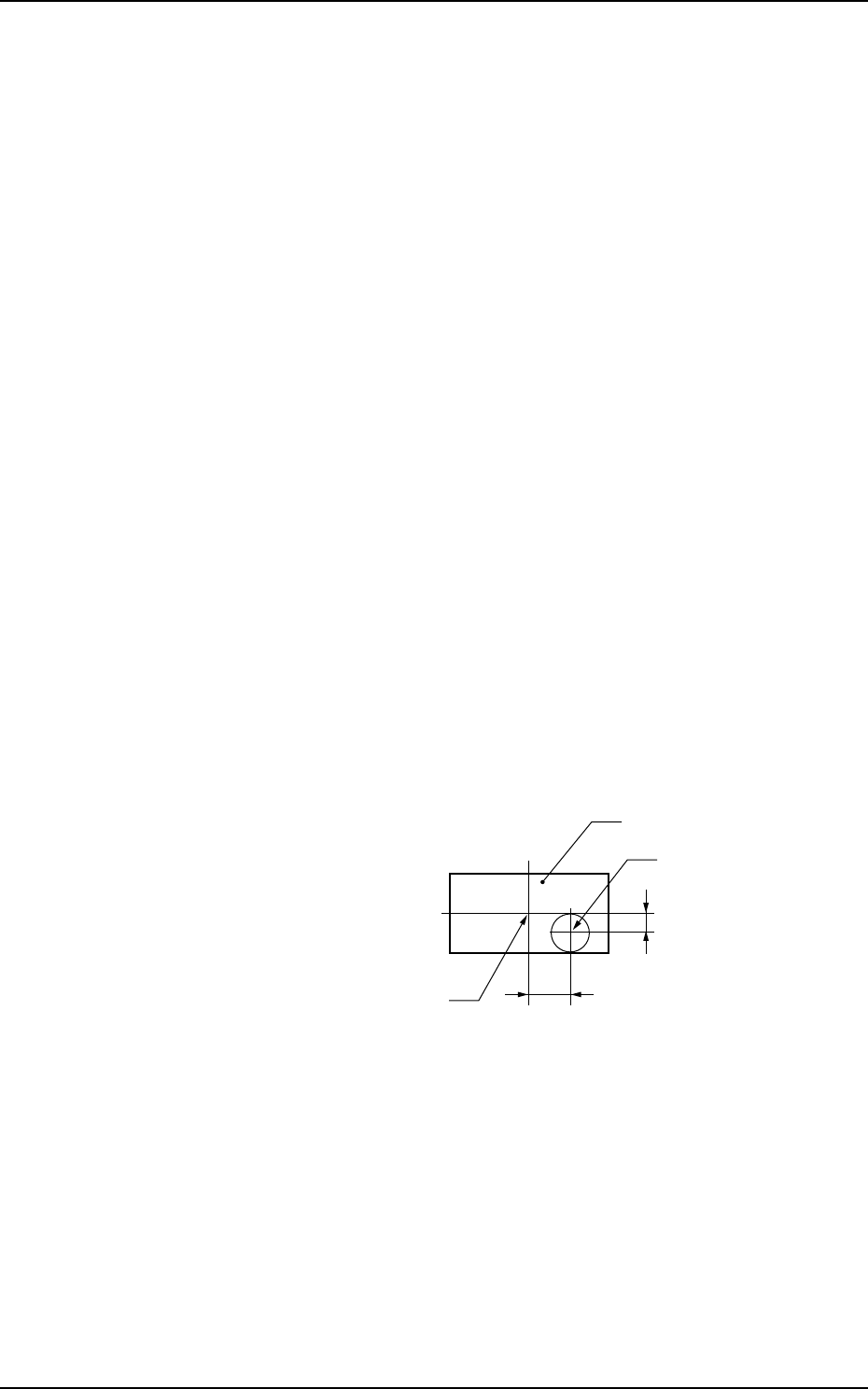
Messung der Positions- und Winkelabweichungen des BauteilsDie Positions-
abweichung (X, Y) und die Winkelabweichung (
q
) zwischen dem Zentrum
der Kamera und dem Zentrum des Bauteils werden gemessen.
Bauteil
Y
X
Bauteilmitte
Vakuumaufnehmer
Status des durch den Aufnehmer aufgenommenen Bauteils
F1A34